����SVM�Į���늄әCֱ���D�ؿ��Ʒ���
������1�����V��2���ǽ�1
(1�A��������W���V�|�V��515640��2���^��W���V�|���^515063)
ժҪ�����˜pС���yֱ���D�ؿ��ƵĴ�机��D���}�ӣ����Å���늉�ʸ��Ӌ��ģ�K�Ϳ��g늉�ʸ���{��(SVM)ģ�Kȡ�����h���^�����_�Pʸ������������Matlab��Simulink����ܛ������ʸ���{�ƵĮ���늄әCֱ���D�ؿ���ϵ�yģ�͡���札h��늉�ʸ�����^����Ӌ��ó����D�حh��늉�ʸ������Ч�ķֽ�����D��PI���������D���D���c���Ӵ�朳˷e�o��������Y��������ԓֱ���D�ؿ���ϵ�y�OӋ���_���_�������õĿ���Ч����
�P�I�~��ֱ���D�ؿ��ƣ�����늉�ʸ����ʸ���{�ƣ�����
��Ȧ���̖��TM346 �īI���R�a��A ���¾�̖��1004��7018(2008)05��0049��03
0�� ��
ֱ���D�ؿ��Ƽ��g���Ʒ������Ρ��D��푑��졢�����Ժá��ұ��ڔ��ֻ����F�������م^�����^���机��D���}�ӡ��īI[1]����S����M�ͽ�Q����������s�̿������ڡ������_�Pʸ�����������ÿ��g늉�ʸ���{�ƵĿ��Ʒ������F�Ȟ�ͻ����
���gʸ���{�Ƶ�ֱ���D�ؿ��Ʒ������c���څ���늉�ʸ����Ӌ�㡣�o���ķ�������T��G��Hahetler�������Ҫ˼������һ���ɘ����ڃȵõ��D�صĽo��ֵ�c����ֵ֮�����ʹ�D���`��ʹ���`�����Ŀ��g늉�ʸ�����īI[2]ͨ�^������늙C���̵Ĵ�朼��D�صĶ��η��̫@�Å���늉�ʸ����Ӌ����s����ه��늙C�������īI[3]���ڶ��Ӵ�朅�������ϵ�£���机��D�صķքe���Ƶğo���ķ�����Ӌ����s�Ƚ��ͣ�����ه��늙C���������˺���Ӌ�㣬�īI[4]�ڶ��Ӵ�朅�������ϵ�£������pPI������ֱ�ӫ@ȡ늉�����ʸ����Ӌ�����pС����PI�����������s�����ʸ��ƫ���ͨ�^���ٸ�׃ÿ�����ڃȶ��Ӵ���D�^�ĽǶȿ����D�أ��S�ִ�朷�ֵ�㶨�����ýǶȺͷ�ֵ׃���ϳɅ���늉�ʸ�����īI[5]��ͨ�^�D�ص�׃�����c�D��ͻ׃���Ƴɱ���������PI�{�����@�ýǶ�׃�������īI[6]�Ǐ�늙C�������̳��l�����_�ƌ��ó��Ƕ�׃������ͬ�ӣ����÷Ǿ��Է��������ܿ����܉�ܺõī@��늉�����ʸ�����īI[7]���û�ģ׃�Y�����Ʒ����õ���
���ď�ֱ���D�ؿ��ƵĻ���ԭ�����l���ڶ��Ӵ�朅�������ϵ�£����ڴ�机��D�صķքe���Ƶğo���ķ������х���늉�ʸ����Ч�ֽ������������{�������@�ã����õذ����˴�机��D����Ϣ����Ч�pС�˴�机��D���}�ӡ�
1����늄әCģ��
���D��������ϵ�£�����늄әCģ���ǣ�
ʽ�У�us��is�ͦ�s�鶨��늉�ʸ�������ʸ���ʹ��ʸ����is�ͦ�s���D�����ʸ���ʹ��ʸ����Rs��Ls�鶨������늸У�Rr��Lr���D������늸У�Lm�黥�У���ref�ͦ�r�酢������ϵ�D�ٺ��D���D�٣�p��늙C�O������Te��늴��D�أ���s��r��d��g�������Ӻ��D�ӷ�������������ϵ�·�����
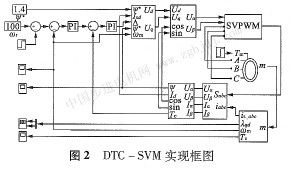
2.DTC��SVM���Ʒ���
2��1 DTc��sVM����ԭ��
sVM����һ���������ڃȣ�����sVM�㷨���ڲ�ͬ���ȅ^�ȣ�����׃����8���������g늉�ʸ�����x����m��ʸ�����ϳ�Ŀ��ʸ������D1��ʾ��
Uref�酢��늉�ʸ����U1��U2������늉�ʸ����T0��T1��T2�քe��һ����������T����ʸ��������ʸ�������Õr�g����ƽ����߅�η��t�ó������ȅ^늉�ʸ���ϳ�ԭ������[2]��
�e�أ�����늉�ʸ���^��T1+T2>T�r��ȡ
DTc��sVM��ͨ�^���ֶ��Ӵ�朷������㶨�����ٸ�׃���D�Ӵ��֮���D���ֱ���D�ؿ��Ɓ��@�Å���늉�ʸ�����@������늉�ʸ��������朿��ƺ��D�ؿ��Ƶ���Ϣ����svMȡ���������_�Pʸ����ȥ�ϳ�Ŀ��ʸ�����F늙C���ơ�
2.2���M�o���Ŀ��Ʒ������F
2��2.1 d�S늉�����ʸ��
�ڶ��Ӵ�朅��������£�q�S���ʸ������㣬��朄ӑB������ȫ��d�S늉�ʸ�����ơ��t�У�
��T��ɘ����ڣ�k��ɘӕr�̣���
�ɟo���ķ���֪��k+1�r�̶��Ӵ�朵��ڽo��ֵ�ˣ�ʽ(8)�xɢ�����cʽ(9)�����õ���
2��2��2 q�S늉�����ʸ��
�D�ؽo��ͨ�^�D��PI�������@�á���ʽ(1)�У��������ϵ�D�ٵ��ڶ��Ӵ���D�٣��� ref=�� e���У�  �ڶ��Ӵ�朅�������ϵ�£�ʽ(5)���D�ر��_ʽ�飺
�����Ӵ�朷�ֵ�����㶨���D��ֻ�c���S������P����ʽ(2)��(4)��֪��q�S����c���Ӵ���D���Pϵ�飺
ʽ�У��ҡ���©��ϵ����
Tt�����D�ӕr�g������
����ʽ(11)���ɵã�
��k+l�r���D�ص��ڽo��ֵTe����ʽ(12)��ʽ(14)���xɢ����ã�
�ڴ�朷�ֵ�㶨��r�£�isd���ֺ㶨��H1��H2�鶨ֵ�������Ӵ�朷�ֵ�����������ȫ���֣���늙C�����S�h��׃�������D�ؿ��ƭh����H1Te+H2Te(k)����PI���������F�����͌�늙C�������^�yֵ����ه���D�ٺͶ��Ӵ���ɂ�������Ӌ�h���o�������B��r����o��ݔ�롣�ɲ��ֹ�ͬ���ɶ���q�S늉�����ʸ����ʹ��t�ܺõظ�ۙTe��
��������Ŀ��g늉�����ʸ������dq�������D�Q�h�����ó�sVM��������oֹ����ϵ�
���늉�ʸ����������׃���_�P��BS ab c��ֱ��ĸ��늉�V dc�Ͷ����������I ab c���@���oֹ����ϵ�µĶ���늉����������Ӌ��朷�ֵ������Ӌ�D��T e�����Ӵ�朽Ǧȵ����Ǻ���ֵ����ʽӋ�㣺  ����Matlah��Simulink����ܛ�����������gʸ�����ƵĮ���늄әCֱ���D�ؿ���ϵ�y����ģ�ͣ���D2��ʾ��늙C�y��ģ�K��simulink�Ԏ�ģ�K��ݔ��m�ɮ���늄әCֱ�ӫ@�ã�ݔ������dq�S��朦�qd,�D�әCе�D�٦�m���D��Tm�����ϵ�y�^�yݔ����
3����Y������
����Matlab��simulink����ܛ�������F������DTc��sVM���Ʋ��ԡ��������î���늄әCϵ�y�A�Oģ�ͣ��~������4 kw���~��늉�400v���~���l��50 Hz���~���D��1 430/mln���������1��405��������늸�5.839 mH���D�����1.395�����D��늸�5��839 mH������O��172 2 H���O������2���քe�ڂ��yֱ���D�ؿ��ƺ��M��ֱ���D�ؿ��Ƶķ���ϵ�y�У�����ؓ�d�D�����ӣ�O��2 s�r��ʩ��ؓ�d�D��20N��m��ֱ��ĸ��늉���800 V�����˷�����Ʋ����㷨�⣬�����l������һ�ӣ��M���_�����õı��^Ч����
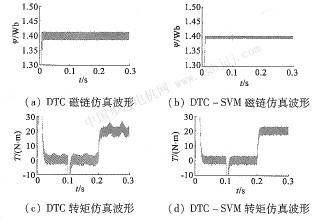
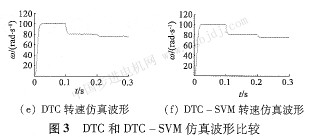
�D3�����DTc��DTc��sVM���ԵĴ�朷�ֵ���D�غ��D�ٷ��沨�Σ���朷�ֵ�o����l 4 wb��
��ʼ�D�ٽo����100rad��s��0.l s�r����80 rad��s��ϵ�y�ӑB푑��ஔ��DTc��sVM��Ч�pС�˶��Ӵ�机��D���}�ӡ�
4�Y�Z
���˜pС���yֱ���D�ؿ���ϵ�y�Ĵ�机��D���}�ӣ������ڷ�������늄әC���Wģ�͵Ļ��A�ϣ��Y�ϟo���ķ��������Å���늉�ʸ��Ӌ��ģ�K�Ϳ��g늉�ʸ���{��ģ�Kȡ�����h���^�����_�Pʸ���������M�D�ؿ��ƭh����PI������ݔ������ݔ���D�ص�q�S늉������͌��������^�yֵ����ه���D���c���Ӵ�朳˷e�DZ���늙C�D�ٺʹ�朞�o��ֵ�Ļ��A����sIMULJINK����h���½���ϵ�y����ģ�͡�����Y���������c���yֱ���D�ؿ���ϵ�y��ȣ��ڲ�Ӱ푄ӑB���ܵ���r�£���Ч�pС�˴�机��D���}�ӣ������OӋDTc��sVM�Į���늄әCֱ���D�ؿ��ƌ��Hϵ�y�ṩ����Ч�ķ������ߡ� 
|