�߂�W�����ܵ�늄Ӱ�Ħ�ο���ϵ�y������
���������_����
(�V�|���I��W�C늹��̌WԺ���V��510090)
ժҪ���������늄Ӱ�Ħ�εIJ��������ԺͰ�ȫ�ԣ��о��˰�Ħ�ο���ϵ�y����Ӳ���ϲ��û��i�·�����C���·ϵ�y�İ�ȫ�ԣ���ܛ���ό��F�˰�푑��r�g���늙C����ϵ�y���ṩ�ԄӰ�Ħ�͂��Ի���Ħ��ģʽ����ͨ�^����͏�ԭ�Ñ��O���Ă��Ի���Ħģʽ�����F��Ħ�εČW�����ܡ�����Petri�W��ԓ����ϵ�y�M�н�ģ�ͷ������Ա��C��Ҫ���F�Ĺ���֮�g�]�����i�͛_ͻ��ԓ����ϵ�y�ѽ��������еĮaƷ�У��@�����Ñ��ĺ��u��
�P�I�~��늄Ӱ�Ħ�Σ�����ϵ�y���W�����ܣ�Petri�W
�Ї����̖��TM33 �īI���R�a��A ���¾�̖��1004��7018(2008)04��0038��04
0����
�S���҇�������Ѹ�ٰlչ���˂�����ˮƽ�IJ�����ߣ�늄Ӱ�Ħ��Խ��Խ�ܵ��Ěgӭ��Ŀǰ����늄Ӱ�Ħ���Ј��ϣ��M�ڡ����Y�Լ����a�aƷ���档�������ԣ��M�ڮaƷ������Ħ��ʽ�S�������^��������ͬ�r��r��Ҳ�dz����F�������ȮaƷ�����^���Σ��aƷ֪����Ҳ�����^�ͣ�������r����^������
�������늄Ӱ�Ħ�����Ј��ϵĸ��������������о���һ�������аl���Йn늄Ӱ�Ħ�εĿ���ϵ�y��ԓ����ϵ�y�����һ��늄Ӱ�Ħ�ε��ԄӰ�Ħģʽ�Ͷ��c��Ħģʽ�������ӌW�������Ԍ��F�ͱ����Ñ��Ի��ԄӰ�Ħģʽ��
�����Ƚ�B�W�����ܵĸ����Փ������ϵ�y��Ӳ��ϵ�y��ܛ��ϵ�y��Ȼ���ٽY��Ӳ��ϵ�y��ܛ��ϵ�y��B�W�����ܵČ��F��
1�W�������f��
��Ħ�ε��ԄӰ�Ħģʽ���H���ǰ��r�g��������������@����늄әCģ�K�ӿڵ��O�ü��ϣ����̻��ڳ�����Ñ����ܸ�׃���������c��Ħģʽ���Ñ����Լ�����Ը�x��Ħ�ַ���
����ÿ���˵��������c�������w�Y���������w�ص��Dz�һ�ӵģ����ڰ�Ħ�ַ������ȵȵĸ��ܾͲ�һ�ӣ��ԄӰ�Ħģʽ���y�M�������Ñ�����Ҫ�������c��ĦģʽҪ���Ñ�ÿ�ζ�Ҫ�x��Ħ�ַ������@�韩�������Ħ���܉W�����Ñ��İ�Ħ�ַ����γ�һ�ׂ��Ի��İ�Ħ���̲����������ṩ�o�Ñ����Ժ�ʹ�ã������ԄӰ�Ħģʽ�ķ������ж��c��Ħģʽ��������o�ɕ�����Ñ��ĝM��ȣ���߮aƷ���Ј�����������
���F�W�����ܵļ��g·���ǣ����Ñ��x���Ի��ԄӰ�Ħ�����O���r��ϵ�y���r�g������Ό��Ñ��İ��I��Ϣ�����������Ñ��x���Ի��ԄӰ�Ħģʽ�M�а�Ħ�r��ϵ�y���r�g�������ģ�M�l���@Щ��Ϣ����ԭ�@Щ�����Ϳ��ơ�����ϵ�y߀�����ˌ��@Щ��Ϣ�Ąh�����{���ȹ��ܣ���߲���������Ѻ��ԡ�
2Ӳ��ϵ�y���OӋ
2��1Ӳ��ϵ�y�ĽM��
����ϵ�y��Ҫ������Mcu���Դģ�K��I2c�ӿڵ�E2PROM��Һ�������o���b��ģ�K���I�Pݔ���ֿذ塢ֱ��늄әC���·�ȡ�Mcu����PIC16F77��Ƭ�C���@�N��Ƭ�C���гɱ��͡������S�������ɔ_�������ȃ��ݶ��V������늄әC����ϵ�y��E2PROM�Á������Ñ�ݔ�����Ϣ������PICl6F74��Ƭ�C�Ȳ�������I2c��SPI�·���ӿڷ��㡣
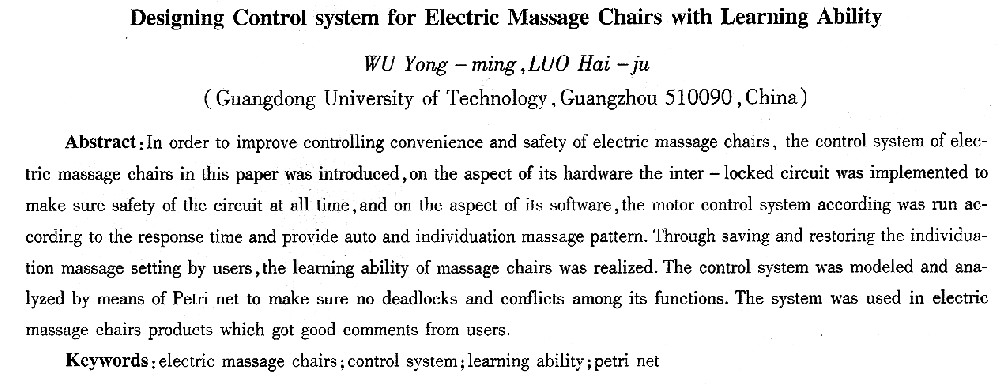
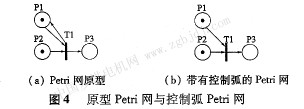
ֱ��늄әC��MOsFET�ܘ��ɘ�ʽ�·�ӣ����F�����D����MOsFET����IR2110���ӣ�ԓ�·���췀��[2]�������ڱ��aƷ�ϱ��^���m����D1��ʾ��
2��2Ӳ��ϵ�y�Ĺ���ԭ��
����ϵ�y�������Ӳ��ܛ���ij�ʼ����Ȼ������I�P��ݔ�룬�����I�a�O����ģ�K�ӿڣ���ɸ��N���ܡ�ܛ���O���˸���늄әC���B�m�\�Еr�g���ó��^15 min����ʹ�Ñ���ӛ�P�]��Ħ�Σ�ϵ�yҲ�܌���Ħ���P�]�Ա���ȫ��
ֱ��늄әC��PWM�M���ӡ��Æ�Ƭ�C��һ���r�g���r���a��һ����λ�}����Ȼ���ö���Ӌ�����팦�@���}���M��Ӌ�����քe�a������PWM�Ӷ���늄әC��ͨ�^��׃Ӌ�����ķ�������׃PWM���}�������F늄әC���{�١��ɈD1��֪���}�_��LEFTݔ��r��Q2��Q3��ֹ��Q1��Q4��ͨ�����F���D���}�_��RIGt��ݔ��r��Ql��Q4��ֹ��Q2��Q3��ͨ�����F���D��
2��3Ӳ��ϵ�y�İ�ȫ��ʩ
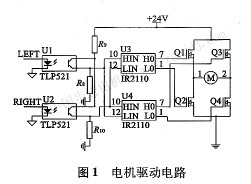
���Ӵ���ֱ��늄әC�r�������İ�ȫ�Ժ���Ҫ������IR2110���·�ı��o��ʩ���ܶ��īI�ѽ���Փ��[2-3]���ڌ��H�����У������ܵ��ɔ_���³���̎��һ��δ֪��B��ʹLEFT��RIGHTͬ�r����ƽ������LEFT��RIGHT�M���ГQ�r�r�g�ӕr�^�̵ȣ�������������MOSFET�ܵğ����������ϵ�y��������D2��ʾ�Ļ��i�·��R1��C1��Dl��D2�M�ɾ��_�·����Direction�ɸ��ƽ����ƽ�D�Q�r��C1��R1��늣�X2A��ֹͣݔ�����^һ�Εr�g��x1A����ݔ������Direction�ɵ��ƽ����ƽ�D�Q�r��c1ͨ�^R1��늣�XlA��ֹͣݔ�����^һ�Εr�g��x2A����ݔ�����ڌ��H�����У�ܛ���Ȱ�Mo-torPulse�Þ���ƽ�����ГQDirection�Ġ�B�����i�·��Q��H���п���ͬ�r��ͨ�Ć��}�����C��늙C���·�İ�ȫ�ɿ���
3ܛ��ϵ�y���OӋ
3��1ܛ�������w�ܘ�
��Ħ�ַ��Č��F���H���nj��@Щ늄әC����ͣ�����١��c�ӡ�׃�١��Q��ȿ��ƹ��ܵĽM�ϡ����F�W�����ܣ�ϵ�y����Ҫ���C���c��һ�Ƕ���늄әC�܉��й�������ϵ�y��������푑��r�gҪ�̣������O���ĸ��N늙C���ƹ������\�еĕr���ڛ_ͻ��
��ģ�K���й����Č��F��һ�㷽�����Ȍ�Ƕ��ʽ���r����ϵ�y��ֲ����Ƭ�C��Ȼ���_�ٶ����΄Ձ���������ģ�K���\�С�Ŀǰ���еĶ��΄Ն�Ƭ�C���r����ϵ�y�����϶�ͨ�^��׃��Ƭ�C�ij���Ӌ����(Pc)���M���΄��{�ȣ�ͬ�r��Ҫ���^��ї��팍�F������uc��Os��VxWorks��uc��Linux�ȡ�����PIcϵ�еĆ�Ƭ�C��Pc�Ͷї����ԣ��@Щϵ�y�����܄��Σ����PIc��Ƭ�C���һ�����΄յĿ����^���ǽ�Q�ˆ��}���P�I���ڡ�
�����ڂ��y�����^�̵ľ��̷����������������һ�N�Ľ�Q���������ȣ�����ϵ�y��ܛ���ܘ��֞�ǰ�_�\�еij���ͺ��_�\�еij���ǰ�_ؓ؟���΄��У������I�a��ɸ��N���ܵ��{�ú��ԄӰ�Ħ���̡����c��Ħ���߂��Ի��ԄӰ�Ħ���̵Ȍ�ģ�K�ӿڵ��O�ã����_ؓ؟���ģ�K���ӡ��ں��_�����ð�����ϵ�y�Č��w���������Iģ�K������늄әC��ģ�K������늄әC��ģ�K���N��늄әC��ģ�K���惦ģ�K�ȡ���Σ�������늄әC�Ŀ��ƞ��������ư����\�Еr�g���\���ٶȡ��Ƿ���ԓQ�Q��r�g�ȣ�����������һ��늄әC����ϵ�y���@��늙C����ϵ�y�ṩ����ӿڣ����������܉�ͨ�^�@���ӿڵą������늄әC�IJ������������P���@Щ���ܵČ��F��
3��2ģ�K�Ľ���
���@Щģ�K�Ĺ��ܘ��ɵķ�����֪��ÿ��ģ�K����һЩ�ӹ��ܣ���ЩҪ��ϵ�y��푑��r�g���^�̣���ЩҪ����^�L��������߿���ϵ�y�Č��r�ԣ�ϵ�y�����˰�푑��r�gҪ���@Щ�����M�з�����քeȥ��ɣ����_�������΄��\�е�Ч�����Q��֮������һЩҪ�r�Ա��^�ߵĹ��ܣ�����ϵ�y���������ĕr�gȥ�\��������
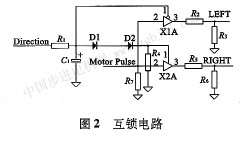
�ڴ��a�M���ϣ����ȱ��C��ѭ�h������ʲô��r��ÿѭ�hһ���õĕr�g�����^lO ms����Σ�ÿ��ģ�K���ո����ӹ��܌��HҪ���푑��r�g�O���ӹ��ܵĒ���r�g�����˜p�ن�Ƭ�C�ăȴ����ģ�һ������֞�4���ȼ���������늄әC�Ŀ��ƞ��������O���ɂ��ȼ���Tc�ӹ�����ÿ100 ms����һ�εģ�Tc����\�п��r�g�ıO�أ�Mc�ӹ�����������ÿѭ�hһ�Β���һ�Σ������������ӹ��ܡ����A�O�ٶ��\�й��ܡ��Q���ܡ�ֹͣ���ܣ���D3��ʾ���ɴ˿�Ҋ��늄әC�ēQ���ܡ�ֹͣ���ܵ�푑��r�g���tҲ�����������һ�ܵĕr�g�����Ҳ��lO ms�ȣ�늄әC���O������С�\�п��r�g��100ms��ԇ��C�������\���У�ϵ�y������ģ�K��푑��r�g�����A�O�ķ����ȡ�
3��3늙Cģ�͵���C
