�����ȅ^(q��)�^�ɵ�����ͬ��늄�(d��ng)�C(j��)ֱ���D(zhu��n)�ؿ���
�ֺ�����(y��n)�l(w��i)������㑷壬�ǝ�
(�������I(y��)��W(xu��)���������710072)
ժҪ��������ֱ���D(zhu��n)�ؿ���(DTC)����ԭ����ᘌ�����ͬ��늄�(d��ng)�C(j��)ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)�ж��Ӵ�朽�(j��ng)�^�������ȅ^(q��)߅��r(sh��)ϵ�y(t��ng)�D(zhu��n)���}��(d��ng)�^��Ć��}������ɷN�������ȅ^(q��)�^�ɕr(sh��)�����D(zhu��n)���}��(d��ng)�ķ�����ƽ���ȅ^(q��)�^�ɷ����^�ȅ^(q��)�^�ɷ�������������ăɷN�����M(j��n)���˷����о������挍(sh��)�(y��n)�Y(ji��)�������ɷN����������Ч�pСϵ�y(t��ng)�ж��Ӵ��̎���ȅ^(q��)߅��r(sh��)���D(zhu��n)���}��(d��ng)��
�P(gu��n)�I�~������ͬ��늄�(d��ng)�C(j��)��ֱ���D(zhu��n)�ؿ��ƣ��ȅ^(q��)�^�ɣ��D(zhu��n)���}��(d��ng)
��Ȧ���̖(h��o)��TM341 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2008)05��0036��04
0����
�������ֱ���D(zhu��n)�ؿ���(���º��QDTC)�������ڌ�늙C(j��)����(sh��)��ه��С�����ƺ��Ρ��D(zhu��n)��푑�(y��ng)��̈́�(d��ng)�B(t��i)���ܺõȃ�(y��u)�c(di��n)�������ܵ�����(n��i)�ⱊ���W(xu��)�ߺ͌��ҵ��P(gu��n)ע��DTC�đ�(y��ng)�Ì���Ҳ������Į�������늙C(j��)��u���쵽����늙C(j��)��[1-2]���ڱ��ͬ���늙C(j��)�У�����ͬ��늄�(d��ng)�C(j��)���ڽY(ji��)��(g��u)���Ρ��\(y��n)�пɿ���Ч�ʸߵȃ�(y��u)��Խ��Խ�ܵ��˂����P(gu��n)ע���ѽ�(j��ng)�ЌW(xu��)�ߌ�DTC�ɹ���(y��ng)��������ͬ��늄�(d��ng)�C(j��)[3-5]����늙C(j��)�����о��I(l��ng)����Ҳ�ɞ����о����c(di��n)֮һ��
�mȻDTC�����кܶ���(y��u)�c(di��n)�������y(t��ng)��DTC���g(sh��)��(y��ng)��������ͬ��늄�(d��ng)�C(j��)�У���Ȼ��һЩ���}��Ҫ��Q�����D(zhu��n)���}��(d��ng)���}���о���һ��(g��)���c(di��n)����Ҏ(gu��)��DTC����Bang-Bang�xɢ��ֵ�Ĝ��h(hu��n)���ƌ�(d��o)���D(zhu��n)���}��(d��ng)���ң�����(n��i)��ܶ��W(xu��)�߶���������˺ܶ��[1-15]���īI(xi��n)[12]��ᘌ����y(t��ng)��DTC���Ʋ����е�늉�ʸ���x���������a(b��)��߅���ϵ�늉�ʸ���x����������������pС����������ȅ^(q��)�ГQ�r(sh��)������D(zhu��n)���}��(d��ng)�������ڷ������y(t��ng)����ͬ��늄�(d��ng)�C(j��)ֱ���D(zhu��n)�ؿ�����Փ�Ļ��A(ch��)�ϣ��M(j��n)һ����ԓ�����M(j��n)��������̽ӑ���l(f��)�F(xi��n)ԓ������������Ч�pС����������ȅ^(q��)�ГQ�r(sh��)���D(zhu��n)���}��(d��ng)���ɴ�����˃ɷN�������ȅ^(q��)�ГQ�r(sh��)��Ч���ƴ���D(zhu��n)���}��(d��ng)�ķ������о��Y(ji��)��������������ăɷN���������_(d��)���A(y��)��Ŀ�ġ�
1 DTC����ԭ��
��Ҏ(gu��)DTC�У����������늴��D(zhu��n)��Te��
ʽ�У�P��O����(sh��)��Ld��ֱ�S늸У�Lq�齻�S늸У��ؽǦĞ��D(zhu��n)�Ӵ�朦�f���c���Ӵ�朦�s�A�ǡ������[�Oʽ����ͬ��늄�(d��ng)�C(j��)��Ld=Lq=Ls���t��
��ʽ(2)֪������������ͬ��늄�(d��ng)�C(j��)���D(zhu��n)�Ӵ�朷�ֵһ����ֵ�������Ӵ�朷�ֵ|��s|�����~��ֵ��늴��D(zhu��n)��Te������sin �ġ���ͨ�^���ֶ��Ӵ�朷�ֵ�㶨����׃���Ӵ�����D(zhu��n)�ٶȺͷ���˲�r(sh��)�{(di��o)���D(zhu��n)�ؽǣ��Ɍ�(sh��)�F(xi��n)�D(zhu��n)�صĄ�(d��ng)�B(t��i)���ơ�
�����Ӵ�朵Ŀ��ƣ��ɵ��W(xu��)��M(j��n)��Depenbrok���ձ��W(xu��)��I Takahashi����Ķ��Ӵ��ģ�ͣ�
ʽ�У�is�鶨�������Vs�鶨��늉���Rs�鶨����衣���x늙C(j��)���ӳ�ʼ��朦�s0����(d��ng)���Զ������r(sh��)����ʽ(3)�����Ӵ�朦�s�ɱ�ʾ�飺
ʽ�У�i=l��2��3��4��5��6����ʽ(4)����֪�������Ӵ��?zh��n)�����s�Ķ��c(di��n)��������ʩ�ӵĿ��g늉�ʸ��Vs�ķ����\(y��n)��(d��ng)����s�ķ�ֵ���\(y��n)��(d��ng)������ٶȶ�����ͨ�^�x����m�Ŀ��g늉�ʸ��Vs�{(di��o)��(ji��)��
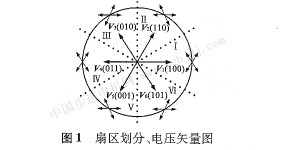
�D1�������月A�ȅ^(q��)���ּ�����(y��ng)�ȅ^(q��)늉�ʸ
���x��D�����Դ_��늉�ʸ���x��������l��ʾ��
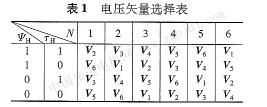
��1�У���H��TH�քe��ʾ��机��D(zhu��n)���h(hu��n)��������ݔ������(d��ng)��机��D(zhu��n)�صą���ֵ��s��Te�c��机��D(zhu��n)�صČ�(sh��)�Hֵ��s��Te�IJ�ֵ���ڜ��h(hu��n)���ȕr(sh��)�`���B(t��i)��l������Ҫ���Ӵ�朻��D(zhu��n)�أ���t��O������Ҫ�pС��朻��D(zhu��n)�ء�N������̎�ȅ^(q��)���ȅ^(q��)̖(h��o)��
2�ȅ^(q��)�^��
����Ҏ(gu��)����ͬ��늄�(d��ng)�C(j��)ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)�M(j��n)�н�ģ�����о����Y(ji��)�����������̎���ȅ^(q��)߅��̎�r(sh��)�����F(xi��n)�^����D(zhu��n)���}��(d��ng)�F(xi��n)���˽�Q�@һ���}�������[12]������ȅ^(q��)߅���σH�x���c�ȅ^(q��)߅�紹ֱ��늉�ʸ�����o�����a(b��)����߅���ϵ�늉�ʸ���x��������2��ʾ�����Ц�i���ȅ^(q��)߅��ĽǶȡ�
�������M(j��n)һ���о��аl(f��)�F(xi��n)������ϵ�y(t��ng)�\(y��n)���ٶȿ죬���ձ�l�M(j��n)��ʸ���x�����ȅ^(q��)߅���ГQ�c(di��n)̎�����ձ�2�a(b��)����߅���ϵ�늉�ʸ���x������Y(ji��)�����ȅ^(q��)��߅��̎��ϵ�y(t��ng)�D(zhu��n)���}��(d��ng)�^����������늉�ʸ���ȅ^(q��)�ГQ����F(xi��n)С���^����D(zhu��n)���}��(d��ng)�F(xi��n)���F(xi��n)�D(zhu��n)���}��(d��ng)����Ҫԭ��������ϵ�y(t��ng)푑�(y��ng)�^�죬��朽�(j��ng)�^��̎�r(sh��)���a(b��)���ʸ�����Õr(sh��)�g�ܶ̕������˕r(sh��)��ϵ�y(t��ng)�D(zhu��n)���}��(d��ng)���]�����@������Ч���������ȅ^(q��)߅���D(zhu��n)�Q�г��F(xi��n)���D(zhu��n)���}��(d��ng)���}�]�б��|(zh��)�ϵĸ��ƣ����ĔM���ȅ^(q��)߅��̎�O(sh��)�����T���^���ȅ^(q��)�Խ�Q�@һ���}��
2.1�ȅ^(q��)�^����Փ����
��ʽ(4)�xɢ����õ���
��s(n)=��s(n-1)+Vs(n-1)Ts (5)
ʽ�У�Ts��ɘ����ڡ��ٶ��˕r(sh��)�Ķ��Ӵ��?zh��n)����?SUB>s̎���ȅ^(q��)߅�總�������x��v���鶨�Ӵ���c늉�ʸ���ĊA�ǡ��D2��ʽ(5)�е�ʸ���P(gu��n)ϵ�D��
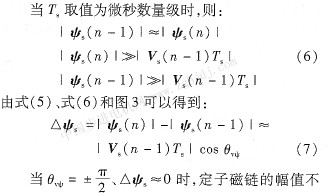
��(d��ng)Tsȡֵ���딵(sh��)����(j��)�r(sh��)���t��
׃��  �r(sh��)�����Ӵ�朵ķ�ֵ���ӣ�  �r(sh��)�����Ӵ�朵ķ�ֵ�pС�� ��ʽ(8)����֪������(d��ng)ϵ�y(t��ng)��(w��n)���\(y��n)�Еr(sh��)���D(zhu��n)�ؽǦı��ֲ�׃�����D(zhu��n)�ص�׃���c���Ӵ�朷�ֵ|��s|�����ȡ�
�C�ϣ���(d��ng)����늉�ʸ��us�c���Ӵ�朦�s��ֱ�r(sh��)�����Ӵ�朵ķ�ֵ��׃���D(zhu��n)�ز�׃�����D(zhu��n)��푑�(y��ng)��죻���ʩ�ӵĿ��g늉�ʸ����ǰ�ڶ��Ӵ�朻�����ڶ��Ӵ�朣����Ӵ�朵ķ�ֵ��׃��늙C(j��)�D(zhu��n)�،���(hu��)׃����
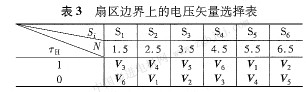
��(d��ng)���λ���ȅ^(q��)߅��r(sh��)��߅��̎�Ĵ�朌���(hu��)���ձ�1ʸ������ԭ�t��(qi��ng)�Ʒ������������ȅ^(q��)��(n��i)���S�C(j��)�x���늉�ʸ����(d��o)�����D(zhu��n)�غʹ�朵��}��(d��ng)����ˣ���(d��ng)���λ���ȅ^(q��)߅��r(sh��)��߅��̎�Ĵ�朷��䵽���T���ȅ^(q��)��(n��i)�����������ˌ���朏�(qi��ng)�Ʒ������R�����ȅ^(q��)����ɵ��D(zhu��n)���}��(d��ng)�^��Ć��}��
2��2����ķ���
����ᘌ��@һ���}�����ȅ^(q��)߅��̎�O(sh��)�����T���^���ȅ^(q��)�Ԍ�(sh��)�F(xi��n)������ȅ^(q��)߅��ƽ���^�ɣ�������ڴ����r(sh��)��D(zhu��n)��(d��ng)����r�µăɷN�ȅ^(q��)߅���ȅ^(q��)�^�ɷ�����
2��2 1ƽ���ȅ^(q��)�ГQ�^�ɷ�
���xȡ�ȅ^(q��)�^�ɕr(sh��)�����x���(g��)�ГQ�c(di��n)�������x���(g��)�ГQ�ȅ^(q��)�档�x���(bi��o)��(zh��n)�����ȅ^(q��)߅��錦�Q���ĵ�С�ȅ^(q��)����D3��ʾ�����x�^���ȅ^(q��)Si������D���Ӱ�^(q��)������
��i���ȅ^(q��)߅��ĽǶȣ��Ş��^���ȅ^(q��)�Ƕȡ�
���������^���ȅ^(q��)���ֵ�ԭ�t�����x�^���ȅ^(q��)����(y��ng)��늉�ʸ���x��������3��ʾ��늉�ʸ���x���ԭ�t�������ȝM������D(zhu��n)�ص���r�£��x���c�ȅ^(q��)߅�紹ֱ��늉�������
2��2.2�^�ȅ^(q��)�ГQ�^�ɷ�
�cƽ���ȅ^(q��)�ГQ�^�ɷ���ͬ�����xȡ�ȅ^(q��)�^�ɕr(sh��)�����ȅ^(q��)߅��錦�Q���Č�С�ȅ^(q��)�֞�ɂ�(g��)���ȅ^(q��)������r(sh��)ᘷ���ȡ�ڶ���(g��)�ȅ^(q��)���^���ȅ^(q��)���x��D4��ʾ����D���Ӱ�^(q��)�����Ц�i���ȅ^(q��)߅��ĽǶȣ��Ş��^���ȅ^(q��)�Ƕȡ�
�о��аl(f��)�F(xi��n)�����Ӵ�朽�(j��ng)�^�ȅ^(q��)߅����ϵ�y(t��ng)�D(zhu��n)���}��(d��ng)�^�ʲ�ȡ�^�ȅ^(q��)���x��������Ч�����D(zhu��n)���}��(d��ng)���ȅ^(q��)ʸ���x����c��3��ͬ��
3����Y(ji��)��
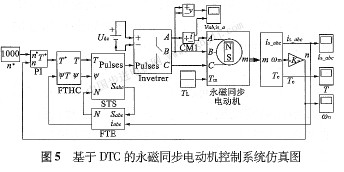
�����(y��n)�C���O(sh��)Ӌ(j��)�ɷN���������D(zhu��n)���}��(d��ng)��Ч��������(j��)����������ăɷN�ȅ^(q��)�^�Ƀ�(y��u)���㷨����Manab 6��5��simlink�н�������DTc���Ե�����ͬ��늄�(d��ng)�C(j��)����ϵ�y(t��ng)����ģ�ͣ���D5��ʾ��������Ҏ(gu��)DTc�ͱ�������ăɷN�����M(j��n)�з����о���
�ڷ����о��У��O(sh��)������ͬ��늄�(d��ng)�C(j��)늙C(j��)����(sh��)��ֱ��늉�Vdc=220 V�������@�M���R=2��875 ��������d���@�M늸�k=8��5 mH��q���@�M늸�Lq=8��5 H���D(zhu��n)�Ӵň���ͨ��=O.175 wb��ճ��Ħ��ϵ��(sh��)B=O���D(zhu��n)��(d��ng)�T��J=0��008 5 kg��m2���O����(sh��)p=4��
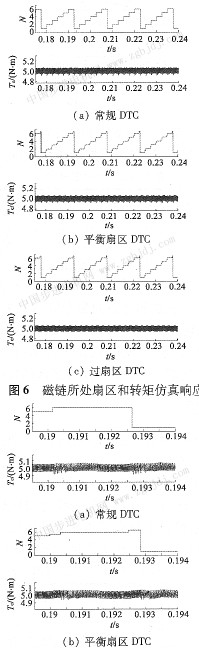
�O(sh��)���^���ȅ^(q��)�Ƕȴ�С��=4��2����ϵ�y(t��ng)��ؓ(f��)�d�D(zhu��n)��TL=5 N��m����(d��ng)������r(sh��)�g��t=0.3 s������Y(ji��)����D6��ʾ���D7�錦��(y��ng)���Ʒ�ʽ�µ��D(zhu��n)��푑�(y��ng)�Ŵ�D��
4�Y(ji��)�Z
���^���Ϸ��沨�Σ����Եó����½Y(ji��)Փ��
ƽ���ГQ�ȅ^(q��)�^�ɷ����^�ГQ�ȅ^(q��)�^�ɷ������^�õ�����ϵ�y(t��ng)�D(zhu��n)���}��(d��ng)�����x����ͬ�Ƕȴ�С���^���ȅ^(q��)����r�£��^�ГQ�ȅ^(q��)�^���^ƽ���ГQ�ȅ^(q��)�^�ɷ�����Ч���^�á��^�ȅ^(q��)�ГQ�^�ɷ����^�õ������ȅ^(q��)ϵ�y(t��ng)�г��F(xi��n)�IJ����D(zhu��n)���}��(d��ng)�������nj��ȅ^(q��)�Q�����D(zhu��n)���}��(d��ng)�������Ч���^�ã��������������ȅ^(q��)߅���ГQ��ļ�̣���(sh��)�F(xi��n)�˱�������ăɷN��(y��u)��������Ŀ�ġ�
ֵ��ע����ǣ��^���ȅ^(q��)�ǶȲ����x���^��t��(hu��)�a(ch��n)���^���D(zhu��n)���}��(d��ng)����ʹ��月A�l(f��)����׃��
|