���\�C������ϵ�y���OӋ�c���F
���S܊��ꐂ���������
(�����I���g�WԺ���V�|����518055)
ժҪ���U����Robocon��ِģ�K���\�C������ϵ�y���OӋ��ԓ�OӋ������ϵ�y�Cе���ֵ�܇�d�C�������ߙC�����OӋ���Լ�늿�ϵ�y���OӋ��늿�ϵ�y���OӋ�����������������OӋ������݆��늙C�Ӻ�܇�d�C��늙C�����OӋ�����`�������C�����OӋ�������Σ����ÿɿ����_�����A|ʮ��Ч����
�P�I�~���C���ˣ���ϵ�y��늿�ϵ�y
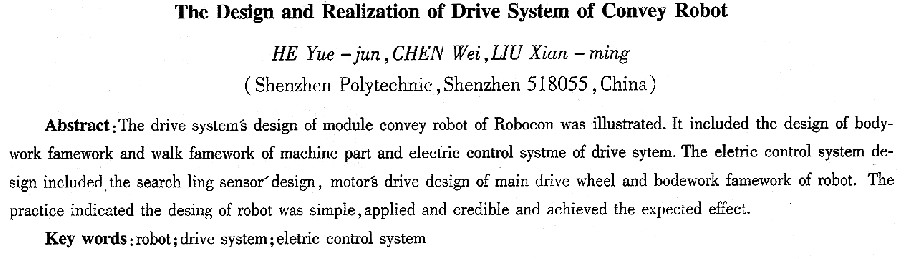
�ЈD���̖��TM33��TM383��4 �īI���R�a��A ���¾�̖��1004-7018(2008)04��0032��03
O����
Robocort�遆�ޏV���ҕ�ϕ�(ABU)�e�k�ā�����ȴ�W���C���˴�ِ�����}�Ǹ����S����ָ��܇�Ĺ����ƶ��ġ��A��֮�⡱����ِҎ�t��Ҫ�������£��t;G꠷քe�����քәC����(�����S��)���ԄәC����(��������)��ľ�K(�tꠞ�tɫģ�K���Gꠞ�Gɫģ�K)�ŵ�����܇��(���ϵĶ���)�ϡ���ľ�K�ŵ�����܇��픲����ռ�����@�v����܇�������÷֣���Ȧ����Ȧ����Ȧ��܇�ķ�ֵ�քe��3�֡�2�ֺ�1�֡�****ռ�б�ِ���������3�v����܇��������V���Ρ�ָ��܇������ǫ@��ꠡ��ڃ��δ���ɡ�ָ��܇������r�£��÷ֶ��꠫@�١�������ِ����3��犡�������Ҫ�U����У�����ęCе�ֵ�������ģ�K���\�C����(���ҷ���ِ�е��ԄәC����)��ϵ�y���OӋ��
1��ϵ�y�Y���OӋ
�����\�C������ϵ�y�Cе�Y����Ҫ�������ߙC����܇�d�C���ɲ��֡�
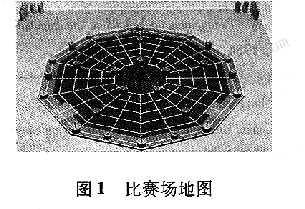
1��1���ߙC���ĽY���OӋ
���ߙC������݆ʽ�ӷ�ʽ����Y������ʾ��D��D2��ʾ������Ҫ������ʹ�C���˰����O�������_�A�ȵ�λ�á����Ƀɂ�24 V�ŷ�ֱ��늄әC�̓ɂ��f��݆�M�ɡ��ɂ�ֱ��늄әC���b�ڙC���˵ĺ��քe�Ӄɂ���݆����C�����Є��ṩ������܇݆���ܛ�����z���ϣ�������܇݆Ħ��ϵ�����ɂ��f��݆���b�ڙC���˵�ǰ������C���˱��w�ṩ������֧�Σ������S��݆���\�ӷ����\�ӡ��ڿ����ϣ��҂�ͨ�^���b��܇ǰ�ļt�ⷴ��ʽ��������У��z�y�����ϵİ�ɫ���������Էքe���ƃɂ���܇늙C���D�ٲ�Ķ����ƙC���˰�����Ҏ����·�����M��
1��2܇�d�C����ϵ�y�ęC���OӋ
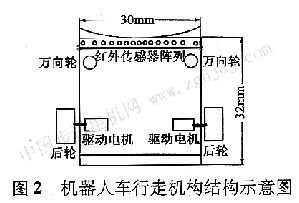
܇�d�C���Y���D��D3��ʾ�������������ڣ����C���˵��_ָ���ĵ��c���ÏęCе�ְγ�������ģ�K(�����ҷ��C���ˎ����ɫ�z���^����������R�e������ģ�K)��Ȼ��ͨ�^�Cе���D�Q�C����ʹ�������еďęCе�ֺ����Cе��ͬ�r��r��D��90�����C����ǰ��ďęCе���D���C������߅�����Cе���D���C������ǰ�����C���˲������Cе�ְ��ż��������úõ�ģ�K��
