���������`���ֵĿ���ϵ�y�о�
�������R����Ѧ�
(�������պ����W������100083)
ժҪ��BHG��l���`������һ�N����ȫ����ָ�����`���֣������ϵ�y��Ҫ����λPc�C����λǶ��ʽ�������M�ɣ�ͨ�^RS232�M���ͨӍ����������λPc�C���ƽ��棬���F���ƅ�����ݔ�롢�{���͂�������Ϣ�Č��r����������TMS320LF2607A�OӋ���`���ֵ�Ƕ��ʽ������������Ӳ���·�ĸ���ģ�K����Ԕ���Ľ�B�������`���ֵ�ֱ���ŷ�늄әC�M���ٶȺ�λ�õ�PID���ƣ�������`���ֵ�ץȡ���ܡ�ԇ��C��ԓϵ�y�ܿɿ��\�в��_���A�ڵ�Ŀ�ˡ�
�P�I�~���`���֣�DSP��ֱ���ŷ�늄әC��PID
�ЈD���̖��TM383��4 1 �īI���R�a��A ���¾�̖��1004-7018(2008)04��0035��03
 0�� �� ��ָ�`��������һ�N�M�˻����܌��F�`������ęC����ĩ�˲������،��˙C���˵đ����I�����������ɶ��^�����¿��Ʊ��^���s���ɱ��^�ߣ�Ŀǰֻ�ܑ����ڌ�����A�Σ�δ����������a�еõ��V�����á�����OӋ���ƺ��Ρ�������ɷ���ץȡ���w�ȔM�˄������`���־�����Ҫ�ĬF�����x�͑��Ãrֵ��������ϵ�y���`���ֵ���Ҫ�M�ɲ��֣����`�������Ҫ���������Ҫ���C���`���ֵĿ���ϵ�y��Ҫ������֪ϵ�y�������ɼ�̎��ϵ�y����ϵ�y���˙C�����Լ�����һЩ�b�á�
1�����
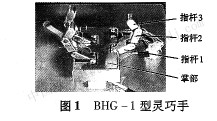
�����о���BHGһ1��ȫ�ӆ����ɶ��`����[1]��������ȫ��ͬ����ָ�M�ɣ���DI��ʾ��������ָ���Ʋ��ʽ��e���Q���ã�ÿ����ָ������ָ�U��ָ�U֮�g�������Cе��ϣ�ͨ�^䓽z�M�Ђ��ӣ��p���˽Y���ď��s�ԣ�������ָ��һ��Ƕ�������е�ֱ���ŷ�늙C�M���ӣ������F�˸�����ָ���ӣ�ÿ����ָ�ĵڶ��͵���ָ�U���b�ДUɢ���c���|�����������ɼ�ָ�U������Ϣ��ԓ�`���֏ĽY���c������ģ�������ֵ�Ĵָ��ʳָ����ָ���Ɍ��F��һ���ߴ緶�������w�İ��jץ�֣��������ɶ��١��Y�����Ρ�����ϵ�y�������Ρ��ɱ��͵ȃ��c��
2����ϵ�y�Ŀ��w�OӋ
BHG-1���`�������w���j��܉�E�M�ЊA�֣��nj��A�ַ�ʽ�ćLԇ�������ϵ�y��D2��ʾ����Ҫ������λPc�C����λǶ��ʽ�������� 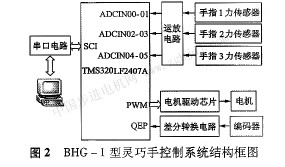 ��λ�Cͨ�^���ڰl�͊A�o�����_����������O��ֵ����λ�`���ֿ��������������M�Ќ��r�O�أ����F�˙C��Ԓ����λ������������������ָ������
��λ����������늙C���ÿ��ƣ�DSPоƬTMS320LF407A����ģ���Ҫ��Ɍ��������������M�вɘӣ���늙C�M���ŷ����ƣ��Լ�����λ�C�����N���ƅ�����TMS320LF2407A�e�m����늙C���ƣ����¼����������з֞�ʮ�ȃ��ȼ���40���Д࣬���еķǷ���ַ�L���Д����ڳ������w������r��λоƬ��PWM���i�Д��܉���늙C���Ʈ�������r�·��iPwMݔ�������C��ϵ�y������̎���Č��r��[2]��DsPоƬ���ɵ��@Щ���ܴ������������ϵ�y���OӋ��
2��1�˙C��������
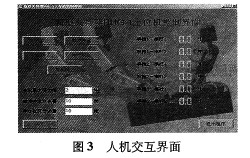
ͨ�^��λPC�C�ϵ��˙C�������������ɸ��N���ƅ�����ݔ����{������������������Ϣ�M�Ќ��r�O�y����D3��ʾ���˽�����������֣������^������λ�C�l����������O�Å^���O����λ�C�Ŀ��ƅ������@ʾ�^���@ʾ������λ�C�Į�ǰ��Ϣ��ԓ��λ�C����Ľ������^���������Σ�����Ч�ʸߡ�
2.2��������ͨӍ�·
TMS320LF407A�Ȳ����ɵĴ���ͨ�Žӿ�scIģ�K��һ���˜ʵ�ͨ�î������գ��l��(uART)ͨ�Žӿڣ���scITXD(�l��ݔ��)��scIRXD(����ݔ��)�ɂ��ⲿ���_������̖�ƽ��TTL�͡���Pc�C���ڵĮ�������ͨ�Ż��ڣ�RS232C�˜ʣ����ߵ���̖߉�ƽ��һ�£�����x��MAX232оƬ�M���ƽƥ�䡣ԓоƬ�ЃɌ��գ��l��Ԫ�����FDSP�cPC֮�g�Ĵ���ͨ��ֻ��һ���գ��l��Ԫ���ɡ����ĵĴ����·���������ƽӷ�����D4��ʾ�����D������ͨӍ�Ӿ��D�ء����Ք����Ͱl�͔������_���B��
2��3늙C���·
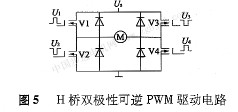
늙C������PWM�}���{����̖�팍�F��ͨ�^�O��DSP�Ķ��r��Timerl��TlPER�Լ��cT1CMPR�a��PWM��̖��Tl CMPR�cT1PER��ֵ����PWM���ε�ռ�ձȡ�PwM��̖Ҫ�����ŷ�늙C���M���}�_���䣬����늉����}��׃�Q����̖�M���m����߉׃�Q������o���O���·�ԝM�㹦���D�Q�·������ʽ��ͨ�������ࡱ�r����}�_늉������IJ���늙C��оƬMc33186���F늙C���p�O�Կ����ӣ�����һ��PWM���ڃȣ�늙C늘е�늉�����ؓ׃����Mc33186��H��������[3]����D5��ʾ���乤��늉�������5��28 V�������l�ʿ��_20 kHz�������^�ر��o����·���o��Ƿ��ʧЧ���ܡ�
2��4�ٶȡ�λ�Ùz�y��·
�҂�����Maxon��˾��MR���a������늙C���D�ٺ�λ�Ùz�yԪ������ݔ����·�}�_��̖A��B��I��ÿ����ò��ݔ����ʽ����A���}�_�֞�A+��A-ݔ������λ��180����B��IҲ��ͬ��ݔ����̖�cӆTTL�ƽ���ݡ������a���a���}�_��̖�r��ͨ�^�z�yA��B�ɂ��}�_���е��Ⱥ������_��늙C�����D����늙C�Ľ�λ�ú��D�ٷքe�����}�_�����}�_�l
�ʁ��_����
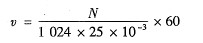
���]�h�ŷ�����ϵ�y�У������}�_����y���D�ٵķ�����M����T���Լ�M/T�����N��M���m���ڸ��ٜy�����ϣ�����҂��x��M���y���D�٣����yȡ�y�ٕr�gT�Ⱦ��a����ݔ���}�_��N���Ķ�Ӌ����@�Εr�g�ȵ�ƽ���ٶȣ��õ��D�ٜy��ֵ���҂�����256���ľ��a����ݔ���}�_�͵�DSP��QEP��Ԫ���^4���l̎����ÿ�D�l��l 024���}�_���O���ɘ����ڞ�25 ms��N�鮔ǰ�ɼ��ľ��a���}�_�����t늙C��ǰ���D�ٞ飺
2��5ָ�U���ɼ�̎���·
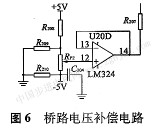
