�{(di��o)�l�{(di��o)���{(di��o)��ij���늄�(d��ng)�C(j��)�����·
ʷ����
(���ϿƼ���W(xu��)���������471003)
ժҪ��ᘌ�(du��)����늄�(d��ng)�C(j��)���I(y��)��Ҏ(gu��)ģ��(y��ng)�õ����o����һ�N���{(di��o)�l�{(di��o)������ij���늄�(d��ng)�C(j��)�ͳɱ��(q��)��(d��ng)�����·����������Y(ji��)��(g��u)������ԭ�������M(j��n)���ˌ�(sh��)�(y��n)�(y��n)�C��Ч�����á�
�P(gu��n)�I�~������늄�(d��ng)�C(j��)�������·��Lc�C��
�ЈD���̖(h��o)��TM35 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2008)01��0046һ04
O�� ��
����늄�(d��ng)�C(j��)��һ�N���͵��\(y��n)��(d��ng)���ƈ�(zh��)��Ԫ�������в�ͬ�ڂ��y(t��ng)늙C(j��)�Ĺ���ԭ���c�Y(ji��)��(g��u)[1,2]���c���y(t��ng)늙C(j��)��ȣ�����늄�(d��ng)�C(j��)�нY(ji��)��(g��u)��(ji��n)�Σ�����Ҫ��Ȧ�������p���(q��)��(d��ng)�����Π��`��o�����o�ň�(ch��ng)ݗ��ɔ_�������|(zh��)���ȴ�λ��ֱ���(q��)��(d��ng)���T����(y��u)�c(di��n)���@Щ��(y��u)�c(di��n)ʹ�ó���늄�(d��ng)�C(j��)�ں��պ��졢�C(j��)���ˡ����ܼӹ��O(sh��)�䡢�t(y��)���x�������﹤���O(sh��)��ȸ߶��\(y��n)��(d��ng)�����I(l��ng)�����������܇��ӵ���ͨ�\(y��n)��(d��ng)�����I(l��ng)�������V���đ�(y��ng)��ǰ��[3,4]��
Ŀǰ������늄�(d��ng)�C(j��)�(q��)��(d��ng)�����·�Y(ji��)��(g��u)�^���(f��)�s[1-4]��һ���̶����������乤�I(y��)����(y��ng)�á����������һ�Nȫ�����͵ij���늄�(d��ng)�C(j��)�ͳɱ��(q��)��(d��ng)�����·��ԓ�·ݔ���(q��)��(d��ng)��̖(h��o)���l�ʡ���ֵ����λ�����{(di��o)��������һ�Nͨ���(q��)��(d��ng)�·��(y��ng)���ڲ�ͬ�����(ch��ng)�ϡ�
���Ľo�����·�Y(ji��)��(g��u)�������˹���ԭ�������M(j��n)���ˌ�(sh��)�(y��n)�(y��n)�C��Ч�����á�
1�{(di��o)�l�{(di��o)���{(di��o)��ij���늄�(d��ng)�C(j��)�����·
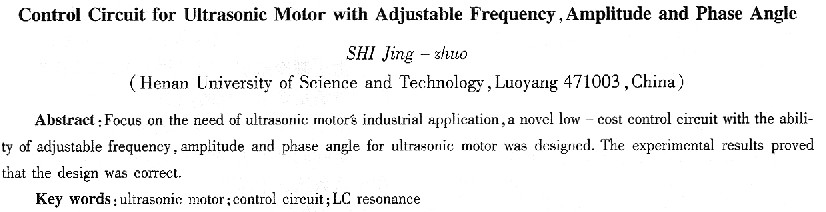
