һ�N��(sh��)�r���������(sh��)�ă�(y��u)��ʸ�����Ʒ���
��𨝍���K���x�������h
(�Ϻ�늙C(j��)�W(xu��)Ժ���Ϻ�200240)
ժҪ�������һ�N��(sh��)�r�����Б�(y��ng)늄әC(j��)ʸ�������н����(sh��)�ķ�������ʸ�����Ƶ�늉�����Ӌ(j��)���������˅���(sh��)����Ӌ(j��)�㣬ͨ�^�ɜy���ą���(sh��)ֵ�ƌ�(d��o)����늉�����(sh��)������(sh��)�r���£�ʸ�����ƵĽ����(sh��)�ܸ��S늄әC(j��)��(sh��)�H�\(y��n)�Ѕ���(sh��)��׃��������˽����Ч�á�����Y(ji��)������ԓ��������Ч�ġ�
�P(gu��n)�I�~��ʸ�����ƣ��Б�(y��ng)늄әC(j��)������������(sh��)����
�ЈD���̖��TM346 �īI(xi��n)��(bi��o)�R�a��A ���¾�̖��1004��7018(2008)05��0046��03
0����
�Б�(y��ng)늄әC(j��)�������늉�����ͨ��늴��D(zhu��n)�ص�׃�����ڏ�(f��)�s������P(gu��n)ϵ��ᘌ��@�����}���S��ʸ�����Ʋ��Ա���������������ڑ�(y��ng)���ж����ɱ���ش���늙C(j��)����(sh��)�������Լ������ƵȆ��}[6]�������ʸ�����Ʋ������Ի����D(zhu��n)�Ӵň�����(g��u)�ɵĿ���ϵ�y(t��ng)��鳣Ҋ�����Ŀɿ�늉�ģʽ���H���ڌ�(sh��)�F(xi��n)������ҿ��ƽY(ji��)��(g��u)������ڻ����D(zhu��n)�Ӵň������ʸ�����ƵĽ���Ӌ(j��)���У������(xi��ng)�ą���(sh��)�����Ǻ㶨ֵ�����nj�(sh��)�H�h(hu��n)���µ�늙C(j��)����(sh��)����׃������(d��o)�¶�������Ą�ŷ������D(zhu��n)�ط�������ϲ���****������������ϵ�y(t��ng)���ܡ�
ᘌ��@�����}���������һ�N��(y��u)��ʸ�����Ʒ���������(j��)�ɜy���ą���(sh��)ֵ�������늉���ͨ�^��(sh��)�r���������(sh��)��ʹ�ý���Ӌ(j��)����Ϯ�(d��ng)ǰ��늙C(j��)�\(y��n)�Р�B(t��i)����(sh��)�F(xi��n)������ϵ���ȫ������ͅ���(sh��)���Ќ��������ܵ�Ӱ푡������ͨ�^�������^�̵ķ����(y��n)�C��ԓ��������Ч�ԡ�
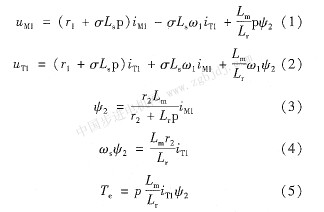
1�Б�(y��ng)늄әC(j��)��Чģ��
M-Tͬ�����D(zhu��n)����(bi��o)ϵ��,�Б�(y��ng)늄әC(j��)�Ĕ�(sh��)�W(xu��)ģ��[1]��������:
ʽ�У���1�鶨�Ӵň����D(zhu��n)�ٶȣ���s���D(zhu��n)����ٶȣ�P��Б�(y��ng)늄әC(j��)�O����(sh��)����2���D(zhu��n)�Ӵ�朡�
���]��늄әC(j��)�\(y��n)�Еr�ӑB(t��i)���ܵ�ӑՓ������늙C(j��)�τӹ�ʽ��
ʽ�У��Ҟ鶨��˲�g늸�ϵ��(sh��)��  �քe��늴��D(zhu��n)�غ�ؓ(f��)�d�D(zhu��n)�أ�P��O����(sh��)��J���D(zhu��n)�ӑT�����ɵ�M-Tͬ�����D(zhu��n)����(bi��o)ϵ�¸Б�(y��ng)늄әC(j��)�ĵ�Чģ�ͽY(ji��)��(g��u)����Dl��ʾ�� 2�����(sh��)�Č�(sh��)�r��������
�ɈD1��Ҋ,�Q���D(zhu��n)�Ӵ�朦�2��(w��n)�B(t��i)ֵ�Ą���������iM1�͛Q��늴��D(zhu��n)��Te��(w��n)�B(t��i)ֵ���D(zhu��n)���������iT1֮�g���ڽ������,��Ҫ����.ᘌ��@�����}��ǰ������˺ܶ�N������ϵĽ����㷨���猦�Ǿ�ꇽ������λ��ꇽ����ǰ�����ƽ�����������ƽ���ȣ��@Щ�����څ���(sh��)��׃����r�¶���ʮ����Ч�ؽ������늙C(j��)�\(y��n)�Еr�䅢��(sh��)����׃������(d��o)�½����㷨�a(ch��n)��ƫ�늙C(j��)�Ŀ�������Ҳ�ܵ�Ӱ푡�
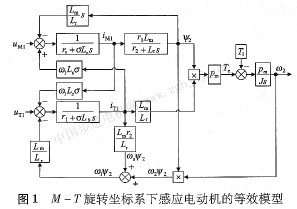
���������㷨��ʸ�����ƽ�������г�Ҋ�Ľ����㷨�������Б�(y��ng)늄әC(j��)��M��T�S����ķ���������늄әC(j��)����늉���Ӌ(j��)�㣬����������늙C(j��)����늉�ݔ����M(j��n)�ЯB���a(b��)�����@�N�����㷨�ǽ����ڶ�������������o���t���ͽ�������(xi��ng)�е�늙C(j��)�Ը�ϵ��(sh��)Ls��©��ϵ��(sh��)�ҵ�Ӌ(j��)�����ֵ�͌�(sh��)�Hֵ�߶��Ǻϻ��A(ch��)�ϵġ���(d��ng)늙C(j��)����(sh��)��׃�����\(y��n)���l�ʸ�׃�r������늉���Ӌ(j��)��ֵ�c��(sh��)�Hֵ֮�g�քe����ƫ��  �������_(d��)����ȫ����[7]�������Է�����������������(sh��)�rӋ(j��)���Ч�����(sh��)�ķ�������������ĽY(ji��)��(g��u)��D2��ʾ�� �tʽ(7)���ǽ����(xi��ng)������ʽ������(j��)�@����ʽ����늙C(j��)�y������(sh��)�ƌ�(d��o)��������(xi��ng)��ֵ���ڽ����㷨�Б�(y��ng)��ԓֵ����(sh��)�r������������(xi��ng)�Ĵ�С���t�ɱ��C����늉������c��(sh��)�H�\(y��n)�Ѕ���(sh��)ƥ�䡣��ʽ(7)�еĦ�1Ls��һ���˷���늉������㷨�У��Ì�(sh��)�r�������늉���ʽ�飺
ʽ�У�uM1��uT1��iM1��i1�Ǯ�(d��ng)ǰ�\(y��n)�Еr��M��T�S��늉����ֵ����ͨ�^�����Ӷ˿ɜy��������늉��������ʸ��׃�Q�����㵽M-T�S����(bi��o)�«@�á�������������ʽ(7)�������ڮ�(d��ng)ǰ늙C(j��)����(sh��)�µĽ�������(xi��ng)��1Ls��������ʽ(9)��ʽ(10)�î�(d��ng)ǰ�������늉�ֵ��������һ݆����ݔ�롣
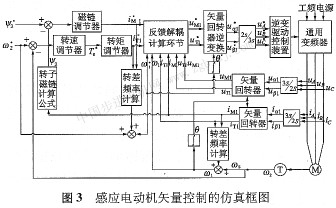
3����͌�(sh��)�(y��n)�Y(ji��)��
�Б�(y��ng)늄әC(j��)ʸ�����Ʒ����ķ����D��D3��ʾ������늄әC(j��)����늉�ֵ�����ֵ�͌�(sh��)�H�D(zhu��n)��ֵ��y������(sh��)���D(zhu��n)���O(sh��)�����D(zhu��n)�Ӵ�朞�o��ֵ��
�����ʼֵ�O(sh��)�����£�����늄әC(j��)����늉��������ʼֵ�քe�O(sh��)��220 v��3��8 A����(sh��)�H�D(zhu��n)�ٳ�ʼֵ��0���o���D(zhu��n)�Ӵ������ʼֵ�O(sh��)��0��05 H���o���D(zhu��n)�٦س�ʼֵ��314rad��s��
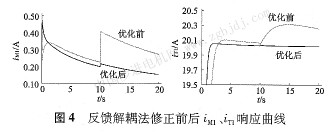
�\(y��n)���^����늄әC(j��)����(sh��)��׃���ǝu׃�ģ����Ǟ��˷��㌦�ȅ���(sh��)׃��ǰ��IJ�ͬ���҂����Å���(sh��)ͻ׃��ʽ��(zh��)�з��棬ʹ����Y(ji��)������ͻ������(sh��)��(sh��)�r�������������á��Б�(y��ng)늄әC(j��)���慢��(sh��)���1��ʾ��  ���ó�Ҏ(gu��)��������Ӌ(j��)���ʸ�������㷨�M(j��n)�з��棬�ó�����������ĵ�Ч���iM1��iT1푑�(y��ng)������D4��̓����ʾ�����Ì�(sh��)�r�������������(sh��)��ʸ�������㷨�M(j��n)�з��棬�ó���������ĵ�Ч���iM1��iT1푑�(y��ng)������D4���D5�Ќ�(sh��)����ʾ��
����푑�(y��ng)�������Կ�������׃�l�{(di��o)���У���(d��ng)늄әC(j��)����(sh��)�l(f��)����׃�������l�ʸ�׃��(d��o)��늙C(j��)��ͬ���D(zhu��n)�٦�1��ֵ��׃�r���������h(hu��n)��(ji��)�еĽ���늉���ʹ�ù̶��ą���(sh��)Ӌ(j��)�㣬ʸ������iM1��iT1�Ľ�����ܵ�Ӱ푡���(d��ng)���Ì�(sh��)�r���������(sh��)Ӌ(j��)���Ժ���׃�l�Լ�늙C(j��)�\(y��n)�Ѕ���(sh��)׃���^���Ќ�(sh��)�F(xi��n)�˄ӑB(t��i)ƥ�䣬�����Ч���������܅���(sh��)׃�����l��׃����Ӱ푣��M(j��n)һ����(y��u)����iM1��iT1�Ī�(d��)������ŷ������D(zhu��n)�ط������Ӱ��M(j��n)һ�����͡�
4�Y(ji��)�Z
����ᘌ�ʸ�������н��������늙C(j��)����(sh��)׃��Ӱ푵Ć��}����(y��u)���˽���Ӌ(j��)��h(hu��n)��(ji��)���ڳ�Ҏ(gu��)����Ӌ(j��)���м��댍(sh��)�r����(sh��)����Ӌ(j��)�㣬ʹ�����(xi��ng)����늙C(j��)��(sh��)�H�\(y��n)�Ѕ���(sh��)��ԓ�����O�õ������˅���(sh��)׃����ʸ�����ƾ��ȵ�Ӱ푡�ͨ�^�����C��(sh��)���ڷ�������Б�(y��ng)������Ӌ(j��)���������늙C(j��)����(sh��)׃��Ӱ푣���Q�˽����еą���(sh��)���І��}��
���ĵĄ�(chu��ng)���c(di��n)�ǣ����ÿɌ�(sh��)�r�y���ą���(sh��)���㽻������(xi��ng)���M(j��n)һ���������늉���ͨ�^��(sh��)�rӋ(j��)����£����C�����^�̲���늙C(j��)����(sh��)׃��Ӱ푡�
|