һ�N�Π�ӛ���Ͻ�z�(q��)�ӵķ��\ˮƽ�����M��
���P���������������^�s���
(�����I���I(y��)��W(xu��)�������������I150001)
ժҪ����������F(xi��n)��һ�NsMA�z�(q��)�ӵķ��\ˮƽ�����M����ͨ�^�������������Y(ji��)��(g��u)�Ͳ���Ҏ(gu��)�ɣ������˷��R�\ˮƽ�����M���IJ��әC��(g��u)ԭ��ģ�ͣ��������������Ԫ��Ȼ���O(sh��)Ӌ���Π�ӛ���Ͻ�z�(q��)�ӵġ�������������Ԫ�ğo����b�ط��\ˮƽ�����M���������p��(c��)10����Ԫ�ķ��\ˮƽ�X���M���M�����΄�ԇԇ����ԓ���M�����Ԍ��F(xi��n)ǰ�M�����ˡ������D(zhu��n)���ܣ����Ԍ��F(xi��n)8 mm��s���΄��ٶȺ�12����s���D(zhu��n)���ٶȣ������Пo�����o��Ⱦ���(q��)��늉��͡��C���Ժá��Y(ji��)��(g��u)���������ܷ�ȃ�(y��u)�c�����ƽ���w�Y(ji��)��(g��u)�܉��M��Mխ��(f��)�s��ˮ�
^(q��)���M��̽�y��
�P(gu��n)�I�~�����\�����Π�ӛ���Ͻ�z����������Ԫ�����\ˮƽ�����M��
�ЈD���̖��TM38 �īI���R�a��A ���¾�̖��1004��7018(2008)05��0057��03
O�� ��
�Ј�����������P(gu��n)���g(sh��)�İl(f��)չ�����˙C���˼��g(sh��)�İl(f��)չ���ں����_�l(f��)�����P(gu��n)�I(l��ng)�����\�ÙC���˼��g(sh��)�������˸��������ҕ�����y(t��ng)���������M��������Դ�����ʵͣ��Y(ji��)��(g��u)�ߴ���������h(hu��n)���_�Ӵ����ɿ��Բ���ӡ��������ܲ��Լ��\���`�����ܲ��ȱ�c����������S�������W(xu��)�о��IJ����M�������й����ߵ�Ŀ�⼯�е��L��������ˮ�£��e������ˮ���������ε��~��΄әC�����о��ϡ��~�������Ȼ���������������N��࣬����h(hu��n)�����������˔zȡʳ��ӱܔ�������ֳ����ͼ�Ⱥ��ε�������Ҫ���~�(j��ng)�^�|�f�����Ȼ�x���M�����˷Ƿ���ˮ���\���������ȿ����ڳ־������±��ֵ��ܺġ���Ч�ʣ�Ҳ�������������ٻl(f��)�������F(xi��n)�ߙC����[1]�������~��΄әC���ƄәC������ˮ�¸��ε��뷨�����S�������W(xu��)�����ϿƌW(xu��)���Ԅӿ�����Փ�ȌW(xu��)�Ƶİl(f��)չ�ɞ�F(xi��n)�����ں������кܶ�������΄��ٶȿ죬�����\���`��@�����������������ص��΄ӷ�ʽ��������\���������M���ć����Ч�ʵ������ӏ�(f��)�����M��ʽ�팍�F(xi��n)�΄ӣ����ڸ����΄ӕr��Ҫ����ˮ���M���ڵ����΄ӕr��Ҫ�����w�ɂ�(c��)�����������M�����Ԍ��F(xi��n)�`���ǰ�M�ͺ��ˡ��@�N���M��ʽ���о�ķ����rֵ��
1���\���΄әC��
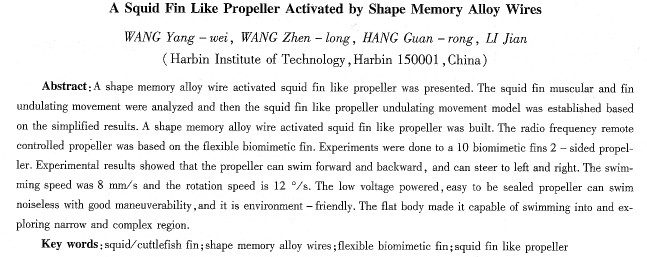