�D1�鱾����������늄�(d��ng)�C(j��)�(q��)��(d��ng)�����·�Ļ����Y(ji��)��(g��u)��D���D���_�P(gu��n)����(MOSEET)�B�Ӟ���Y(ji��)��(g��u)����ֱ��늉��D(zhu��n)�Q����l�����(q��)��(d��ng)늉���ʩ�����ɴ�(li��n)ƥ��늸��c����늄�(d��ng)�C(j��)�е����ԉ���մ�Ƭ��(g��u)�ɵ�Lc�C���·����(li��n)ƥ��늸п�����Ч�؞V�������(q��)��(d��ng)늉��еĸ��l�C���ɷ֣���(sh��)�F(xi��n)���Ƶ����Ҳ��(q��)��(d��ng)��
�@���(li��n)ƥ��늸�ֵ���O(sh��)Ӌ(j��)�����ЃɷN��ͬ�ķ�����һ������߳���늄�(d��ng)�C(j��)��늉���Ŀ�ģ��O(sh��)Ӌ(j��)��(li��n)ƥ��늸�ֵ��ʹ��Lc�·�ڳ���늄�(d��ng)�C(j��)�����l�ʰl(f��)���C��늸�Lȡֵ�飺
ʽ�У�f�鳬��늄�(d��ng)�C(j��)�����l�ʣ�c�鳬��늄�(d��ng)�C(j��)һ��ĵ�Ч��ݡ�ͨ������늄�(d��ng)�C(j��)�����l�ʶ�����һ��(g��)�_����ֵ�������ڿ�������늄�(d��ng)�C(j��)�C(j��)е�����l�ʵ�һ��(g��)С������(n��i)׃���ģ��Á�Ӌ(j��)��늸�ֵ�Ĺ����l�ʔ�(sh��)ֵ����ȡ�鳬��늄�(d��ng)�C(j��)�C(j��)е�����l��ֵ��
����Lc�C���·��֪����(d��ng)Lc�·���������C���l�ʕr(sh��)������늄�(d��ng)�C(j��)(����)��늉�����������_(d��)����****ֵ��ԓ****ֵ���F(xi��n)���Ե����C���l�ʵĹ����c(di��n)�����˳������Lc�C�������������߳���늄�(d��ng)�C(j��)��늉�������ȡ늸О�С��ʽ(1)Ӌ(j��)��ֵ��ijһ��(sh��)ֵ�����w��(sh��)ֵȡ�Q��늙C(j��)��늸Ѕ���(sh��)����ֲ�����(sh��)��
�������������O(sh��)Ӌ(j��)��(li��n)ƥ��늸�ֵ����ʹ��LC�·���������C���B(t��i)����������늄�(d��ng)�C(j��)����ĵ�Ч��ݲ���(hu��)��ȫһ�£�����(li��n)ƥ��늸е��@��Ҳ�����S����������أ�ʹ�Ì�(sh��)�H늸�ֵ�cӋ(j��)��ֵ(����ֵ)�в�e�������^���У�늙C(j��)��Ч��ݺ�ƥ��늸еĴ�СҲ��(hu��)�S�h(hu��n)�����ذl(f��)��׃�����@Щԭ��ʹ�Ã���Lc�·�Ĺ�����B(t��i)��һ�£���(d��o)�³���늄�(d��ng)�C(j��)�����늉���ֵ��һ�¡�ͬ�r(sh��)��Lc�·�����ã�ʹ늙C(j��)��늉�����λ�cʩ����Lc�·�ɶ˵��(q��)��(d��ng)늉���λ��һ�£����������ơ�������Lc�·�Ĺ�����B(t��i)��һ�£��ڌ�(d��o)�³���늄�(d��ng)�C(j��)�����늉���ֵ��һ�µ�ͬ�r(sh��)��Ҳ��(hu��)��(d��o)�������Ʋ�һ�£�ʹ��늙C(j��)�ˌ�(sh��)�H�(q��)��(d��ng)늉�����λ���c����ֵ��ͬ��
��ֵƫ���������λƫ������˳���늄�(d��ng)�C(j��)����ϵ�y(t��ng)ǰ��ͨ���еĿ��ƷǾ��ԣ�ʹ�ÿ����M(j��n)һ����(f��)�s��������Dz����ք�(d��ng)�{(di��o)��(ji��)���@Щ�Ǿ�������Ҳ��(hu��)�����{(di��o)��(ji��)�y�ȡ�
���˱����������}����(li��n)ƥ��늸�ֵ���O(sh��)Ӌ(j��)���Բ�����һ�N����������Lc�C���·�ķ��l�����l���Կ�֪����Lc�·�C���l�ʸ��������ֵ�����Ƶ�׃���ʴ���ƫ�x�C���l���^�h(yu��n)�ą^(q��)�����ֵ�����Ƶ�׃����ҪС�öࡣ����O(sh��)Ӌ(j��)��(li��n)ƥ��늸е�ȡֵ��ʹ��LC�·������ƫ�x���C���B(t��i)�^�h(yu��n)�ą^(q��)����ô����ʹ����Lc�·���C���l�ʲ�ͬ��������B(t��i)��һ�£�����(d��o)�µă����늉���ֵ����λƫ��Ҳ��(hu��)С�öࡣͨ�����@�ӵ�늸�ֵ����ͨ�^��ʽӋ(j��)��õ���
�������������O(sh��)Ӌ(j��)��(li��n)ƥ��늸�ֵ����ʹ��Lc�·������ƫ�x���C���B(t��i)�Ĺ����^(q��)���ɴˎ�����һ��(g��)���}�ǣ�Lc�·���������Ì����@�p����
��Փ���������ɷN�����е���һ�N���O(sh��)Ӌ(j��)��(li��n)ƥ��늸У��������Ա��C����늄�(d��ng)�C(j��)��늉��_(d��)����Ҫ�ķ�ֵ���@һ����������늙C(j��)��늸еķֲ�����(sh��)ʹ��Lc�·��Ʒ�|(zh��)��(sh��)����(hu��)�ܸߣ�Lc�C�������������ޣ���һ���������ڳ���늄�(d��ng)�C(j��)�(q��)��(d��ng)�·ݔ��늉�ͨ����ֱ���͉������籾�������·��ݔ���Դ늉���12 V(Dc)����Ҫ���(q��)��(d��ng)늉����ֵ600 V�ij���늄�(d��ng)�C(j��)��������������Ҫ�_(d��)��50�����������ɷ����ԭ�H��Lc�C���·������ͨ�����ܱ��Cݔ������ֵ���(q��)��(d��ng)늉���
��ˣ������·�O(sh��)Ӌ(j��)�м�����Boost�����·��һ���棬���a(b��)Lc�·�����IJ��㣬���C����늄�(d��ng)�C(j��)�������\(y��n)�С���һ���棬���Ԍ�(sh��)�F(xi��n)��ֵ�{(di��o)��(ji��)���D1���(q��)��(d��ng)�·�а����ɂ�(g��)Boost�����·��Ԫ���քe���oA��B�����(q��)��(d��ng)늉�������߿����`���ԡ�
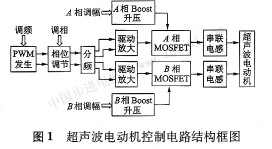
