| ��݆������늄�܇�Ŀ������OӋ
�� �£����x���ﺣ�������ڵ£������
(�������I(y��)��W���������710072)
ժҪ���OӋ�˻���Plc��cPLD����݆������늄�܇������������������Ӳ���·�M���M����Ԕ�����U������늄�܇���]�h(hu��n)�{�ٿ��Ʋ����M���˷�����늄�܇���ٵ����P�����C��늄�܇�������OӋ�������܉F����݆������늄�܇�M�����õ��ӿ��ơ�
�P�I�~��늄�܇��݆ݞ늣��C��������
0�� ��
���S��������صĴ����Ⱦ����ԴΣ�C�����y(t��ng)��ͨ����һ��܇�Ŀɳ��m(x��)�l(f��)չ���RԽ��Խ�������΄ݡ�늄�܇(���º��QEV)�ǽ�Q�������}����Ч;�����õ���Խ��Խ�V�����о��c�l(f��)չ��Ŀǰ��늄�܇�Ǻ��݆��ǰ��݆�ӷ�ʽ�������������fЧ�ʺ�܇�w���g���Ƶȿ��]�������oˢֱ��݆ݞ늙C��݆������ʽ늄�܇�ѽ��ɞ��о����c��݆ݞ��늙C****��׃����܇���y(t��ng)���ӷ�ʽ��늄әC���b��܇݆��݆ݞ�ȣ�늙C���D�Ӟ����D�ӣ�ݔ���D��ֱ�ӂ�ݔ��܇݆���ᗉ�˂��y(t��ng)���x�������p���������Ә������șCе��������܇�����p�p�������˙Cе���ӓp�ģ��������`���������ԡ�
��������݆������늄�܇��ƽ�_�������_݆ݞ늙C�������b�ã��OӋ��늄�܇������������Ҫ�΄��Džf(xi��)�{�������_늙C���D�٣�ʹ늄�܇�߂�ABs����Ӳ��ٵȹ��ܣ����܇�v���������ʡ��_����܇��ȫ�ɿ���
l������Ӳ���OӋ
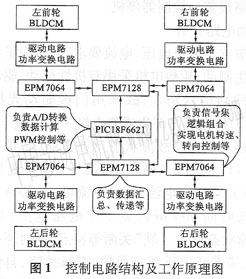
���ˌ��F���_�oˢֱ��݆ݞ늙C�ąf(xi��)�{���ƣ������OӋ�˻��چ�Ƭ�C(PIc)�͏��s�ɾ���߉����(cPLD)����ͨ��늄�܇������������Ҫ�����������·�����·����׃�Q�·��
l 1�����·�M��
�����·�ĺ�����PIcl8F6621���ɿ�cPLD��ͬ�M�ɣ��ɿ�cPLD�քe��EPM7064sLc44-lO(���º��Q��EPM7064)��EPM7128sTcl00(���º��Q��EPM7128)���ĈD1����������PIc�c�ɿ�CPLD�����Pϵ.
l 2�����·�����^��
ϵ�y(t��ng)��늺��{���ͨ�^����P������̤�塢�Ƅ�̤���ṩ���ӡ��Ӝp�١��D���Ƅӡ�ͣ܇���ⲿģ�Mָ�ָ��^λ�Ƃ������D�Q��ģ�M���̖ݔ�뵽PIcl8F662l�����^A��D�D�Q�������a��������PwM��̖��PwMͨ�^EPM7128�ͽoEPM7064��EPM7064�����D��λ����̖��ͨ�^߉�M��Ӌ���ÿ�_늙C�������ٸ���PwM��̖��늙C�M���D�١��D��Ŀ��ơ�ͬ�rEPM7064��늙C�D�ٵ���Ϣ�ͻ�EPM7128��18F6621�xȡEPM7128��늙C���r�D�ٲ��c�ⲿָ������^���M���ٶ��]�h(hu��n)���ƣ���K�_������늄�܇�\�е�Ŀ�ġ�
l 3�^�����o�·
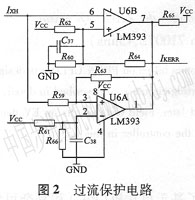
���˷�ֹ݆ݞ늙C�@�M����^�d����ɓp�ģ������·���OӋ���^�����o�·��
��������������Լ��p���^��LM393�M�����^�����o�·����D2��ʾ��
��������������z�y���������O��100A��ݔ��늉�0��5 V�����^�V��������������·���D2��LM393�Ĺ��_6��Iݔ��ֵ��O��5 V���ɈD��֪����I��ݔ����0��5��4. 5 V�r(��ͨ�^��׃R��R61��R62��R66����ֵ����׃ԓ���o��)���^����̖Iݔ�����ƽ������IxH����0��5 V�����4��5 V�r��Iݔ�����ƽ�����o�·�Ĺ����^���ǣ����^���l(f��)���r�����^��LM393ݔ��I�l(f��)���ƽ��׃һ�����·��һ������ͣ�C��
1��4���·����
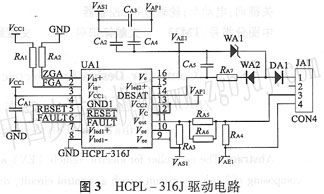
���]����늙C늉������Ҫ��ͬ�r���ˌ��F늄�܇�����Ƅӣ�݆ݞ늙C�����p�O���ӣ���оƬ��Ҫ�Ѓ�·��̖ݔ�룬�ʲ����T�O�ӹ������HcPLһ316J����Ȳ����ɼ�늘Oһ�l(f��)��OV늉�Ƿ͙z�y�·�����Ϡ�B(t��i)�����·�������м���cMOs��_TTL�ƽ������x���߉�(****늉����_1 200 V)�����^�����(��������_150 A)���췴��(���L�r�g500 ns)��������늉�����(15��30v)�����Ϡ�B(t��i)��������ܛ���P������c��ͬ�r߀�ṩ�^�����o�������h(hu��n)Ƿ���i�����o��߉���ϡ��Ի֏͵ȱ��o���ܣ������·�Ŀɿ������ṩ�˱��ϣ�ͬ�r߀���к������F�����c��
���OӋ��������6ƬHcPL-316J��ÿһƬ��һ��M0sFET�����·�B�ӈD��D3��ʾ��ZCA��FGA����EPM��7064�l(f��)��������PwM�ͷ���PwM��̖�����^�����ɹ��_11ݔ����MOsFET�T�O�����Ӳ��_jAl�Ĺ��_3��JAl�Ĺ��_l�B��MOs��FET��©�O�����_4�B��M0sFET��Դ�O��REsET��ϵ�y(t��ng)��λ��̖��FAuLT��HcPLһ316J��늉��z�y������̖�����z�y��MOsFET��©һԴ�O늉�V�����~��ֵ���f�����ʹܱ��������tFAuLT�ɸ��ƽ��׃?y��u)���ƽ��ͬ�r�Ԅ��P������ӣ����˱��o늙C��Ŀ�ģ�RA5R��RA6���T�O����衣
1��5����׃�Q�·����"
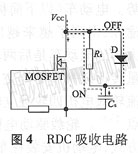
���Ĺ���׃�Q�·����������������B(t��i)�B�ӷ�ʽ�������_�P��������MOsFET�M�ɡ�
����MOsFET����APT��˾���a��APT20M22LvR��ԓMOsFET�����_�P푑�Ѹ��(���L160 ns)����ͨ���RС(0. 022 n)��©���С(��loo nA)�����c���P���r�͉�V�顣200 V����ͨ���I���_100A��
����ʹMOsFET��ȫ��Ч�ع������pС���B(t��i)늉�������dv/dt�����������������·����D4��ʾ��������RDC�W�j�c�������������ɡ���M0sFET�P���r��ؓ�d������^���O��D�o���c��늣���u�pС��������c�ɶ�늉�����ͻ׃��MosFET��V������dv/dt�����ƣ����Խ��dv/dtԽС������һ��MosFET�_ͨ�r��©�Oĸ��늸��Լ����_�·�̓Ȳ�Ԫ�����sɢ늸�����Ч��������MosFET��di/dt�����c�����ߺ�M0sFET��늣����������R���ƣ���Kc����������R�ϡ�
2������ܛ���OӋ
������ܛ���OӋ����ģ�K���Y������������A��D�D�Q�ӳ���늄�܇�{�ٿ����ӳ���Ȏײ��ֽM�ɡ�
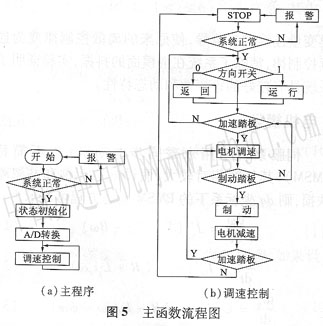
ϵ�y(t��ng)��늺������M�Йz�y�������_�Pλ�á�늙C��B(t��i)�ȣ��й��ό�����ϵ�y(t��ng)���������������M�г�ʼ���������{��PwM�����x�Ĵ����ȣ�Ȼ���_ʼ�M��A��D�D�Q��18F662l����10λ��A��D�D�Qͨ���������յ��ⲿģ�Mָ���(�緽��P����٣��Ƅ�̤��)����λ�Ƃ�����ݔ����O��5 V��늉�ָ���D�Q��O��2(1 024)�Ĕ���ָ�ԓ����ָ�����Դ_��PwM��ռ�ձ�a��
�S���M��늙C�{�ٿ���ģ�K�����{�ȿ����_ʼ�r늙C̎��ֹͣ��B(t��i)��ϵ�y(t��ng)�������(���������e�`��ͬ�r��̤����̤����Ƅ�̤���)���t��ʼ�K̎��ֹͣ��B(t��i)������������t�z�y�����_�P��̖�����ƽһǰ�M�����ƽһ��܇���M����������̤����̖�Ĵ�С��׃PwM��ռ�ձȣ��M��늙C�{�٣�����܇�١���܇�v����B(t��i)��������Ƅ�̤����̖ݔ�룬ϵ�y(t��ng)�M���ƄӠ�B(t��i)��늙C�p���Ƅӣ��˕rϵ�y(t��ng)�����Д����̤��ָ�����ָ��t���ؼ��٠�B(t��i)����t݆ݞ늙C��һֱ�p��ֱ��ֹͣ���_ʼ��һ��ѭ�h(hu��n)��ϵ�y(t��ng)���ƺ������̈D��D5��ʾ��
3���
�����Mһ����늄�܇����������M���о����҂��OӋ��������һ�_늄�܇��ԭ���܇����������܅������£�****܇��38km��h���d������200 kg��һ�γ��������50 km������݆��늙C�����şoˢֱ��݆ݞ늙C���~������700 w���~���D��800r/min���D�ӴŘO����8���O��늄�ֱ݆��4lOmm����D6��ʾ��
�����M��������
(1)ĸ������z�y
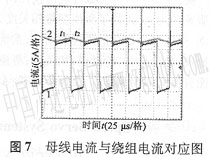
늄�܇݆ݞ늙Cĸ���c�@�M���������D7��ʾ����̖��l(f��)����ĸ��������Σ���̖��2�����@�M������Ρ��ĈD�п��Կ�������t���A�Σ��yԇ���@�M���B��MOsFET�_ͨ��ĸ��������@�M����������҃���б��һ�£�t�A��M0sFET�P�࣬����½���
(2)�y�ٌ��
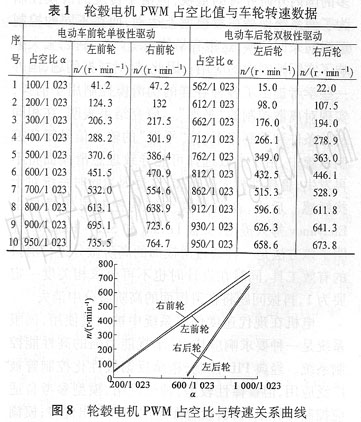
����ͨ�^�xȡ݆ݞ늙C10��PwMռ�ձ�ֵ���c�䌦����늄�܇ǰ��݆�D�٣����M��늄�܇�{�ٜyԇ�����w��ֵ�����Pϵ���1��ʾ����������ֱ�^�����Č���l�Д�ֵͨ�^Matlab�M���L�D�����L�����D��D8��ʾ�������D��C��܇݆�D���cPwMռ�ձ�(��PwM��̖���}�_���Ⱥ�PwM���ڵı�ֵ)�������Pϵ�����OӋ�У�PwMռ�ձ�a�Ŀ��ƾ�����lOλ����d��׃��������O��1 023��l 023��l 023�����ڲ����`��͜y���x����Ӱ푣�������ijЩ�c���м�С��ƫ�
4�Y�Z
��݆������늄�܇�ij��F��ʹ���y(t��ng)܇�v�ęCе����ϵ�y(t��ng)�õ������������˙Cе���٣��Ķ������܇�v���w�������fЧ�ʡ�����늙C�D��ֱ��������܇݆�ϣ����Ը�������M��܇�v�������ơ�ͨ�^��늄�܇�����P���C���˱����OӋ����݆������늄�܇���������ɺ�����늄�܇��Ч�����ã�ͬ�r��C��늄�܇���Ʋ��ԵĿ����ԡ� |