���ڱ�ِ���C���˵Ŀ�������Ҫ��,����҂����OӋ��,�ęCе�������^�p,�����σH���ڰ�ȡ�́G��������ģ�K�������Cе�քt������Ҫ�΄գ����ڰ��\�Ͱ����Լ���ģ�K�����ęCе���D�Q�C�������F���X݆���ӣ����F���X݆���D�Q��늄әC��D4��ʾ��
�����ęCе�ֵIJ��ã�������ҷ��C���˵�Ч������ʹ���������҂����_��܇�����ź�ģ�K���ҷ�Ҳ��ͨ�^���ߌ�����ģ�K���Ķ��÷֡�
�Cе�ֵ��������ֲ��Ì�ͬ�������ӣ�����߷����ԡ��Cе�ֵ��_צ������צ�ϼ��b�����z�ͺ��ޣ�����߸��������Cе�ֵ�������늙C���Cе�ֵ��_צ��늙C�������ęCе�ֵ��D�Q�C���е�늙C�������Î����i����24 Vֱ���p��늄әC�����ڳ�����ơ�
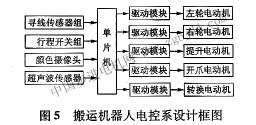
2��ϵ�y늿��OӋ
2��1Ӳ��ϵ�y�OӋ
�C����늿�ϵ�y��ԭ����D��D5��ʾ��������ِҪ�����ЙC���˿����������^50kg������Դ����24 V��늳ء�����҂�����1��5 AH���U����늳�������Դ���U����늳��c���^�����������������ã�ȱ�c���w�e�������^�أ����]���҂��OӋ�ęC�������������^�p(�C�������ɲ��ִ����X�Ͻ�Y������܇�����H���10��2 kg)���m��������늳ص�����߀��ʹ܇�ױP���Ľ��ͣ����әC�������ߵķ����ԣ�����҂������˴���͵�늳ء�
늿�ϵ�y�Ŀ��ƺ��ģ��҂����õ�������Par��allax��˾��BS40�͆�Ƭ�C��ԓ��Ƭ�C��40���_������PBASIC�Z�Ծ��̣�ԓ�Z���cBASIC�����������̷��㡢���x�Ժá�����ԓоƬ߀���г����Ԅ����d���ܡ���ֱ�ӌ�Pc�C�Ͼ��Ƶij���ֱ�����d����Ƭ�C�Ԏ��Ĵ惦���У��o��ʹ�÷���������������{ԇ��
2��1��1�����������M
�C���˵Č����������M�Ĺ��������c���x���Ƿ�ǡ�����[�ŵ�λ���Ƿ����_��ֱ���Pϵ���C���˵����_���M��һ����f����������������Խ�࣬�t�C���ˌ���Խ�������mƫ����Խ��������Ƭ�C�z�y����������B�ĕr�g���ھ�Խ�L���`���Խ��͡��C�Ͽ��]�������أ��҂�����15������������������ԭ�t�ǣ����g������֮�g���x�g϶�^�ܣ����ڙC�����߷�������Խ���⣬���������g϶Խ�裬�������mƫ������
�C���˵Č����^�̱�횝M�����µĻ����l����
(1)ϵ�y�������oՓ܇�w�Į�ǰλ����Σ�ֻҪ�������ڰ��Ϸ���܇�w�����ľ����܉��Ք����c���غϣ����ܳ��F�lɢ(�_����)������ʎ(܇�w�ڰ��������ؔ[��)����r��
(2)ϵ�y�Ŀ����Ժá����܉�����Ք������ڱ�ِ�^���и����D���c֮�g�����M���x�̣ܶ�����܇�w����ڶ̾��x��څ������ͬ�r܇�w���{���^���в�����̫��ij��{���������ܵ��ڔ_(��Ҫ�ǵ��治��ƽ������ĸɔ_)�rƫ�x����
(3)���M�ٶȿ졣�����^��������݆��ƽ���ٶȿ�������r���ٶ�ʼ�K�����D(�����F���D��r)��
���C���\�У��mƫ���ܵĺÉģ�ȡ�Q�ڃ��c��һ�nj������ķֱ��ʣ����Ǽmƫ���ą�����
�C���˰���ۙ�Ļ���ԭ�������xȡ��������������������̖���Д��C����ǰ��������ƫ�x���ij̶ȣ������mƫ���ó�����݆���ٶ�������ʹ����݆�ڼmƫ�r�D�ٱƽ�һ�������������ʹ�ÙC�����܉����ƽ�������������M�����^����Ŀ����������Ǹ����˵Ľ��õ���܇�w�����^��������݆���ٶȿ���������������ٶȿ����������Ǹ��������@���lԭ�t���Y���˵Ľ��õ��ġ������҂�ʹ�õİ��z�y���z�y�c�Ĕ������ޣ���ˌ��H�ϙz�y����λ�̷������H�����xɢ�ģ���������r��ֻ������1��2���z�y�cλ�ڰ��Ϸ�����˿��Ը���ƫ�x܇�w����****��һ���z�y�c���ȵ�Ҏ�t���҂����õ�15���z�y�c�M�о��a��
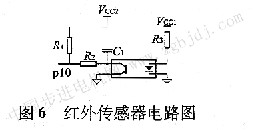
�����������ж�N��Ϳ��x�����ڹ��������ܹ�Ӱ��^���w�������ɫ�������ɱ������^�ߣ�ʹ�Ï��s����˱�ϵ�y����Parallax��˾��QTI�t��ʽ�������������ԭ��D��D6��ʾ���{����׃���R���Ĵ�С�������{�������������������`���ȣ��ԅ^�ֈ����Ծ��͈����{ɫ���r��
2��1��2�����y��
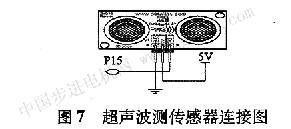
�C���������M�в���parallax ping������������̽�yǰ�����ϵK���ϣ��Լ��y���C�����c���϶��ӵľ��x�����ڙC������Ҫ���_λ�Õr�p�١������y���B�ӈD��D7��ʾ���乤��ԭ��飺���ȏ�
��һ����ָ��ĽY�����£�
[���c��̖]ָ�����[����]��܇��(CR) ���У�ָ�������Ӣ����ĸ�M�ɣ����x��ą���
�鰢�������֣�ָ�������ɻ�܇��(CR��ASCII�a��ʮ�M�ƴ��a��13)�Y�������磬V1000��ʾ늙C��1 000 r��min�ٶ������\�У�Vһ1000��ʾ늙C��1 000 r��min�ٶȷ����\�У�VO��ʾ늙C�Ƅӡ�
���a������Ĭ�J��512���ֱ��ʡ�
��Ƭ�Cݔ�����пھ�ͬ�r�c�ɂ��������B�����ɾW�j�\��ģʽ�����_����ͨ�^MOTION MAN��AGE 3ܛ���քe�O�Þ鹝�cl���c2���ھW�jģʽ�£���Ƭ�C�������l����r���Ȏ��Ϲ��c��̖������һ�����քe���ƃ��_�������Ķ������˿��ơ�
�ھW�jģʽ�£������Ƭ�C�������l��ASCII�aָ���]��Ŀ���������c��̖���tָ���Ƭ�CP15�l���|�l��̖��Ȼ��ͨ�^���ճ���������̖���õ����ߕr�g��ֵ�����Գ����ٶȣ��ٳ���2�����ɵõ����y���x��
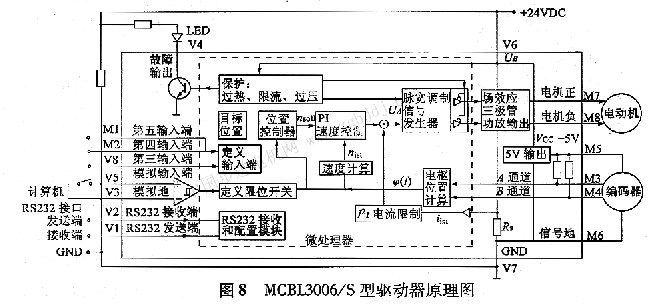
2��1��3������݆늄әC����
���C���˃���݆��늄әC�քe���õ�MAx0Nֱ��늄әC�����ʞ�70 w������������ʿFAuLHABER���a��MCBL3006��s����������Ȳ�ԭ��D��D8��ʾ��ԓ�������ڸ���DsP�_�l��������늙C���ٶȿ��ƺ�λ�ÿ��ơ����ٿ�ͬ�����O�ߣ���Ť�ز��ӵͣ�PI�������ܴ_��늙C���H�ٶ�ֵ�c�A��ֵ�߶�һ�¡�늙C�{��һ������ķNģʽ��1)ģ��̖�{���ٶȣ�2)PWM��ʽ��3)���Mģʽ��4)ָ��ģʽ����ͨ�^��Ƭ�C���п�ݔ������ASCII�a��ʽ��ָ��a���o�������ڣ��Կ���늙C���\�С����IJ��õľ����@�N��ʽ����ԓģʽ�£�늙C�ٶ���232���ڽo����Ŀ��ֵ���_���������W�j�������������ա���������λ�C�͆�Ƭ�Cͨ�Ņf�h�飺�����ʾ���9 600����λ����λ��һλֹͣλ���o��żУ�λ���ڿ���ܛ���У�������������B���Q��늙C��݆�\���ٶȲ�������£�
CASE 000001 100000000
SER0UT 0��16624��[��DEC 1����V-1000����cR]
SEROuT 0��16624��[��DEC 2����V1200����cR]
�����У�V-1000��ʾ늙C��r��D�ӵ��ٶȞ�l 000 r��min����V1200�t��ʾ늙C형rᘵ��D���ٶȞ�1 200 r��min��
2��1��4܇�d�p��늄әC����
��ϵ�y܇�d�p��늄әC��Ҫ���Ă���һ�����������Cе�֣����_늄әC�քe���ڃɂ��Cе�ֵ��_צ�c�Pצ����һ�_늄әC�t�������ęCе�ֵ��D�Q�����_ֱ���p��늄әC������ͬһ�N���·�ӡ����r���҂��Lԇ�˃ɷN�ӷ�ʽ���F�ڿ��Y���£�
(1)����LMDl8200�ӣ�LMDl8200���錣��С��늄әC��оƬ��ʹ�÷��㡢�ɿ�������������_3 A����܇�d�C��늄әC���o���}����Ŀǰ�����Ј���ԓоƬ�����������˾��ð�aƷ���|�����ɿ��������l����Ƭ�ӬF������҂��ڌ��H�����У��]�в����@�N��ʽ��
(2)����L298�ӣ�L298��ģ�KҲ����LMDl8200���c�������pH���늉���������ʼ����·�������Á��Ӄ��_ֱ��늄әC���M늄әC�ȸ���ؓ�d������ÿһ·ݔ�����������ṩ���B�m����H��2 A�����]��늙C�����r�����ܰl���Ķ��D�͟���оƬ�F��(����C�����ڰΌ���ģ�K�r������סģ�K���Ա��oģ�K�����γ�����r)������ڌ��Hϵ�y�OӋ�r���҂���ÿ��1298оƬ�ă�·ݔ����ݔ�����õ��B�m4 A�����ݔ�����Ķ�������������������Ϳɿ��ԡ������·���B�ӈD��D9��ʾ���D10--
3�Y�Z
���Ľ�B��ģ�K���\�C������ᘌ���ِ���c�OӋ�ġ��书���^��(���H�ܰ��\����ģ�K��߀��ͬ�r�γ������ѷ��úõ�ģ�K)��܇�w�OӋ����Y�����Σ������^�p����늿�ϵ�y�OӋ�����������Ժã��ڌ����У����F�������_�����A�ڵ�Ŀ�ġ�
|