B00st�����·��Ԫ��ԭ��D��D2��ʾ����ͨ��PwM�l(f��)����оƬTL494�o���l�ʹ̶����}�����{(di��o)��PWM�(q��)��(d��ng)��̖(h��o)����(j��ng)����MOsFET�(q��)��(d��ng)оƬIH4427�Ŵ��(q��)��(d��ng)Boost�·�е�M0sFET��������ݔ���Դ늉���������Vccp��(du��)��С���ʑ�(y��ng)�È�(ch��ng)�ϣ�����MOSF��T�_�P(gu��n)늉��c������^С��MOSFET����ֱ����TL494ݔ���(q��)��(d��ng)���������O�������(q��)��(d��ng)������Ҫ���T���(q��)��(d��ng)оƬ��
B00st�����·�У�PWM�(q��)��(d��ng)��̖(h��o)�}���O(sh��)�Þ��λ���ք�(d��ng)�{(di��o)��(ji��)(�D2�����R1)���@�ӿ���ʹԓ�·�m���ڲ�ͬ����늄�(d��ng)�C(j��)�Č�(sh��)�(y��n)�о����������늄�(d��ng)�C(j��)�̶���B00st�·ݔ��늉���ֵҲ�Ϳ��Դ_����������BO0st�·ݔ�������ط�����T1494�}���{(di��o)��(ji��)���^�ˣ���(g��u)���]�h(hu��n)�Y(ji��)��(g��u)��
Boost������·��ݔ��늉�Vccp����ֱ��ĸ��늉���ֱ��������Lc�C���·�е�MOsFET(��Ҋ�D5)���Á����늙C(j��)��늉�ֵ���·�������ֵ��Դ�Ԟ�ݔ���Դ늉�Vcc���cVccp�o�P(gu��n)��
��(du��)�ڃ����в�����늄�(d��ng)�C(j��)���D1�е�PgWM�l(f��)����Ԫ�a(ch��n)����·����90����PwM��̖(h��o)����(j��ng)��λ�{(di��o)��(ji��)�����l�ȭh(hu��n)��(ji��)�����Ƀ�����·PwM������̖(h��o)���ٽ�(j��ng)��̖(h��o)�Ŵ�h(hu��n)��(ji��)�(q��)��(d��ng)�_�P(gu��n)������(d��ng)����
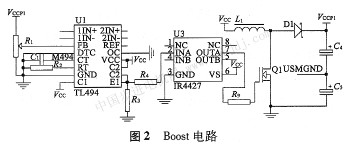
�D3�o�����(q��)��(d��ng)�·��PwM�l(f��)����Ԫ��ԭ��D����T1494��(sh��)�F(xi��n)��TL494�Ĺ����l�ʿ�����ʽ���ƴ_����
�D3�У�R11����{(di��o)�λ������ʽ(3)��֪���{(di��o)��(ji��)R11��ʹT1494ݔ���m��(d��ng)�l�ʵ�PwM��̖(h��o)���D3�·�У�TL494ݔ����̖(h��o)���}���O(sh��)����****ֵ��
���೬��늄�(d��ng)�C(j��)���(q��)��(d��ng)��Ҫ������·����90����PwM������̖(h��o)�������D3�·ݔ�����ǃ�·����180����PwM��̖(h��o)���@��·��̖(h��o)��Ҫ�քeͨ�^�����l�·�����Ƀ�����·����90����PWM��̖(h��o)��
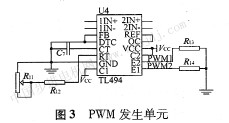
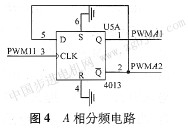
�����l�·��һ�N������(sh��)���·��ͨ����D�|�l(f��)����(g��u)�ɡ��D4�o����һ��(A��)PWM��̖(h��o)�Ķ����l�·ԭ��D���D��оƬCD4013���p������D�|�l(f��)��.