ָ�U��������������ؓ��ݔ����̖�ˣ������\��Ŵ���LM324�����M�Ѓɼ��Ŵ�һ������ؓݔ���M�в�ַŴڶ������Ŵ�Y���ٴηŴ��Ժ�ݔ����DsP��ADģ�K��ģ�Mݔ��ͨ����ͬ�r�����a����������·��ƽ�����a����늉��������OӋ��һ���a���·[4]����D6��ʾ���λ��R���γɵ�늉����^U20D�M���迹׃�Q��ͨ�^R207�ӵ��ڶ���L,M324��ͬ��ݔ��ˣ������a�������ã��a��������-309��309 mV��
2��6�����㷨
PID�ǹ��I�г��õĿ����㷨���OӋ���Σ��������{����ԓ����ϵ�y�У��ٶȣ�λ���{������PI�{������ݔ����̖�鶨�l�{����PwM��̖��������ͨ�^PI�����IJ����{�����M���{��PwM���}�����_��****�Ŀ���Ч���������Ҏ�ɞ飺
ʽ�У�Kp�����ϵ����TI��e�֕r�g������ԓʽ��λ���㷨�����������ֻ�c��ǰ��ƫ�����P�����e�ֲ��քt��ϵ�y�^ȥ����ƫ����۷e��ϵ�y�M��PI�㷨���\����һ������ѭ�h���^�̣�ͨ�^DsP�Ķ��r��Timer3�O��һ���̶����Д����ڣ���ÿ�������Д��Ы@��늙C���D�٣�ÿһ��PI�\�㶼���î�ǰ���µĔ�����PI�\��ĽY���͵�Timerl��TlcMPR��ھ����r�ظ���PwM��ռ�ձȡ�
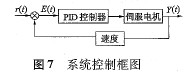
�������о���ϵ�y�ǻ����ٶȷ����Ŀ���ϵ�y���Y����D��D7��ʾ��
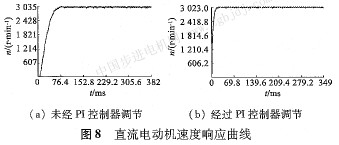
ͨ�^�xȡ��MPI�������O�����M��ԇ��K�xȡ��һ�M���m��PI���ƅ���Kp=O.5��KI=0��4������PI������ǰ��늙C���ٶ�푑�������D8��ʾ���@���ٶ�ȡ3 000 r��min�����^PI�������{���Ժ�푑��r�g�s���ˣ����B�`���ڰٷ�֮O��8���ң�Ч�����^���롣
3����ϵ�yܛ���OӋ
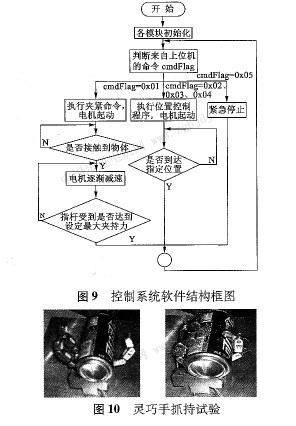
����ܛ���ĺ����Ǹ�ģ�K�ij�ʼ�����Д���ճ���ģ�K�ij�ʼ������PWM�}�_�·���������a�·(QEP)��ADģ�K�����r���Լ�scIģ�K�ij�ʼ�����Д���ճ������AD�D�Q�|�l�Дࡢ���r���Д�(����PID�{�١�늙C�ٶȣ�λ��Ӌ���)��scI�����Дࡣ��ϵ�yܛ���Y����D9��ʾ������λ�C���յ�������λ�C������Ϳ��ƅ����r���M��scI�����Д���ճ����������������Լ��Į�ǰ�Ŀ��ƅ����������a�}�_�ɘ����ڵ��_�r������Ӌ��늙C��ǰ�D�ٲ����D���M��PID�{���Խӽ��O���D�١�BHG-1���`����ץ�ֈA�������w�Č��؈D��D10��ʾ��
4�Y�Z
�����������������Ľ�����BHG-l��ȫ�ӆ����ɶ������`���ֵĿ���ϵ�y��ͨ�^�`���֊A��ԇ���{ԇ�\�У����p�d�ĕr����Ԍ��F�����\�Ӻ�λ�ÿ��ƣ�ͨ�^PID�{�������ƣ���ϵ�y���������D�ٳ��{��С���ߟo���{�������ٕr�g�̡�
����ԓϵ�y�Dz���TM320LF2407A����ĵĔ��ֿ���ϵ�y������Ӳ���·���OӋ�����ҿɿ���ͬ�r����DsP�ď����\��̎������ʹ�Ï��s�㷨���Ԍ��F�������ĸ������ܞ錍�F���s�Ŀ���Ҏ���ṩ�˻��A�������w�eС���ԃr�ȸߵă��c�����\�ӿ��Ʊ��^������x��
|