���\�����^��V����,�ǟo��ܛ�w������\����D1��ʾ����Ӣ�����ЃɷN�з���һ�N��Squid,��һ�N��Cuttlefish���ĈD�Ͽ��Կ���������������������ͬ��Squidβ�������^С����Ҫ���Á�
�������wƽ��ģ���cuttIefish�������@������Ĥ�ϣ����˱������w��ƽ���⣬߀���������䲨���ε��\���Ƅ�����ǰ�M�����˺��D(zhu��n)���ȣ�����ˮ���M�ȹ��ܲ�e����[2]��
���\��Ҫ����ˮ���M��ʽ���F(xi��n)�����΄ӣ�����****���_ÿС�r150 km�����\�������Q�ֲ������w�ăɂ�(c��)���܉��й�(ji��)��IJ��ӣ������΄Ӻ͑Ҹ����mȻ����Ĥ�տs��ˮ���M�ṩ���\�ӵ���Ҫ�������������ڵ����΄ӡ����ַ�(w��n)���͑Ҹ��r������Ҫ���á����\���������M������~��е�����ģʽ(Rajiform)[3]�������ڞ��\�������Եģ��]�й���֧�Σ������\�ӷ��ȿ��Ը����`����Ҳ��������ͬ���\�����ӕr���ϙM������(sh��)��ͬ��
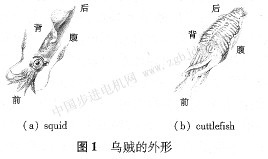
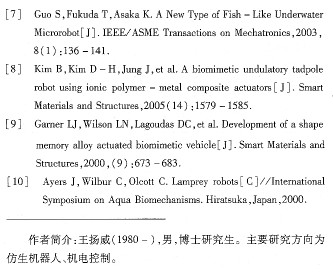
���\���ļ���Y(ji��)��(g��u)��D2��ʾ���D�У�cT��ʾ����б�Y(ji��)���M���w�S��DF��ʾ����(c��)�Y(ji��)���M����Ĥ��DV��ʾ��������F(xi��n)c��ʾ��ܛ�ǣ�L��ʾ�v�⣬MF��ʾ����Y(ji��)���M����Ĥ��T��ʾ�M����vF��ʾ�����Y(ji��)���M����Ĥ���΄ӕr�M������Ҏ(gu��)���տsʹ���ֲ����ϻ����������������γɲ��ӣ�ͬ�r�������տsʹ��׃�������\���еęM��ͨ�^Ҏ(gu��)���տs��ÿ������Ԫ�ڲ�ͬ����λ�M�ϳ������ӵIJ��Ρ�
2���\ˮƽ�����M����ԭ��
���\ˮƽ�����M����ͨ�^ģ���\���������Y(ji��)��(g��u)���\�ӷ�ʽ���������ͽY(ji��)��(g��u)�O(sh��)Ӌ�Ϳ��Ʒ����a(ch��n)���c����Ƶ����M�����Ķ�ʹ���M�������@�N�����ӷ������M���������F(xi��n)ǰ�M�����ˡ��Ƅӡ��D(zhu��n)���ܡ����\ˮƽ�����M�������ɲ��֣����M���IJ��әC��(g��u)�����M���Ŀ���ϵ�y(t��ng)��
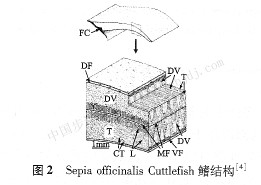
���M���IJ��әC��(g��u)����(j��)���\���ĽY(ji��)��(g��u)�M�к��������\�ӷ�ʽ���Ժ�������������Ԫ����һ���ĕr���P(gu��n)ϵ�@���Ե�����Ԫ���c(����Ԫ�c�C�w���B���c)���������ӏ��Ա�Ĥ�γɲ�������������Ԫģ���\�ęM�����Ï��Ա�Ĥ���B����������Ԫ�γɲ������档ͨ�^��������Ԫ�ď������ӏ��Ա�Ĥ���ӣ��D3�鲨�әC��(g��u)����Փģ�ͣ��D��̓����ʾ��������Ԫ������B(t��i)�����\���IJ��Ӳ��ο��Կ������o��ÿһ�l�M������λ�M�϶��ɵģ����Բ��әC��(g��u)��ģ�;���ͨ�^ÿ����������Ԫ�����\�ӵ���λ��M�ϳ��\�Ӳ��Ρ�
���M���Ŀ���ϵ�y(t��ng)����Ҫ������ͨ�^��Ƭ�C��������Ԫ��ͨ늕r�g��Ҏ(gu��)���\�ӣ�ʹ���M���IJ��әC��(g��u)���F(xi��n)Ҏ(gu��)�ɵIJ��ӡ����M���Ŀ���ϵ�y(t��ng)����������̖�հl(f��)ģ�K��̎����ģ�K���(q��)��ģ�K��������̖ͨ�^�հl(f��)ģ�K���պ����̎����ģ�K����̎����ģ�K����̖�M���Єe���D(zhu��n)������(y��ng)�Ŀ��Ƴ���ݔ���|�l(f��)��̖�������(q��)��ģ�K���(q��)������Ԫ��
3�����Π�ӛ���Ͻ�(SMA)����������Ԫ
����(n��i)��V��ʹ�õķ����C���˵�������Ҫ�У�늙C[5]������մ�[6]������(q��)�Ӿۺ���[7,8]��sMA[9,10]���Â��y(t��ng)늙C�����O(sh��)Ӌ�������M�������ڽY(ji��)��(g��u)��(f��)�s���w�e���l�ʵ͡��ɿ��Բ�Ȇ��}���y�ԝM���(q��)��Ҫ�����Ŀǰ��Խ��Խ����о��C��(g��u)�_ʼ�о����ډ���մɡ�늾ۺ����sMA�����ܲ��ϵķ���������
sMA��һ�N�����С��(q��)�Ӻ͈�(zh��)�й�����һ�w�����ܲ��ϣ�������׃�^���Юa(ch��n)���Ļ؏�(f��)���ܴ����Ĺ��ر�(����������)Ҫ�h�h����늙C��������ڷ����C�����Б�(y��ng)���^�V����
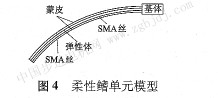
��������Ԫ��ģ����D4��ʾ���ɻ��w�������w����Ƥ���Π�ӛ���Ͻ�(���QsMA)�z�M�ɡ���Ƥճ���ڏ����w�ϣ������w�B���ڻ��w�ϣ����w�B���ڲ������M���ϡ�sMA�zǶ������Ƥ�͏����w֮�g����sMA�z���տsģ���\���ęM�����������w����Ƥ�ஔ�ڽ���б�Y(ji��)���M���w�S����Ĥ�����������w�S��Ƥ�ӡ�
�����w����Ҫ�����ǃ��揗���ܺ�����sMA�z�ĸ������w��Ҫ�����w���m��?sh��)ď���ģ����ʹ����Ԫ�����r�惦�����ܡ�
��������Ԫ����Ƥ����Ҫ�����Ƿ�ֹsMA�z©늡����揗���ܺ�ճ�Y(ji��)sMA�c�����w��sMA�z����늼ӟ᷽ʽ�(q��)�ӣ�����cˮ���|���a(ch��n)��©늣���Ӱ�sMA�z�ļӟ���׃��
4���\ˮƽ�����M����Cģ��
4��1����������Ԫ�[��
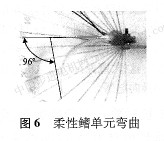
����ԇ����������Ԫ��D5��ʾ���p�沼SMA�z����������Ԫ�[�Ӷ��L49 mm������Ԫ��14 mm������늉�12 v��ֱ���Դ����ˮ��17��l���£�ͨ늕r�gO��005��0��08 s���g��0��005 s���M��ԇ����Ԫ��0��06��O 08 s�r�������ǶȾ���90��������ͨ늕r�g0 06 s�r��SMA�Ĝض��ѳ��^����׃�Y(ji��)���ضȡ�
�����}��0��06 s������ͨ늕r�g�g��1.8 s��ˮ�؞�21 oC��ԇ���������Ԫ��12 V늉��µĔ[����r��SMA�zͨ늼ӟᵽ����׃�ضȕrѸ���տs������Ԫ�����Ƕ��_��****96������D6��ʾ��
4��2���M���IJ��әC��(g��u)
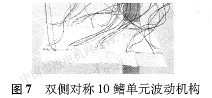
���\���ڲ��ӕr��ÿһ�l�M���տs�������ֲ��a(ch��n)������׃�Σ��S���l�M�����а�Ҏ(gu��)���տsʹ���������γɲ��Ρ�����ԇ������Ԫ�f(xi��)�{(di��o)�\�ӕr��������IJ�����r�������p��(c��)���Q10����Ԫ���әC��(g��u)��ģ�M���\���IJ��ӡ����әC��(g��u)��D7��ʾ��
�C��(g��u)ÿ��(c��)��5����������Ԫ������Ԫ�����g��35 mm������Ԫͨ�^���z��Ĥ�B���γɲ������档ԇ�Y(ji��)�����������M���IJ��әC��(g��u)�����f(xi��)�{(di��o)���������Ժã��\���`����Ԍ��F(xi��n)ǰ�Ӽ��ɂ�(c��)��ͬ����IJ��ӡ�
4.3���\ˮƽ�����M��
���\ˮƽ�����M���Ŀ���ϵ�y(t��ng)��Ҫ��2262�csc2272�ğo���b�ؼ����·ģ�K��
PIcl6F877A��Ƭ�C��(g��u)�ɡ���Ƭ�C�UչһƬ�ɾ��̲��нӿ�оƬ82G55AP��82G55AP�Ŀ��ƶ˿�ֱ���cHcl6F877A��Ƭ�C�B�ӣ�����(sh��)��(j��)�˿�ͨ�^һƬ��(sh��)��(j��)�i����Hc373�cPIcl6t��877A��Ƭ�C�B�ӡ�82G55AP��24·ݔ���˿��cMOsFETԪ��IRF311�Ŀ��ƶ����B���o���b��ģ�K�Ŀ�����̖�cPIcl6F877A���ƽ׃���Д�˿��B�ӣ���Ƭ�C��Rc�˿�����ݔ���ڣ����ڿ���Hc373��82G55APRD�˿����锵(sh��)��(j��)�˿ڣ���(j��ng)Hc373�i�����o82C55APݔ����
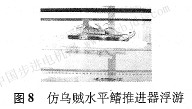
���ßo���b�����Ʒ��\ˮƽ�����M���΄ӣ���D8��ʾ��ͨ늕r�g80 ms��ˮ��20oC�������M���M��ԇ
ԇ���������\ˮƽ�����M�����Ԍ��F(xi��n)8mm��s��ֱ���΄ӣ�ͨ�^��׃���ӷ������M�������`���ǰ�M�ͺ��ˣ�߀���Ԍ��F(xi��n)12����s���D(zhu��n)���ٶȡ�
5�Y(ji��)�Z
����ᘌ��������΄ӱ��^�`��Ğ��\���΄әC���M�з������������������M��ʽ�M���m��������ģ���\���������Y(ji��)��(g��u)�����˷��\ˮƽ�����M������Փģ�ͣ��O(sh��)Ӌ�����˷��\ˮƽ�����M����Cģ�͡�ԇ�������\ˮƽ�����M�����Ժܺõ�ģ���\���IJ����΄ӣ����M�����Ԍ��F(xi��n)8mm��s���΄��ٶȣ�߀���Ԍ��F(xi��n)12����s���D(zhu��n)���ٶȡ��@�N���M�����Пo�����o��Ⱦ���(q��)��늉��͡��C���Ժá��Y(ji��)��(g��u)���������ܷ⡢�Π�ӛ���Ͻ�ɳ��ܸ߉��ȃ�(y��u)�c�����ƽ���w�Y(ji��)��(g��u)ʹ���܉��M��Mխ��(f��)�s��ˮ�
^(q��)���M��̽�y������������̽�y�����Һ͙z�y����������Ⱦ�ĵط���Ҳ�����Á���̽���Ρ�
|