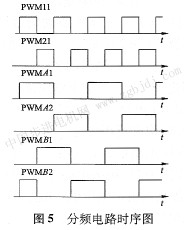
�D5�o���������l�·�ĕr(sh��)��D���ɈD5���Կ����������l�·ݔ����̖(h��o)��ռ�ձȹ̶���ٷ�֮50���l�ʞ�TM94ݔ����̖(h��o)�l�ʵ�1��2���{(di��o)��(ji��)�D3�е�R11,�Ϳ����{(di��o)��(ji��)PWM�h������̖(h��o)���l�ʡ���(du��)�ڲ�ͬ�ij���늄�(d��ng)�C(j��)�������x����m��R��c(�D3�е�R11,R12��C7)��(sh��)ֵʹ�l�ʿ��{(di��o)�����c����늄�(d��ng)�C(j��)���������m��(y��ng)��
���B��PwM��̖(h��o)�Ķ����l�·ͬ�Ӳ��ÈD4��ʾ�Y(ji��)��(g��u)���tA��B��������l�·���ચ(d��)�������]�·����_ʼ�����r(sh��)�̵��·��B(t��i)���˕r(sh��)���ɂ�(g��)D�|�l(f��)����ݔ����B(t��i)�����_����ݔ��Q�����Ǹ��ƽ��Ҳ�����ǵ��ƽ�����ң��˕r(sh��)�D3��PwM�l(f��)����Ԫ�У�T1494�o���ă�·PwM������̖(h��o)���Ⱥ����Ҳ���_����������PwMl���ȣ�Ҳ������PwM2���ȡ������D5��֪���ɴˌ���(d��o)������l�·ݔ���ă���PwM������̖(h��o)����λ�P(gu��n)ϵ���_����һ����늵õ�����PwMAl��ǰPwMBl��̖(h��o)90��(��D5��ʾ)����һ����늾Ϳ�����PWMAl����PWMBl��̖(h��o)90����
PwMAl�cPwMBl��̖(h��o)֮�g�ij�ǰ�������P(gu��n)ϵ����(du��)��(y��ng)��늙C(j��)�����D(zhu��n)���D(zhu��n)������֮�g����λ�P(gu��n)ϵ���_����Ҳ����ζ��ÿ���(q��)��(d��ng)�·��늺�늙C(j��)���D(zhu��n)�_�����@�ӵ��(q��)��(d��ng)�·�Ǜ]�Ќ�(sh��)�Ãr(ji��)ֵ�ġ����Q�@һ���}�������4��ղ��������l�·֮�g����(li��n)ϵ���γɼs���P(gu��n)ϵ��
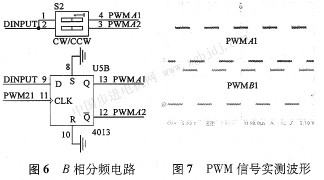
�D6�o��������PwM��̖(h��o)�ķ��l�·ԭ��D���D�з��lD�|�l(f��)����ݔ��D��̖(h��o)���ǁ������䷴��ݔ�������ǁ�����A����lD�|�l(f��)����ݔ����̖(h��o)PwMAl��PgMA2����(d��ng)PwMAl����B����lD�|�l(f��)����ݔ��D��̖(h��o)�������CPwMAl��ǰPg��MBl��̖(h��o)����D7��ʾ����(du��)��(y��ng)��늙C(j��)���D(zhu��n)����(d��ng)PWMA2����B���D��̖(h��o)���tʹPwMAl����PwMBl��̖(h��o)����(du��)��(y��ng)��늙C(j��)���D(zhu��n)��Pwml��PwM42֮�g���x���༴늙C(j��)�����D(zhu��n)�Ŀ��ƣ��ɈD6�ēܴa�_�P(gu��n)S2��(sh��)�F(xi��n)��
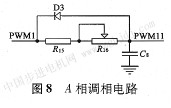
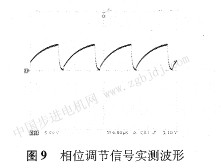