�ڱ���ģ�K�У�늄әC�Ŀ���ģ�������Ҫ�����˹�ʡƪ��������ֻ������늄әC��ģ���M��ģ�M��C�������܌�늄әC����ģ���M�ЄӑBģ�M�Լ��˽�늙C�\�Р�r����������һ�N��ģ���ߣ�Petri�W�����ǻ�����Ϣ��ģ�͵ģ��e�m���������������l���_ͻ���YԴ�����ȬF�������H�Ї���Ĕ��W���A���и��N������������ϵ�y�����M�з�������ʽ��
��C��������ֱ�^�ĈD�α�ʾ���������⣬�Dz�֪ͬ�R�������̼��g�ˆT�g��һ�N����ͬ�Z�ԡ������IJ���Petri�W��늄әC�Ŀ����M�н�ģ������˽�늄әC���\�Р�B���Д�늄әC�ĸ��N�����Ƿ�������i�͛_ͻ��
������늄әC�Ŀ��ƞ�������Petri�Wģ�ͣ������Ķ��x����Petri�W��ԭ��[4]����ԭ�͵Ļ��A�ϣ����xһ�N���ƻ���
���У�(S x T)cF����ʾ��ֵ��O�ę�ֵ��������Peti�W�ϣ�����ʼ���AȦĩ�ˎ����^�Ļ���ʾ����D4b��ʾ��(P1��T1)��
�@�NCW(s��t)=O�Ļ������������x�ǣ���ijһ׃�wt��s���ct��׃�w������s��token���]�аl��׃������D4b��ʾ�����@Ȼ���D4a�͈D4b��T1�l���ėl���ͽY���ǵȃr�ģ��@�N���п��ƻ���Petri�W�ڹ����ϵȃr��Petri5�Wԭ�͡���ˣ������\��Petri�W��һЩ����ԭ���ͷ��������Дཨ��ģ�͵����|�������ƻ���Petri�W�����˿��������ӣ����Ҍ��c��֮�g��tokert������ͬ�YԴ��Petri�W�Ĺ��ܣ�����늄әC����ģ�͵ķ�����
�ں��뼉���е��ӹ���McҪ���F��늄әC���ƹ����У�
(1)����늄әC����˲�g��Ҫ���^���ʣ�̎�������A��P3��
(2)늄әC���A�O�ٶ��\�еĠ�BP4��
(3)����늄әC�ēQ���·�ě_�����^���ڿ�������ֹͣ늙C��ʮ������ٓQ���Ԝp�ٛ_����̎���g϶ֹͣ�Q���BP5��
(4)ֹͣ��BP6��
���뼉����Tc�Ĺ����У�
(1)Ӌ������늄әC�\�еĿ��r�gP2��
(2)�\�Еr�g�Y����BP1��
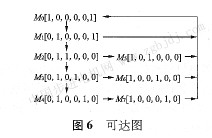
��ϵ�y��늕r��늄әC�ij�ʼ�B��ֹͣ��B��Pl��P6��token����M0={l��0��O��O��O��1}���t����늄әC���Ƶ�Petri�Wģ����D5��ʾ��
������һ��׃�wT�����п��ܰl��������@�ǂ����Petri�W��������һ���н�İ�ȫ�W��Ҳ�����f��늄әC�\�е�ÿһ����B���ǿ��_�ģ����������i����r��
��T1�l����P2����token��T3�l����Ȼ��T4��T5��T6��ѭ�h�l����늙C�����\�С���T2�l����Pl����token����ôT7��T8��T9������֮һ�l����늄әCֹͣ��Ҳ�����fT1��T2���� T3���ĵİl��׃�w���_�P����ܛ����̎�����棬Mc��Tc��token��������Ϣ�Dz�ͬ�ġ�P2���token����һ���r�gӋ��������Tcÿ������һ�Σ��@��Ӌ�����ͱ��p100ms���O�Õr�g��ʼֵ�Ϳ��Կ���늄әC���\�ӕr�g����P2��ĕr�gӋ��������O�r��T2�l����Pl��token��늄әC���κΠ�B�¶��M��ֹͣ��B���ȴ���һ�����ӡ�P3��P4��P5�����tokenҲ����һ���r�gӋ������ֻ���^Mcÿ����һ�Σ�Ӌ�����pһ�����ĕr�g�p�ٴ�slO ms��
4�W�����ܵČ��F
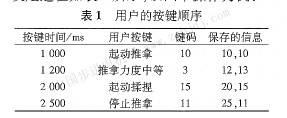
��ǰ���B��Ӳ��ϵ�y��ܛ��ϵ�y���A�ϣ�������Ҫ��B���F�W�����ܵ����̡����ȣ��Ñ����W�������I�M��W����B��ϵ�y������늄әC������늄әC������늄әC��λ����Һ���@ʾ������ʾ�£��Ñ��_ʼ���I�O�����N��Ħ�ַ����@�r���xһ��Ӌ�r�����_ʼ��100 ms���λӛ��Ñ��İ��I�������Ñ��O���^�����1��ʾ�����Ă���������
�ڵ�1 s�r���Ñ����������I�_ʼ���ã����r�g����ڵ�һ����Ϣ�����10�������I���I�a10���浽E2PROM���Ñ������������I������Ҳһ������ӛ���,���1�б������Ϣ�����O�����^���У��Ñ��п��ܮa���`�������ߌ����O���İ�Ħ�ַ����M�⣬���ϵ�y�ṩ�ˌ��@Щ��Ϣ�Ąh�����{���ȹ��ܡ�
���Ñ��{�Â��Ի��ԄӰ�Ħģʽ�r��ϵ�y��������E2PROM�ĵ�һ����Ϣ�x�������ڱ��^����Ȼ������һ����100ms���λ��Ӌ�r������Ӌ�r�����ӵ��c���^����ƥ��ĕr�g���I�a�xֵ�o�I�Pģ�K�Ľӿڣ����I�Pģ�K���늄әCģ�K���O�á�Ȼ���xȡ�ڶ�����Ϣ���ڱ��^�����ȴ�������һ��������Ի��ԄӰ�Ħģ�K������ģ�K����ƣ�����ÿ100ms����һ�Σ���D3��ʾ�����箔Ӌ�r����O���ӵ�10�r���l�F��ƥ��ĕr�g�������������ù��ܡ�����x������Ϣ���㣬�t��ʾ��Ħ���̽Y�����˳����Ի��ԄӰ�Ħģʽ��
5�Y�Z
�����о��İ�Ħ�ο���ϵ�y����ܛ�����棬�ṩ�����N��Ħģʽ�������F�ˌW�����ܣ����Nģ�Kͨ�^�ӿ��M����Ϣ���Q��ģ�K֮�g��ϳ̶ȵͣ�늄әC�\�Еr�Ġ�Bͨ�^Petri�W�M����ģ�M���ǰ�ȫ���]�Л_ͻ�ģ���ʹ���Ñ������O�ð�Ħ���ܣ�늄әC����һһ���F����Ӳ�����棬늄әC���Ӳ����˻��i�·����ʹ�Ñ��ں̵ܶĕr�g�O��늄әC�ēQ���c
�ӵȲ�����Ҳ�ܱ��C늄әC�������İ�ȫ�ԡ�ԓϵ�y�ѽ��\���ڌ��H��Ħ�ήaƷ�ϣ��߂䂀�Ի��ԄӰ�Ħ���ܵİ�Ħ��Ͷ���Ј����ܵ������M�ߵ�һ�º��u�����Ҫ���Ĺ����ǣ����Ñ��ճ�ʹ�ð�Ħ�ε��^���У���������ģ���㷨ӛ��Ñ���ݔ�룬�����W�����ܵ��O�����Ԅӽ������Ի��ԄӰ�Ħģʽ��
|