����DSP�pģ���Ƶij���늄әC�Դ
���m��fʥ�t
(���Ͻ�ͨ��W���Ĵ��ɶ�610031)
ժҪ���ij���늄әC�����Դ��Ҫ����l�������һ�N����DSP��PID FUZZY�pģ���Ʒ��������o�����c֮�����ij���늄әC�Դ���OӋ˼·����Ԕ���·��ԇ������ԓ�������R�����������B���Ⱥã������^��đ��Ãrֵ���ƏV�rֵ��
�P�I�~������늄әC��DSP��PID��FUZZY���pģ����
�ЈD���̖��TM35 �īI���R�a��A ���¾�̖��1004��7018(2008)05��0043��03
0����
���ڳ���늄әC�S���ضȡ��Դ늉���ؓ�d�D�غͶ��D��֮�g�o���������l����׃��������մɵ��C���l�ʕ��l��Ư�ƣ�ϵ�y�ʬF�߶ȷǾ��ԡ�늙C������ă���ʽ�Y��������֮�g���ڙC늅������C����Ч���IJ�ƽ���Ե�ԭ��ʹ�ó���늄әC�γ�һ�����s�Ķ�׃��������ϵĕr׃ϵ�y����˲��܉��þ��_�Ĕ��Wģ����ȫ���_����늄әC�ӑB�ͷ��B���ԣ�������늄әC�Դ������Ʒ������о������һ�����y�ȡ����ڴˣ����ďij���늄әC�����Դ��Ҫ����l�������һ�N����DSP���pģ���Ʒ��������o�����c֮�����ij���늄әC�Դ���OӋ˼·��ԇ������ԓ�������R�����������B���Ⱥã����кܴ�đ��ú��ƏV�rֵ��
1����늄әC�����Դ��Ҫ��
����늄әC����Ҫ�������c�ǽo��ʩ�Ӄ�����λ����һ���ǶȵĽ���늉������É���մɵ��扺�Ч����ʹ����մɰl���C���Ӷ��ӭhһ����ӣ���ͨ�^�����D��֮�g��Ħ�������D�����D�Kֱ���\�ӡ���늼����£�����늄әC���ӱ����γ������в����v�����ڲ���̎���|�c�����\���ٶ�V������ʽ��ʾ[1]��
ʽ�У��ء���������ӵĽ��l�ʣ�
�ȡ�����·ݔ����̖����λ�
B��A�����քe���·ݔ����̖�������
k���������в��IJ������ɉ���մɵĘO���^��ķֲ���r�_����
����ʽ���Կ���������̎���ٶȿ��ƿ���ͨ�^�����B��A����λ��ȣ����l��f(f����/2��)�팍�F����˳���늄әC���ȱ���܉�ʴ_��Ѹ�ٵy���������C���l��(�C���c��ֹһ��)��������ཻ��늉�����λ����ཻ��늉��ķ�ֵ���M������ϵ�yҪ���M���D���{����
���ڳ���늄әC�ăɽMͨ�Ի���һ�����ƵĽ���늣��Ү�ԓ��λ���ijһ�Ƕȕrݔ���D���_��****ֵ�����в��̓ɂ�����ԴҪ������/2�������v���ͳ���늄әC����(�e�ǿvŤ�ͺ���)�����ڿvŤ�����ڊA�Ķ����е�λ�ò�ͬ���vŤ��ӂ����ٶȲ�ͬ�����yͨ�^Ӌ��õ��vŤ��������̖��λ���Ա��C���ӱ����|�c�vŤ����������λ�ֻ��ͨ�^�yԇ�����õ������Գ����Դ�ă�·ݔ������̖���܉���0��180���������B�m���{��
���ڳ���늄әC�����C���B�¹����ģ���ͬ�ij���늄әC�����C���l�ʲ�ͬ����ʹ��ͬһ����늄әC���C���cҲ��ֹһ������һ���棬�S���ضȵ�׃�������C���l�ʱ���Ҳ������׃����һ�㳬��늄әC���C���l����20��100 kHz֮�g���ʳ���늄әC�Դ���l��ݔ��Ҫ��20��100kHz���҃����B�m���{��
���⣬�Ķ��D�ӽ��|��ĽǶȷ�������·��늉���횿��{����
�v������������늄әC�����Դ��Ҫ�����£�
(1)��·����̖��λO��180���B�m���{��
(2)��·����̖�ɷ����{�����Ը�׃�D��
(3)�l��ݔ��20��100 kHz�ȿ��{��
(4)���ӌ�����늄әC������ؓ�d����Ҫ���F�迹ƥ�䣻
(5)�����l�ʡ���λ�ԄӸ�ۙ���ܣ�
(6)��·��늉����{��
2����DsP�pģ���Ƶij���늄әC�Դ
2.1ϵ�y��D
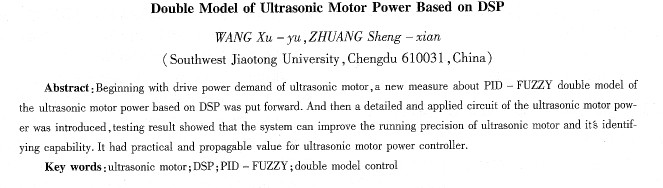
ϵ�y�M�ɻ�����D��D1��ʾ��
�z�y�h�������ٶșz�y��늉�������z�y���档�ٶșz�y���ù�늾��a�������IJ����L����һ��W�x���S���a��LFA-500A-18000С���}�_��늾��a�����������w�eС������С���ɿ��Ըߡ������L�ȃ��c��5V�Դ��һ��ݔ��18 000���}�_������M��T���y����늉��z�y������z�y������·�õ�����һ�������^���z�y���^���z�y��Ҳ���������늉�ֵ�Ĝy��������늄әC�ЃɷN��һ�N��s��(sTATus)������ɜy����Ӡ�B��׃����r���Ķ��õ���****�C���c����һ�NԪ5�ˣ����C���c�Ļ�·늉��ͻ�·������e�ԣ��҂���ͨ�^늉��z�y������z�yֵ�õ����C���c��
���ư�������ϵ�y���ơ����o�ĺ��ġ�
2��2����ϵ�y�OӋ
����ϵ�y������D2��ʾ���D2�У�ݔ����·늉���̖�������̖���^�ⲿ̎���·�M�ОV�������Ρ����x̎����һ·�M�뵽A��D�D�Q����A��D�D�Q������ADS7864оƬ�����һ12λ���D�Q�����ɈD4--����̎����TMS320F243�����D�Q�����_ʼ���D�Qݔ�����D�Qģʽ��A��D�D�Q�Y�����˵�HFOоƬ�С������̖sֱ�ӽ��^�ⲿ̎���·�M�ОV�������Ρ����x̎�����M�뵽A��D�D�Q�������ɹ�늾��a��ݔ����̖���}�_��̖����HcTL2032оƬ�V�������l��Ӌ���Y���Զ��M���γɏĿ���ݔ����DsP������߳���늄әC����ϵ�y�Ķ�λ���ȡ�
ϵ�y�����r��DsP�����l�ʡ���λ�ԄӸ�ۙ���g�������M���Ԅ��{��[2]��DsPݔ���l����̖�ɔ�������ݔ����D��A�D�Q��DAc0832��D��A�D�Q����늉���ʽ��ʾ��ݔ���l�ʵĴ�С����ݔ��늉��cDsPݔ���l�ʳ����ȣ����҂���Ҫ�����l����̖���ʲ�����һ�����lʽ���l׃�Q������cPLD���ܲ��l���l׃�Q����ݔ����̖����Ƀ����l�ʿ�����̖��
������cPLD��ɣ�cPLD���O�Ã�Ӌ������һ����������ʽӋ�����γ�һ���Դ�Ŀ�����̖����һ��Ӌ����������Ҫ��Ƕ���ǰһ������̖�Ļ��A�Ϯa�����ƣ��Ԯa����һ��Ŀ�����̖�����ɿ�����̖���l���ɲ��l���l׃�Q����ݔ����̖�Q�������a�����Ƶ����y�ԣ����]������늄әC�ԴҪ���l�ʷ�����20��100 kHz�ȿ��{�����Ա��IJ����l�ʷŴ��ԭ�����ڲ��l���l׃�Q���Ȍ�20��100kHz���l��ͬ��360���ɵ��l�ʷ�����7.2��36MHz���Ȳ��O�Ѓɂ���ʎ����һ����̶�l00MHz����ʎ������һ����107��2��136 MHz(���]���ضȌ��C���l�ʵ�Ӱ푣�����105��140 MHz)���@�ӣ���������ʽӋ�����γ�һ���Դ�Ŀ�����̖��Ӌ����ʽ��ÿӋ360�ƽ׃��һ�Σ���һ��������Ҫ��Ƕ���ǰһ������̖�Ļ��A�Ϯa�����Ƶ�Ӌ����ʽ���ɰ���������Ƕȳ�2���PϵӋ�����F���ơ�
��cPLD�a�����}�_��̖��������x���M��O��׃�������������O����̖׃�����p�O����̖�����·���칦���·ݔ����
2��3����DSP���pģ(PID��FuzzY)����
����ǰ���������֪��ϵ�y�茦�l�ʡ���λ���ٶȾ����F�]�h���ƣ������ڳ���늄әC�ķǾ������ԣ��҅����r׃����˺��y�������_�Ĕ��Wģ�͡�
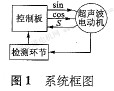
��Ҏ��PID(�������e�֡����{����)���^�̿����Б���****�����������һ�N���������������B�`��������������ƾ��ȸߣ�Ȼ����ҎPID���������ڷǾ��ԡ��r׃�ď��sϵ�y��ģ�Ͳ������ϵ�y���ܺܺõĿ��ƣ���PID�������������dz����y�����Ǹ����͟o������������ò����A�ڵ�Ч��[3]��ģ��������(FuzzY)�����`����`��׃������ݔ��������˾���ģ������-�ֿ������ã����@�Nģ������ϵ�y�ķ�������Ҳ�������˝M�⣻��һ����Ҫ���ģ���������ľ��Ⱥ�ۙ���ܣ��ͱ�회��Z��׃��ȡ������Z��ֵ�����֙nԽ�࣬����Խ�ã���ͬ�r������ȱ�c��Ҏ�t����ϵ�y��Ӌ����Ҳ������ӣ�����ģ������Ҏ�t���y���գ��{ԇ�������y���߲��ܝM�㌍�r���Ƶ�Ҫ��[4]��ᘌ�������r�����Č�PID�{������ģ���������ă��c�Y����������������DSP��PID-FuZZY�pģ���Ʒ�ʽ���@�N���Ʋ������ڴ�ƫ����Ȳ���ģ�����ƣ�Сƫ������D�Q��PID���ơ�
����DsP���pģ(PI-FuZZ5)���ƿ�D��D3��ʾ���D�У�Ym(k)��o���ٶȣ�Y(k)�錍�H�ٶȣ�
�ٶ�ƫ����e(k)=Ym(k)-Y(k)���ٶ�ƫ������׃
4�Y�Z
��ԇ�Y���������������Դ�OӋ�������\�пɿ��������ó�Ҏ��PID���ƕr�����{�����^�ɕr�g�L������ģ�����ƕr���ӑB푑��^���^��Ҏ�㷨Ҫ�죬���ڷ��B��r�·��B�`���^���h���ȅ����l��׃���r��ϵ�y����������PID��FuZZY�pģ���ƕr��ϵ�y�o���{�����B�`����㣬�^���^�̶̣����ܵ��_�ӕr����Ʒ�|׃����������Ҫԭ���ǣ������،���IJ�ͬ�r�ڲ��ò�ͬ�Ŀ����㷨������ϵ�y�Ⱦ������õķ��B���ܣ��־���ģ���������õĄӑB���ܼ������ԏ������c�����⡣�������ӵĴ�Сֱ���Pϵ��PIDģ�����Ƶ�ϵ�y���ԡ�����e(k)=e(k)-e(k-1)��u�������(�ٶ��{�����ϵ�늉�)��
����ģ���������Ŀ���Ҏ�tһ���_�����t�����������^���оͲ�����׃�������y�Կ˷�늙C�ٶ�����׃�����������ܵ�Ӱ푡�ᘌ��@�N��r��������ģ���������Ļ��A�ϣ�����һ����У���h��������****ƫ��r�g�e��(ITAE)��������ָ�ˣ���ϵ�y�����^���У�ͨ�^��������a��b���ھ��Ԍ����탞��ģ�������������F������Ҏ�t�����{�����_����߿���ϵ�yƷ�|��Ŀ�ġ�
3ԇ�Y��
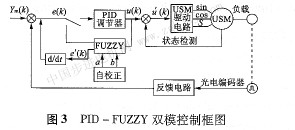
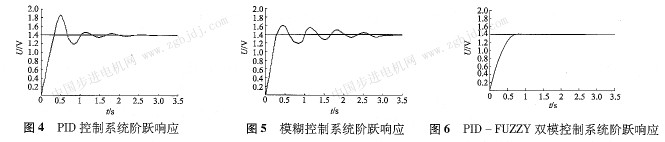
����C�·�OӋ�ĺ����Ժ�P1D��FuZZY�pģ�������Ŀ���Ч������ij�о������Ƶ�55CS01�ͳ���늄әC�M���˜yԇ���D4��Ϊ����ó�ҎPID���A�S푑��������D5����ÆΪ�ģ�����������A�S�������D6�����PID��Fuzz5�pģ�����������㷨����������
��֮������DSP��PID��FuZZY�pģ���Ƴ���늄әC�Դ�܉����õؿ��Ƴ���늄әC��ϵ�y���ȸߣ��ӑB���ܺã����B���ܸߣ������^��Č��Ãrֵ��
|