ǰ���ѽ�(j��ng)������PwM�l(f��)����Ԫ�ͷ��l�·��������������֪�����l�·�o���ă���PwM��̖(h��o)֮�g����λ�������+90����-90�������������{(di��o)��(ji��)�����ˌ�(sh��)�F(xi��n)��(du��)��λ����{(di��o)��(ji��)����PwM�l(f��)����Ԫ�c���l�·֮�g����������D��ʾ���{(di��o)��h(hu��n)��(ji��)���D8��A����{(di��o)���·��B���c֮��ȫ��ͬ��
��λ�{(di��o)��(ji��)��ͨ�^Rc�·��(sh��)�F(xi��n)�ġ��D8�У�R15,R16�cC8��(g��u)��Rc��늻�·����(d��ng)PwM�l(f��)����Ԫ��ݔ����̖(h��o)PwMl����ƽ�r(sh��)����(du��)C8��늣�PwMll��̖(h��o)��ֵ��u��������(d��ng)PwMl�S׃?y��u)���ƽ�r(sh��)��C8ͨ�^���O��D3���ٷ�늣�PwMll��̖(h��o)��ֵѸ���½����@�ӷ���(f��)�M(j��n)�г��
늣��õ���PwMll��̖(h��o)����D9��ʾ�Ĝ�(zh��n)��X����ԓ��̖(h��o)�B�ӵ��D4�ķ��l�·������D�|�l(f��)���ĕr(sh��)�ݔ�롣��?y��n)�ֻ�Ю?d��ng)ݔ����̖(h��o)��ֵ����ijһ�ض�ֵ�r(sh��)���ŕ�(hu��)���J(r��n)���Ǹ��ƽ�����ԈD8�·�����þ��nj�PwMI��̖(h��o)�������غ�����һ���Ƕȡ��{(di��o)��(ji��)�λ��R16�����Ը�׃��ݳ�����ʣ��༴�����{(di��o)��(ji��)��λ��
���l�·�o���ă�����·PwM������̖(h��o)����(j��ng)��̖(h��o)�Ŵ�h(hu��n)��(ji��)�(q��)��(d��ng)�_�P(gu��n)������(d��ng)����ݔ���m��(d��ng)?sh��)�늉��?q��)��(d��ng)����늄�(d��ng)�C(j��)���D(zhu��n)��
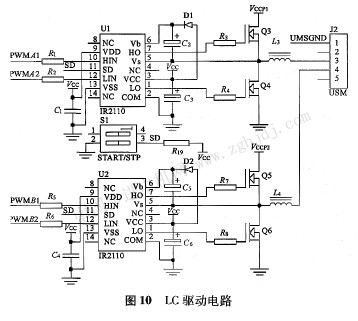
�D10�o���˃���Lc�(q��)��(d��ng)�·��ԭ��D��Lc�C���·��һ�N�������·��ʽ���乤��ԭ������Ԕ�����D10��MOSFET���(q��)��(d��ng)ʹ���ˌ����(q��)��(d��ng)оƬIR2110��
2��(sh��)�(y��n)�Y(ji��)��
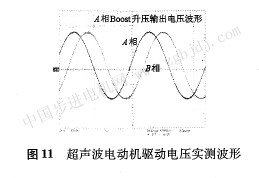
�����O(sh��)Ӌ(j��)�ѳɹ���(y��ng)���ڳ���늄�(d��ng)�C(j��)�(q��)��(d��ng)���ƣ��D11�o���˳���늄�(d��ng)�C(j��)�(q��)��(d��ng)늉���(sh��)�y(c��)���Ρ�ʹ��ԓ�·���Ԍ�(du��)����늄�(d��ng)�C(j��)���_�h(hu��n)���]�h(hu��n)�����M(j��n)���о�����(sh��)�`�C����ԓ�O(sh��)Ӌ(j��)��(sh��)�F(xi��n)���㣬���ܿɿ���
3�Y(ji��)�Z
����ᘌ�(du��)����늄�(d��ng)�C(j��)���I(y��)��Ҏ(gu��)ģ��(y��ng)�õ����������һ�Nȫ�����͵ij���늄�(d��ng)�C(j��)�ͳɱ��(q��)��(d��ng)�����·��ԓ�·ݔ���(q��)��(d��ng)��̖(h��o)���l�ʡ���ֵ����λ�����{(di��o)��������һ�Nͨ���(q��)��(d��ng)�·��(y��ng)���ڲ�ͬ�����(ch��ng)�ϡ����Ľo�����·�Y(ji��)��(g��u)�������˹���ԭ���c�O(sh��)Ӌ(j��)���������M(j��n)���ˌ�(sh��)�(y��n)�(y��n)�C��Ч�����á�
|