���Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆ϵ�y(t��ng)����
���w�i�����F�ܣ����F��
(�����I���I(y��)��W(xu��)�������������I150001)
ժҪ���w݆����һ�N���͵������惦(ch��)��ʽ�������S��W(xu��)늳����](m��i)�еă�(y��u)��(sh��)�����ܵ�Խ��(l��i)Խ����P(gu��n)ע�������������惦(ch��)���ˑB(t��i)���Ƶ��w݆ϵ�y(t��ng)������Ч�ʸߣ����ܴ����L(zh��ng)�ȃ�(y��u)�c(di��n)����(du��)�Ն�(w��n)�w�������ܵ���ߌ�����Ҫ���á���B�ˮ�(d��ng)ǰ��(gu��)��(n��i)�⌦(du��)�ڼ��Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆ϵ�y(t��ng)���о��ɹ�������(du��)�乤��ԭ�����P(gu��n)�I���g(sh��)�M(j��n)���˷�����
�P(gu��n)�I�~���w݆���ˑB(t��i)���ƣ������惦(ch��)�����g�w����
�ЈD���̖(h��o)��TM341 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004-7018(2008)01��0053��05
0�� ��
�������w���������ܣ�ʹ���w�e��С���ɱ����͡��������L(zh��ng)���Ǹ���(gu��)�����ˆT����̽���ķ����y(t��ng)���l(w��i)�ǵ��w�������û��W(xu��)늳�(l��i)��(ch��)����ܣ�����k늳غ�懚�늳أ������W(xu��)늳ش���侶�㣬������̡����ܵ͡�Ч�ʲ��ߡ��ܭh(hu��n)���ض�Ӱ푴�ȣ��ѽ�(j��ng)�u�u���ܝM����һ�����g�w������Ҫ��
�S���w݆���g(sh��)���M(j��n)����ʹ���w݆�����w�����������惦(ch��)�ֶΣ���(l��i)ȡ���F(xi��n)�еĻ��W(xu��)늳أ��ѽ�(j��ng)�ɞ�l(f��)չڅ��(sh��)���w݆�������惦(ch��)�ڸ������D(zhu��n)��݆���У���һ�N���͵ęC(j��)е��(ch��)�ܷ�ʽ�����������惦(ch��)�������D(zhu��n)���ٶȼ��D(zhu��n)��(d��ng)�T����Ӱ푡��w݆늳غ͂��y(t��ng)���W(xu��)늳���ȣ�������(y��u)�c(di��n)��
(1)����(�惦(ch��)�������|(zh��)��)���ǻ��W(xu��)늳ص�5��lO����
(2)�����L(zh��ng)��������10�����ϣ��Ҳ��ܳ��늴Δ�(sh��)��Ӱ푡�
(3)Ч�ʸ��ߣ����_(d��)�ٷ�֮85���ٷ�֮95�������W(xu��)늳�ֻ�аٷ�֮70���ҡ�
(4)�߳�����ȣ��Ҿ��й��ʄ���������
(5)���늠�B(t��i)���לy(c��)����
���y(t��ng)���w�����ˑB(t��i)�������õĽDŽ�(d��ng)��ͨ���ǿ�
�����������ݺͷ������w݆�b�Ì�(sh��)�F(xi��n)�ġ���s�p�w�e������������һ�N�µ��w݆��(y��ng)�÷����������Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆ϵ�y(t��ng)���������o(j��)70����״α�������@�N�w݆����������(ch��)��Ԫ�������o�w������ؓ(f��)�d������ܣ��������ˑB(t��i)���ƣ������w�������w���ˑB(t��i)����ͬ�r(sh��)��(sh��)�F(xi��n)�ɷN���ܣ����Ԝp�p�w�������w�e���|(zh��)�����ɱ���߀�����L(zh��ng)��������Ч�ʵă�(y��u)�c(di��n)���ԏ��@��(g��)�������ԁ�(l��i)��һֱ�ܵ��P(gu��n)ע�����P(gu��n)���о��ڲ����չ�_�����룺���挢��B���Ƀ�(ch��)�ܺ��ˑB(t��i)����ϵ�y(t��ng)�Ěvʷ��****�о��ɹ���
1��(gu��)��(n��i)��l(f��)չ�śr
��(ch��)���w݆��ꑵ��ϵđ�(y��ng)���о��_չ�^�硣Ŀǰ��ijЩ�����I(l��ng)��(ch��)���w݆�ѽ�(j��ng)����һ��Ҏ(gu��)ģ���̘I(y��)��(y��ng)�ã��ѽ�(j��ng)�Ї�(gu��)��Ĺ�˾�����ṩ�̘I(y��)���ă�(ch��)���w݆�a(ch��n)Ʒ������ô��nywheel Ene gy Systems��˾������(gu��)��Beacon P0wer��˾=�w݆��(ch��)���ں����w�����ϵđ�(y��ng)��������Roes��1961�������[1]�����īI(xi��n)[1]�У������O(sh��)Ӌ(j��)��һ�N�ڃɂ�(g��)���������D(zhu��n)�ĴőҸ��w݆�Ѓ�(ch��)��������ϵ�y(t��ng)���@��(g��)ϵ�y(t��ng)�������ܶȞ�6l kJ�\(y��n)���ٶ�9 500��19 000 r��min���D(zhu��n)��****���ٶ�306��612 n1��s��
an derson��Keckler��1973����īI(xi��n)[2]���״�����˼��Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆ϵ�y(t��ng)(���º�(ji��n)�QIPAcs)�@��(g��)�������(gu��)���պ�������@��(g��)�r(sh��)���_ʼ�ˌ�(du��)IPAcs���о���
20���o(j��)70���������(gu��)���պ���ֵ������о����Č�(du��)��IPAcs�ĸ����M(j��n)�����о������M(j��n)����һЩ����ԇ�(y��n)����Փ�������@Щԇ�(y��n)������Č�(du��)IPAcs�ĵض�ԇ�(y��n)����������y(c��)ԇ��һ��(g��)������IPAcs��Ԫ���w݆���D(zhu��n)�Ӳ�������죬�w݆��Ԫ�Ŀ������_(d��)��68 kJ��kg���\(y��n)���ٶ���17 500��35000r��min֮�g�����ÝL���S�У��D(zhu��n)��ֱ��45��5 cm���D(zhu��n)��߅��****���ٶ�832 m��s��
20���o(j��)80�������(du��)��IPAcs���о��M(j��n)һ�����롣�����@���g���īI(xi��n)������Փ�ϵķ�����Փ�C�������w݆�Ď��Π�D(zhu��n)�����ò��ϣ��m�÷����ȣ������](m��i)�����P(gu��n)�Č�(sh��)��ԇ�(y��n)��
20���o(j��)90������ڣ����ڴ��S�м��g(sh��)�ߏ�(qi��ng)�ȏ�(f��)�ϲ��ϼ��g(sh��)���M(j��n)�����w݆���g(sh��)�@�����µ��P(gu��n)ע������(gu��)���պ���ֺ�����(gu��)��܊չ�_��������ͬ�_�l(f��)IPAcs���ԝM��һ�µ��L(zh��ng)�h(yu��n)��Ҫ�����c�_�l(f��)��Ҳ����һЩ��W(xu��)��һЩ��˾����ÿ��_˹��W(xu��)��HoneyweII��˾�����ϣ���R����˾��[3]��
���^(gu��)ȥ��ʮ���������(gu��)���պ�����ٵĸ����о����ĵ��dȤ��Ҫ�����w݆��(ch��)���ϣ���β����ˑB(t��i)���Ƶ��о����������о����c(di��n)�nj���(l��i)�ڇ�(gu��)�H���gվ(Iss)����E݆늳�ȡ��懚䡢��k늳ء�����Ӌ(j��)�����ڵ͵���܉���ϵ������ȼ�(j��)��1 080��2 520kJ֮�g�������w�����ϑ�(y��ng)���w݆��Ȼ����u��С��360 kJ��С���w�����ϑ�(y��ng)�ã����(y��ng)�ÔU(ku��)չ������̽�y(c��)܇��һЩ�����(xi��ng)Ŀ�ϡ�
��2004��9��2�գ��ɸ����w݆�_�l(f��)С�M�O(sh��)Ӌ(j��)������w݆G2���ɹ�����41 000 r��min���D(zhu��n)�����\(y��n)�С�����G2�w݆��Ŀ��(bi��o)�nj�(sh��)�F(xi��n)һ��(g��)�ͳɱ���1ë݆ϵ�y(t��ng)ģ�K�����M(j��n)���w݆�������ļ��ɺ�Փ�C��G2�w݆�_(d��)���~���ٶȵĕr(sh��)�g��ȏ�ǰ���w݆���죬����G2���\(y��n)�Гp�ĺ͏�ǰ��Ƚ����˰ٷ�֮30���D(zhu��n)�Ӝض���9��(g��)С�r(sh��)�Ĝy(c��)ԇ�r(sh��)�g��ֻ������10�档������
�����ĵ��о������Ƅ�(d��ng)���w݆���g(sh��)�İl(f��)չ���������D(zhu��n)�ӏ�(f��)�ϲ��ϼ��g(sh��)����������ϵ�y(t��ng)�ȣ��������w݆���g(sh��)�����ˮ�(d��ng)�������****ˮƽ��
����(gu��)���պ���ֵ��w݆�y(c��)ԇƽ�_(t��i)��Ҫ���Á�(l��i)�(y��n)�C���S���ˑB(t��i)���ƺ������惦(ch��)ϵ�y(t��ng)���������Á�(l��i)�y(c��)ԇ��(gu��)�H���gվ���w݆��(ch��)��ϵ�y(t��ng)��ԭ�͡����Sԇ�(y��n)��Ӳ���Y(ji��)��(g��u)�����ɂ�(g��)���D(zhu��n)�Sƽ�е��w݆ģ�K��
����(gu��)��܊��(sh��)�(y��n)��(AFRL)���о����ڡ�FAcETs(Flywheel Attitude C0ntml Energy Trailsmlsslon an dsmage)Ӌ(j��)������һ���֡��@��(g��)Ӌ(j��)��Ŀǰȡ�õ�****�ɹ��ǽ����˵�һһ��(g��)�����ɶȿ��g�w�������w݆��(ch��)�ܺ��ˑB(t��i)����ԇ�(y��n)ƽ�_(t��i)AsTREx��AsTRExƽ�_(t��i)���ôőҸ��S�У������ṩ�w�����ˑB(t��i)���Ɯy(c��)ԇ�õ������ɶȡ��@��(g��)ƽ�_(t��i)���Ԍ�(du��)ͬ�r(sh��)�l(f��)�����w݆��(ch��)�ܺ��ˑB(t��i)���������M(j��n)�Мy(c��)ԇ��Ҳ�����о����w݆���@�ɷN���܌�(du��)ϵ�y(t��ng)����(l��i)�Ĕ_��(d��ng)��
H0nevwell��˾ᘌ�(du��)AsTREx�y(c��)ԇƽ�_(t��i)���M(j��n)�����w݆��Ԫ���о����졣�����������Ƹ���Ʒ�|(zh��)���w݆���Ծ߂������������
���ϣ���R����˾�����о�����ӆ�˺ϼs��ؓ(f��)؟(z��)�O(sh��)Ӌ(j��)����͜y(c��)ԇһ�N���͵�IPAcs�әC(j��)���Q��c0MET(coordinated M0mentum an d Fne Trartsfel)�w݆ϵ�y(t��ng)��һ��(g��)���͵�IPAcsϵ�y(t��ng)���Բ��Î��f(w��n)��(ji��)���w݆���߲���һ��(du��)�S�̶����������D(zhu��n)���w݆���ڲ���һ��(du��)���������D(zhu��n)�w݆����r�£�������Ҫ3��(g��)�̶��S���6��(g��)�w݆����ȡ�������ˑB(t��i)������������COMET�w݆ϵ�y(t��ng)ֻ����4��(g��)�̶��S���w݆�������Խ������η��á��@��(g��)�(xi��ng)Ŀ��Ŀ��(bi��o)��Փ�CcOMET�w݆ϵ�y(t��ng)���Ʉ�(d��ng)���������惦(ch��)�Ŀ����ԣ�
���īI(xi��n)[4]�У��¿��_˹��W(xu��)���о��ˆT������һ�N���øߜس���(d��o)�őҸ��S�е�С���l(w��i)�����C(j��)�ϵ�y(t��ng)(MEMIS)�õă�(ch��)�ܣ��ˑB(t��i)�����w݆ϵ�y(t��ng)���w݆�|(zh��)��1��1 kg��ֱ��12.7 cm����5 cm��늄�(d��ng)�C(j��)���l(f��)늙C(j��)���ßo(w��)ˢֱ��늄�(d��ng)�C(j��)���@�N�w݆�ĽDŽ�(d��ng)����0.083 kg-m2��s����530 kr��min�ĕr(sh��)����Դ惦(ch��)��(d��ng)��2��32 kJ�����ı��ܴ�s��162 kw���w�����ܶȴ�s��370 kJ��L���@�ӵ�ϵ�y(t��ng)�m�ϵ͵���܉���ϵ�С�l(w��i)�ǵ���������(y��ng)�Լ��ˑB(t��i)���ơ�
������һЩIPAcs�о��ɹ��У��īI(xi��n)[5]�����һ�N�m����С���l(w��i)�ǵ����w݆�O(sh��)�룬�@�N�w݆�����ù辧Ԫ�Ƴɣ����Ѓ�(ch��)�ܺ��ˑB(t��i)���Ƶ������������A(y��)Ӌ(j��)��һ��(g��)10cmֱ�����w݆�DŽ�(d��ng)���ܶȿ����_(d��)��9kg��m2��s�������ܶȿ����_(d��)��50 kJ��
�҇�(gu��)��863�(xi��ng)ĿҲ��(du��)���Ƀ�(ch��)�ܺ��ˑB(t��i)����ϵ�y(t��ng)�M(j��n)�����о������c�Ć�λ��502�����L(zh��ng)����C(j��)���ȡ���������̼�w�S���h(hu��n)����֬��h(hu��n)��⁺Ͻ�݆ݞ?z��i)z�ӵķ�ʽ�O(sh��)Ӌ(j��)���������E݆�D(zhu��n)�ӣ���O���D(zhu��n)�ٞ�30 000 r��min���w݆�DŽ�(d��ng)��19 kg��m2��s��ݔ������0��13 N��m���������˻��ڸ߾��Ț⸡�D(zhu��n)�_(t��i)�Ć��S��(ch��)���c�ˑB(t��i)���ƌ�(sh��)�(y��n)ϵ�y(t��ng)��(l��i)ģ�M�w݆�M��(ch��)�ܡ�����
�Լ��M(j��n)���ˑB(t��i)�{(di��o)�����^(gu��)�̡���(gu��)��(n��i)�����S���о��C(j��)��(g��u)Ҳ��(du��)�����w݆���P(gu��n)�I���g(sh��)չ�_���о��������A��W(xu��)���Ƶă�(ch��)���w݆�b���_(d��)����42 000 r��m�͵��O(sh��)Ӌ(j��)�D(zhu��n)�٣�����(ch��)���_(d��)��l 789 kJ[6]��
ֵ��һ����ǣ�Ŀǰ��IPAcs���о�߀��������Փ�����������(y��n)�C�Լ�����ԇ�(y��n)�ϣ����xIPAcs�ڿ��g��ԇ�(y��n)�͑�(y��ng)��߀�д��r(sh��)�ա�
2�w݆�Y(ji��)��(g��u)���P(gu��n)�I���g(sh��)
���Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆ϵ�y(t��ng)��һ�N�߶ȼ��ɵď�(f��)�s�w݆ϵ�y(t��ng)���漰�����W(xu��)��늴ŌW(xu��)�����όW(xu��)�����ƌW(xu��)�ȶ���(g��)�I(l��ng)��һ��(g��)���͵��w݆�Y(ji��)��(g��u)����늄�(d��ng)�C(j��)���l(f��)늙C(j��)����(ch��)���D(zhu��n)�ӡ����S�С���ȫ�����ȡ�����(l��i)����B�����w݆ϵ�y(t��ng)�Ďׂ�(g��)�P(gu��n)�I���g(sh��)��
(1)��(ch��)���D(zhu��n)��
�w݆�D(zhu��n)�ӵă�(ch��)����E��������ʽ��ʾ��
ʽ�У�E��ʾ�D(zhu��n)�Ӵ惦(ch��)�Ą�(d��ng)�ܣ�J��ʾ�D(zhu��n)�ӵ��D(zhu��n)��(d��ng)�T�����ر�ʾ�D(zhu��n)�ӽ��ٶȣ�m��ʾ�D(zhu��n)���|(zh��)����Ks��ʾ�D(zhu��n)���Π�ϵ��(sh��)���ұ�ʾ�����S�Ñ�(y��ng)����p��ʾ�D(zhu��n)���ܶȡ�
�Π�ϵ��(sh��)ȡ�Q���݆�D(zhu��n)�ӵĽY(ji��)��(g��u)�Π�w݆���ϵ����������Լ��w݆��(n��i)���đ�(y��ng)���ֲ������͵ď�(f��)�ϲ����w݆�D(zhu��n)�ӵ��O(sh��)Ӌ(j��)ģ�Ͱ�����ƽ�D(zhu��n)�ӡ��F�ν����D(zhu��n)�Ӽ������Π���D(zhu��n)�ӡ�������r�µ��Π�ϵ��(sh��)****ֵ��l������(sh��)�H�н��ٲ����Π�ϵ��(sh��)****ֵ��O��8���ҡ�
��ʽ(1)���Կ���������w݆�D(zhu��n)�Ӄ�(ch��)����������ˣ����D(zhu��n)��(d��ng)�T�������D(zhu��n)�ٶȡ�ͬ�r(sh��)��(du��)�ں��쑪(y��ng)�ã�Ҫ�������w�e�M����С����(du��)����W/m����ܸߵ�Ҫ����߱��ܣ����˃�(y��u)���D(zhu��n)�����Σ�����Π�ϵ��(sh��)�⣬߀Ҫ�M�����øߏ�(qi��ng)�ȡ����ܶȵIJ��ϡ��ˑB(t��i)����Ҫ��DŽ�(d��ng)��(H=J��)�惦(ch��)�������D(zhu��n)��****�O(sh��)Ӌ(j��)�DZ���݆������w��Ƭ���D(zhu��n)�ӣ���D1��ʾ��
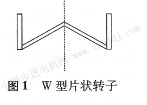 �^(gu��)ȥ�w݆�D(zhu��n)�Ӷ���øߏ�(qi��ng)�Ƚ��ٻ�Ͻ𡣽��ٲ����ܶ��^���ܲ����Ȼ��W(xu��)늳ظߣ����Ұ�ȫ���^��F(xi��n)���w݆�D(zhu��n)��һ�㶼���Ï�(f��)�ϲ����Ƴɣ���̼�w�S�Ͳ����w�S�ȡ���(f��)�ϲ����D(zhu��n)�ӵ��Π�ϵ��(sh��)Ҫ�Ƚ����D(zhu��n)��Сһ������(���īI(xi��n)�f(shu��)��(du��)�����D(zhu��n)�ӣ�Ks=0��45���nj�(sh��)�H�O(sh��)Ӌ(j��)������)�����Ǐ�(f��)�ϲ��ϵ��S�Ñ�(y��ng)�����ܶ�С����������B(t��i)�µď�(f��)�ϲ����D(zhu��n)�ӱ���Ҫ�������B(t��i)�µĽ����D(zhu��n)�Ӵ�5������(f��)�ϲ��ϵ���һ��(g��)��(y��u)��(sh��)�ǣ�һ���w�S�����ڸ������D(zhu��n)���Ɖģ��������o(h��)�⚤���(hu��)׃�ɷ�ĩ�������ˌ�(du��)������(g��)ϵ�y(t��ng)���Ɖġ���ˬF(xi��n)���ߏ�(qi��ng)���w�S��(f��)�ϲ����������w݆�D(zhu��n)�ӵ�������ϡ�
�о��l(f��)�F(xi��n)����(du��)�ڸ������D(zhu��n)���D(zhu��n)�ӣ�����(y��ng)��Ҫ���ڏ���(y��ng)��������(f��)�ϲ����Ǹ����Բ��ϣ����w�S�����Ϗ�(qi��ng)�Ⱥܴ�ֱ�w�S����(qi��ng)�Ⱥ�С����****�����ò������ܣ���(f��)�ϲ����D(zhu��n)�Ӷ��O(sh��)Ӌ(j��)�ɈA�h(hu��n)����@�̶���݆ݞ�϶��ɡ��錍(sh��)�F(xi��n)��(y��u)���O(sh��)Ӌ(j��)����h(hu��n)���Բ��ø߳ɱ����ߏ�(qi��ng)�ȵIJ��ϣ���(n��i)�h(hu��n)���Բ��õͳɱ�����(qi��ng)���^���IJ��ϡ�
(2)���S��
Ŀǰ�ˑB(t��i)�����w݆����ÝL��C(j��)е�S�С��C(j��)е�S�е��S�c�S���g���ɱ�����ڽ��|��Ħ���p�Ĵ����^�̡�����Ҫ��(r��n)�����ȡ��C(j��)е�S�Ќ�(du��)���^���ٵķ������w݆��������������п��Խ��ܣ���(du��)�ڸ��ك�(ch��)���w݆�����Ҫ���ø����M(j��n)�Ĵ��S�С�
���S����һ�N���͵��S�У����ôň�(ch��ng)����������(sh��)�F(xi��n)�S�c�S�еķ�(w��n)���Ҹ����c�F(xi��n)�еĝL���S�еȂ��y(t��ng)֧����ʽ��ȣ���(sh��)�F(xi��n)���S�c�S�еğo(w��)���|�������˙C(j��)еĦ�����o(w��)�蝙(r��n)�������ɳ������\(y��n)�D(zhu��n)�����m�ϵ͜ء���(qi��ng)�侀�ȸ��N���ӭh(hu��n)�������ЏV韑�(y��ng)��ǰ������(gu��)��(n��i)�⌦(du��)���w݆�ô��S�е��о����Ў�ʮ��Ěvʷ��
���S�а��Ƿ���Դ�֞�����(d��ng)ʽ�ͱ���(d��ng)ʽ�ɷN��
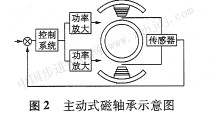
����(d��ng)ʽ���S�и���(j��)�D(zhu��n)��ƫ�����ĵ�λ�ã����Ƅ�(l��)�������ʹ�D(zhu��n)���ܵ�һ��(g��)�؏�(f��)�Ĵ�������֮��������λ�á�����(d��ng)ʽ���S����Ҫ�����������ʷŴ����Լ���(f��)�s�Ŀ���ϵ�y(t��ng)�����Ĺ����^����D2��ʾ������?y��n)��䄂���^���Գ����^����d�ɣ����M(j��n)�댍(sh��)���A�Σ��編��(gu��)��s2M��˾���ṩ��Ʒ��������(d��ng)ʽ���S�Юa(ch��n)Ʒ��
����(d��ng)ʽ���S���ǟo(w��)Դ�ģ��ҟo(w��)��ʩ�ӿ��ƣ����ôň�(ch��ng)�Ĺ�������ʹ�D(zhu��n)�ӷ�(w��n)���Ҹ�������(d��ng)���S�а�������(d��o)���S�С��u��Ч��(y��ng)���S�С������w�S�еȡ��ߜس���(d��o)���S�г��d�����^��(qi��ng)������Ҫ�ض���s�b�ã���(y��ng)�ò��ࣺ�īI(xi��n)[7]��(du��)�u��Ч��(y��ng)���S���M(j��n)�����о����ɹ��ؑҸ���3.2 kg�ص��D(zhu��n)�ӣ����nj�(sh��)�(y��n)�H�ڎ�ʮ��Ɲ�ĵ������M(j��n)�У�������(g��)�b���w�e�^�����ÿ����w�ƳɵĴ��S���ڳ����³��d����С���o(w��)����(sh��)�á�
���]������(d��ng)ʽ�ͱ���(d��ng)ʽ���S�и��Եă�(y��u)ȱ�c(di��n)��Ŀǰ�ă�(ch��)���w݆���S�д���������(d��ng)�S�мӱ���(d��ng)�S�еĻ��ʽ���S�У��@�Ӽ��ܱ��C�^��ij��d���������ܴ�������ġ���������G2�w݆���Dz��û��ʽ���S�С�
(3)��ȫ����
�w݆ϵ�y(t��ng)�İ�ȫ�ԛQ�����w݆���������O(sh��)Ӌ(j��)�����졣��?y��n)��w݆���D(zhu��n)����һ�N�����ڸ��D(zhu��n)���µęC(j��)е�Y(ji��)��(g��u)����Nԭ����ܕ�(hu��)��(d��o)�¹��ϣ������D(zhu��n)�ӏ�(f��)�ϲ������ѣ����ߏ�(f��)�ϲ��Ϻ�݆ݞÓ�x�������S�Гp�ĵȡ�����](m��i)�пɿ��İ�ȫ�������w�����D(zhu��n)�ӌ���(du��)�w������ɇ�(y��n)�ص��Ɖġ�
���g��(y��ng)��Ҫ��M�������������������w�e���İ�ȫ�Կ��]���⚤���ܱ�ʧ�صď�(f��)�ϲ����D(zhu��n)�Ӵ�����Ҫ���]�D(zhu��n)�Ӻ��⚤Ħ��?x��)r˲�g�a(ch��n)���ĸߜء�Ŀǰ�^�õİ�ȫ�����O(sh��)Ӌ(j��)��Փ��������(gu��)�¿��_˹��W(xu��)�_�l(f��)�Ķ��r���O(sh��)Ӌ(j��)��Փ��ԓ��Փ�ĺ����ǣ��w݆����ʹ��ʯī����(qi��ng)�ď�(f��)�ϲ��ψAͲ�r�����ĵ��(l��i)���D(zhu��n)����Ƭ�ď����(d��ng)�ܣ����͂��o�D(zhu��n)��֧����֧��Ӳ��������ؓ(f��)�d��ͬ�r(sh��)���@�N�AͲ�r�������D(zhu��n)��ͨ�^(gu��)Ħ����ɢ����Ƭ�����D(zhu��n)������
(4)���Ƽ��g(sh��)
���Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆ϵ�y(t��ng)���ͬ�r(sh��)��(zh��)���ˑB(t��i)���ƺ��������o�ɷN���ܡ��w݆����׃�D(zhu��n)�ف�(l��i)��(sh��)�F(xi��n)���늣�����׃���DŽ�(d��ng)��ʸ����(l��i)�ṩ�ˑB(t��i)�����D(zhu��n)�ء�����w݆�ڱ��C�ˑB(t��i)���ƾ��ȵ�ǰ����(sh��)�F(xi��n)��(ch��)�ܣ��Ǽ����w݆���Ƽ��g(sh��)Ҫ��Q�����Ć�(w��n)�}��
���Ƚ�B��(ch��)���w݆�Ĺ�����ʽ����(du��)�ڵ͵���܉���ϵ��w����(�����(gu��)�H���gվ)���(y��ng)�ⲻ��һֱ�o̫�(y��ng)��늳���г�늣���(ch��)���w݆�����Nģʽ�������ģʽ����늜p��ģʽ�ͷ��ģʽ���D3����͵IJ��Ã�(ch��)���w݆���w��������ϵ�y(t��ng)�Y(ji��)��(g��u)�D��̫�(y��ng)��늳،������D(zhu��n)�Q����ܣ�һ�����ṩؓ(f��)�d������ܣ�һ����o�w݆ϵ�y(t��ng)��늣��w݆���늿��Թ��oؓ(f��)�d��ܣ�����(j��)ֱ������늉��ıO(ji��n)�y(c��)�Y(ji��)������������һ���Ŀ���Ҏ(gu��)�t�����w݆�ij��늣�ʹ֮�����Nģʽ֮�g�ГQ�����N����ģʽԭ�����¡�
(a)���ģʽ
��(d��ng)̫�(y��ng)ȫ������r(sh��)��̫�(y��ng)��늳��ṩؓ(f��)�d���Iload���w݆�~��������Ige���˕r(sh��)�w݆�����ڳ��ģʽ��ֱ������늉���̫�(y��ng)��늳�����{(di��o)��(ji��)������  (b)��늜p��ģʽ
��(d��ng)̫�(y��ng)��������r(sh��)����̫�(y��ng)��늳����a(ch��n)������������ԝM��ؓ(f��)�dҪ����w݆���~��������Ҫ�˕r(sh��)�w݆�����ڳ�늜p��ģʽ�£�ֱ������늉����w݆ϵ�y(t��ng)�{(di��o)��(ji��)�����У�
(c)���ģʽ
��(d��ng)�(y��ng)����ȫ��Ҋ(ji��n)����r�£��w݆�ṩ���е�ؓ(f��)�d������˕r(sh��)�w݆�����ڷ��ģʽ�£�ֱ������늉����w݆ϵ�y(t��ng)�{(di��o)��(ji��)�����У�  �w݆���ˑB(t��i)���ƹ��ܿ����շ������w݆����׃�ٿ����������݃ɷN��ʽ�\(y��n)�У��������w݆���ù̶��S��ͨ�^(gu��)��׃�w݆���ʁ�(l��i)��׃�DŽ�(d��ng)���������������ݲ����f(w��n)��(ji��)�������\(y��n)�У�ͨ�^(gu��)��׃?n��i)f��(ji��)�S���(l��i)��׃�DŽ�(d��ng)����
������շ������w݆��(l��i)�](m��i)Ӌ(j��)���w݆���ÿ����ЃɷN��ʽ�����÷������D(zhu��n)���w݆��(du��)��������Ҫ3�M�w݆��(du��)���S���ഹֱ����4��(g��)��(d��)���w݆��������4߅�ε�4��(g��)��c(di��n)�ϣ���@��һ�������e(cu��)������߀Ҫ�Ђ����w݆���@��һ��(g��)�����w݆ϵ�y(t��ng)��Ҫ4�M�����w݆��(du��)��5��(g��)��(d��)���w݆���������D(zhu��n)�w݆��(du��)�Y(ji��)��(g��u)�ă�(y��u)�c(di��n)����ÿ��(g��)�S���w݆�ĽDŽ�(d��ng)���Ͷ����㣬�@��ݔ����ܲ��؎���(l��i)�DŽ�(d��ng)����׃���������^���ף�������(d��)���w݆�Y(ji��)��(g��u)�ăɷN��������ϵģ������^��(f��)�s��
��������w݆���Æ��f(w��n)��(ji��)��׃�ٿ����������ݽY(ji��)��(g��u)��(hu��)����(l��i)���y�Ŀ��Ɔ�(w��n)�}���@�N�Y(ji��)��(g��u)�ļ���E݆����׃�D(zhu��n)���S���ṩ�ˑB(t��i)�������õĽDŽ�(d��ng)����ͨ�^(gu��)��׃�D(zhu��n)���D(zhu��n)�ف�(l��i)��(sh��)�F(xi��n)���늡����Ǹ�׃�D(zhu��n)��Ҳ��(hu��)��׃�DŽ�(d��ng)������(du��)���ˑB(t��i)����ϵ�y(t��ng)ģ�ͣ��Ѓɂ�(g��)������(l��i)��Q�@��(g��)��(w��n)�}��һ�nj��S�ֿ���늉�������D(zhu��n)����̖(h��o)ҕ�鸽���D(zhu��n)�أ����nj�֮ҕ��ɔ_��
�īI(xi��n)[8]�Ԅ�(d��ng)�܈A�̈́�(d��ng)��������ʽ�����˼��Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆�Ĺ���ԭ����ָ����ͬ�r(sh��)�M�ユ(ch��)�ܺ��ˑB(t��i)���ƵĻ���Ҫ�����ڷ��ģʽ�������С��(d��ng)��������С��(d��ng)�܈A���С�3���Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆ϵ�y(t��ng)չ�� ���Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆��һ�Nȫ�µĸ���@�Nһ݆���õ�ϵ�y(t��ng)���Դ��E�������w�e���|(zh��)�����M(j��n)������w���������w���ܣ���(y��ng)��ǰ���V韡�
�ˑB(t��i)�����w݆Ŀǰ���г���ļ��g(sh��)�������ں��պ����ϑ�(y��ng)�ã������_(d��)���M���Ч�������֮��(ch��)���w݆��һ�N�^�µļ��g(sh��)��Ŀǰ���g(sh��)߀�������ƣ�߀δ�ڿ��g�ό�(sh��)�H��(y��ng)�á����ǣ���?y��n)��w݆늳ؾ��в�������ă�(y��u)��(sh��)���Ã�(ch��)���w݆ȡ�����W(xu��)늳أ��ѽ�(j��ng)�ɞ麽�켼�g(sh��)����һ��(g��)Ŀ��(bi��o)������֮�⣬�w݆�ڵ��������I(l��ng)����Ҳ��;�V������ֲ�ʽ��Դϵ�y(t��ng)����܇늳�
�Ͳ��g���Դ���Ǒ�(y��ng)��(du��)������Դ���h(hu��n)����(w��n)�}��һ��(g��)�����ֶΡ��ɴ˿�Ҋ(ji��n)���l(f��)չ��(ch��)���w݆Ҳ���ش����x��
�����w݆ϵ�y(t��ng)�漰���S���W(xu��)�ƺ��I(l��ng)����һ��(g��)�dz���(f��)�s��ϵ�y(t��ng)��Ŀǰ�����w݆ϵ�y(t��ng)���y�}߀�кܶ࣬�����S���P(gu��n)�I���g(sh��)�������룬����͓p�ĵ��S�С��ɿ��İ�ȫ������߀�Џ�(f��)�s�Ŀ����㷨�ȡ��Դ��S�Ё�(l��i)�f(shu��)��Ŀǰ�����w݆�ձ��������(d��ng)ʽ�ӱ���(d��ng)ʽ�Ļ�ϴ��S�У��@ֻ��һ�N���з������������롣�����ҵ�һ�N���ȴ����ܺĻ���ܺ��ҷ�(w��n)���ı���(d��ng)
���S�У����O����Ƅ�(d��ng)�w݆���g(sh��)�İl(f��)չ��
�C�^�īI(xi��n)�����Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆ϵ�y(t��ng)Ŀǰ��̎���о��A�Σ�ֻ���ٔ�(sh��)�C(j��)��(g��u)���M(j��n)�����P(gu��n)�о�����Ŀǰ����r��(l��i)�����@�N�����w݆ϵ�y(t��ng)߀�кܶ༼�g(sh��)�y�}Ҫ��Q�����r(sh��)�_(d��)������(sh��)��ˮƽ����ʹ���g(sh��)�_(d��)����������֮ǰ߀Ҫ��(j��ng)�v����ĉ����z�(y��n)���@��ζ���@�(xi��ng)���g(sh��)������δ��(l��i)�ġ��S����(f��)�ϲ��ϼ��g(sh��)�����S���g(sh��)�������Ӽ��g(sh��)�Լ����P(gu��n)���Ʒ����IJ����M(j��n)�����������ż��Ƀ�(ch��)�ܺ��ˑB(t��i)�����w݆ϵ�y(t��ng)����(l��i)�����F(xi��n)��̫���w�����ϡ�
|