| ���A��ģ�������ٶ��ŷ�ϵ�y�еđ���
�ʸ��˹������l�����R����
(�������I��W���������710072)
ժҪ����B��һ�N�˷����y��ģ���ƴ��ڶ���Ķ��A��ģ׃�Y������ԭ�����OӋ��������������ͬ��늄әC�ٶ��ŷ�ϵ�y�������M���˻�ģ׃�����P�Ȟ�2���ŷ����Ʒ�����C�����Y���������M��ϵ�y�������_���ʹ����н�_�ӣ���ͨ�^�x����m�Ŀ������棬ϵ�y�Ŀ������Ք������Ҿ����^�����������Լ��^�ߵĿ��ƾ��ȡ�
0�� ��
��ģ�������������Լ����A���ԣ��ܵ�Խ��Խ��ć������о��ߵ���ҕ�������ڂ��y�Ļ�ģ���ƞ�rʹϵ�y�����ڻ�ģ�����\�ӣ����ڲ�ͬ�Ŀ���߉�g�����ГQ���@������ʹϵ�y�a�������Ӱ��ˌ��H�����еđ��á���ˣ�ᘌ������}������һЩ�W������˸��N���ӵĂλ�ģ�����������������F���xɢ���Ƶġ�ƽ�������о��Y������������ͬ��ʼ�l���Ϳ������£�����ƽ������ݔ����̖�]�h����ϵ�y�У����څ����x����܌������뻬ģ�挢���ٰl���������Ա�����ۿۣ��@�����˕rϵ�y���ɔ_���С���������A��ģ׃�Y������˼��������E1elyanov����������ֱ�Levant��sira��Ramirez�C����ԓ������һ�Nͨ�^��ģ��ĸ��A���M����������Ч���ߣ�ͬ�r���OӋ�rҲ����Ҫ�����P��һ��Ҫ��1�������}���ڻ�ģ��ĸ��A������ʧ��
늙C�ڬF���ٶ��ŷ�ϵ�y�б�����ʹ�ã��ŷ�ϵ�y��һ�NҪ��푑��졢���ɔ_�������ĸ����ܿ���ϵ�y������PID���ơ����_�������Ի����������V�����ã����������^��W�j��ģ�ͅ������m������Ӌ����̫�]���ڑ����б��F�����ݣ�ģ�����ƵČ��F��ه�����ߵĽ��䑪�÷����ܵ������ơ������OӋ��һ�N���A��ģ��������ͨ�^����ģ׃���B�m����A����ʹԭ�����xɢ������׃���B�m�����ɣ�������ϵ�y�ڻ�ģ��Ķ�����C����ϵ�y�����^�õ������Ժ̈́ӑB���ԡ�
1늙Cģ��
�ŷ�ϵ�y��������ͬ��늄әC(���º��QPMsM)�����϶�����^���O늙C�oͲ������F�p���t������ϵ�µ�PMsM�ӑB���̿ɱ�ʾ�飺
ʽ�У�ud��uq��id��iq��Ld��Lq�քe�鶨��dq�S늉��������늸У�R�鶨���@�M��裬�؞��D�ӽ��ٶȣ�J���\�Ӳ��ֵđT����B��ճ��Ħ����Te��늴��D�أ�T1��ؓ�d�D�أ��מ����Ŵ�朣�p��O������
����id=O�Ĵň�������ƣ����Ԍ�ʽ(1)-ʽ(4)�����飺
2���A��ģ�������OӋ���A��ģ�������ȱ����˻�ģ���Ƶă��c��ͬ�r�����˶��ӡ����O�����_�P�ӕr�r�g�����ژ˜ʻ�ģ��B�£�****���x�s���l����O(��)����ôO(r��)�ͱ�ʾr�A��ģ��ʹs(x��t)�ɞ黬ģ׃�������C�s���l����s(x��t)=s(x��t)=s(x��t)=s(r-1)(x��t)=0����������ģ׃��s(x��t)���ɵ��µĠ�B���g����������ϵ�£��ɿ����ɵĸ��A��������ԭ�еĿ�����v��=u(r-1)ֱ��������s(r)(x��t)��ʹ�����е���׃��s(r-1)(x��t)��s(r-2)(x,t)������s(x��t)��s(z��t)�Ƕ��x�ڔUչ��B���g�ϵ��B�m������
2��1��ģ�������OӋ
���˲�ʧһ���ԣ��O늙C������Ġ�B׃��r=[x1��x2]T=[W��iq]T��ݔ�����׃��u=[ud��uq]T���tϵ�y���g��B���̿ɱ�ʾ�飺
ʽ�У�x��R2��u��R2��ki(1��i��6)���鳣��������k1
���O����׃�����ǿɜy���ģ��x��ģ׃����
s=x1-x1ref=0 (9)
��ʽ(9)���ɵã�
��ʽ(10)���ɵã�
�ɴ˿�Ҋ����ģ׃��s�����P�Ȟ�2��ͬ��������O��ģ׃����
s=xl-xlref+��(x1-x1ref)=0 (12)
ʽ�У�����һ�������������M��Hurwitz���ʽ��P(z)=z+��z������ģ׃��s�M���֣��ɵû�ģ׃�������P�Ȟ�1����ϵ�y�OӋ�������P�Ȟ�2�Ŀ����ɡ�
2 2�����ʵ��x��
�O�ֲ�����[y1��y2]��=[s��s]T�����Ԍ������A��ģ���Ɔ��}��Ч�ɲ��_�����Aϵ�y���ޕr�g�ȵķ������}��
ʽ�У�yz(t)�Dz��ɜy�ģ����ǿ���֪����̖��v�Ǿֲ�����ϵ�µĿ���ݔ�룻��(x��t)��y(x��t)�Dz��_���������M�㣺
����һЩ�㷨ʹʽ(13)�����ޕr�g�ȷ�����ԭ�c������һ�N�㷨���Q����Ť���㷨(Twisting algorithm)��ԓ�㷨�ǻ��ڳ�ֽ��Q�ɂ���ֵ���Ԍ��Fϵ�y�����ޕr�g���Ք���ʽ(13)����ƽ��ԭ�c̎���@�N�㷨�����x������ɡ�
�Ou��ʾ������̖u���H������˼��****ֵ���t��ϵ�y���P�Ȟ�1�r��
��Ƶأ�ϵ�y���P�Ȟ�2�r��
ϵ�y�����ޕr�g���Ք��ڻ�ģ��ij�֗l���ǣ�
3����ԇ�
���˙z����OӋ�Ŀ������������Լ��ӑB���ܣ�����MATAB�M���˷����о���늙C�����飺R=O. 07����Ld=O. 3 mH��Lq=O. 5 mH��B=5. 37��10-6 ����=0. 03l 76 N��m��A��J=2. 6��lO-6kg��m2���O����p=2��늙C�~���D�ٞ�1 600 r��min��
�ڌ��H�\���^���У�PMSM��늘��@�M�����S���ضȵ����߶��������Ŵ�朄t���S���ضȵ����߶��pС���O����׃��������R���ٷ�֮��ʮ��L���ٷ�֮��ʮ�塣������������׃���������M��ʽ(17)���Ķ��O��ϵ�y�ĄӑB������
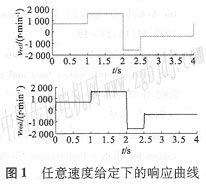
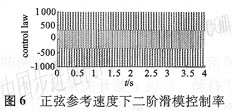
������ʹ�õĿ��ƅ�����VM=990��VM=330�����քe�������ٶȽo�������҅����ٶ��M�����ŷ����ƣ��Dl-�D3�քe��ʾ�����ٶȽo���µ�푑���������ƽ�������Ͷ��A��ģ�����ʡ���ͬ�Ŀ��Ʒ������D4���D6�քe��ʾ�����҅����ٶ��µ�푑���������ƽ�������Ͷ��A��ģ�����ʡ�
4�Y�Z
ͨ�^���A��ģ���������OӋ������Ҫ��ϵ�y�ГQ���������ƺ��������P��һ����1�����IJ������P�Ȟ�2���OӋ���������F������ͬ��늄әC�ٶ��ŷ�ϵ�y�ĸ����ܿ��ƣ��ķ���ԇ�ĽY�����Կ�����ԓ���������^���������Ժ��^�õĄӑB���ܡ����A��ģ�������OӋ˼·�������������Σ����ڌ��F����������ŷ�����ϵ�y���о��ṩ�˿��з�����
|