���ڸ��M(j��n)����z���㷨�����şoˢֱ��늄әC(j��)
�{(di��o)��ϵ�y(t��ng)�ă�(y��u)���O(sh��)Ӌ(j��)
�� �x
(���A��W(xu��)���Ĵ��ɶ�610039)
ժҪ�������şoˢֱ��늄әC(j��)���鱻�،����\(y��n)��һ�N���M(j��n)�Ļ���z���㷨�����ٶȿ������ą���(sh��)�M(j��n)���˃�(y��u)���O(sh��)Ӌ(j��)��ԓ�㷨ᘌ���Ҏ(gu��)�z���㷨����Ч�ʵͺ������Ք���ȱ�c(di��n)��ͨ�^���μ��η��c���m��(y��ng)�z���㷨��M���γ���һ�Nȫ�փ�(y��u)���㷨�����M(j��n)�з���������(y��n)�C���C��(sh��)�˲���ԓ�㷨�_�����Ã�(y��u)���{(di��o)�����ܵ�Ŀ�ģ�
�P(gu��n)�I�~�����şoˢֱ��늄әC(j��)�����M(j��n)����z���㷨������
�ЈD���̖��TM33 �īI(xi��n)��(bi��o)�R�a��A ���¾�̖��1004��7018(2008)01��0037��03
0 ����
���şoˢ�A��늄әC(j��)���øߴ��ܷe�������w��ţ����нY(ji��)��(g��u)���Ρ��w�eС�������p���D(zhu��n)�ӑT��С���ӑB(t��i)���Ժá�늚�r(sh��)�g����(sh��)С���D(zhu��n)�ز���С��������(sh��)�ߡ�푑�(y��ng)��ȃ�(y��u)�c(di��n)���ڸ߿��ƾ����c�߿ɿ��Եȷ����@ʾ���ă�(y��u)Խ���ܣ�ʹ�����şoˢֱ��늄әC(j��)�{(di��o)��ϵ�y(t��ng)���ɞ鮔(d��ng)���{(di��o)���I(l��ng)���о��еğ��T�n�}��
1���şoˢֱ��늄әC(j��)�ٶȿ������ă�(y��u)���O(sh��)Ӌ(j��)
1��1�ٶȿ���ϵ�y(t��ng)�Ę�(g��u)�ɼ�����ԭ������
���şoˢֱ��늄әC(j��)�ٶȿ���ϵ�y(t��ng)����������D(zhu��n)�كɂ�(g��)���ƭh(hu��n)��(ji��)��(g��u)�ɣ���D1��ʾ����������h(hu��n)�����(n��i)�h(hu��n)�����ٶȭh(hu��n)�t������h(hu��n)�������ٶ��c�ٶȷ������γ�ƫ���(j��ng)�^�ٶ��{(di��o)��(ji��)���{(di��o)��(ji��)��a(ch��n)����������������c�����������ƫ�(j��ng)�^����{(di��o)��(ji��)���{(di��o)��(ji��)���γ�PWMռ�ձȵĿ�����ȥ����������׃���������Ķ���(sh��)�F(xi��n)늄әC(j��)���ٶȿ��ơ�Ҫ��(g��u)���������õ��ٶȿ���ϵ�y(t��ng)���P(gu��n)�I��Ҫ���ø��õă�(y��u)���㷨���ٶ��{(di��o)��(ji��)����PI����(sh��)�M(j��n)�Ѓ�(y��u)���O(sh��)Ӌ(j��)�����đ�(y��ng)�ø��M(j��n)�z���㷨���ٶ��{(di��o)��(ji��)����PI����(sh��)�M(j��n)�Ѓ�(y��u)����
1.2��������(y��u)��ģ�͵Ľ���
���ڸ��M(j��n)�z���㷨��(y��u)�����ٶȿ���ϵ�y(t��ng)ģ�ͽM����D2��ʾ��
��?y��n)����şoˢֱ��늄әC(j��)�ٶȿ���ϵ�y(t��ng)��(������)��ts(�{(di��o)��(ji��)�r(sh��)�g)�ɂ�(g��)����ָ��(bi��o)�����ٶ��{(di��o)��(ji��)����(y��u)���O(sh��)Ӌ(j��)���΄�(w��)���ǾC���{(di��o)������ָ��(bi��o)��ʹ֮�_(d��)���Ñ��ܝM���****�Y(ji��)�����҂������{(di��o)��(ji��)���ij�Ҏ(gu��)�����O(sh��)Ӌ(j��)������Kp��Ti�ăɂ�(g��)����(sh��)ֵKp��Ti��Ȼ���ڴ˃ɂ�(g��)��(sh��)ֵ�������ɳ�ʼ�NȺ���@�N�����ɳ�����ó�Ҏ(gu��)�����O(sh��)Ӌ(j��)���ĺ����(n��i)�ˣ�ʹ�������g���sС���Ķ���Ѹ��������****�⡣
�z���㷨���{(di��o)��(ji��)�΄�(w��)��ʹ����ָ��(bi��o)J��С��ͬ�r(sh��)���˱��ⳬ�{(di��o)�����ĵ�����ָ��(bi��o)����ITAE����ָ��(bi��o)�Ļ��A(ch��)���M(j��n)���˸��M(j��n)�������ˑ��P���ܣ������{(di��o)������****ָ��(bi��o)��һ�(xi��ng)�����ǵõ�****������ָ��(bi��o)J��
ʽ�У�e(t)��ϵ�y(t��ng)�`�e(t)=r(z)һy(t)��w1��w2��w3��w4���(qu��n)ֵ����w4��w1��u(t)�������ݔ����tu�������r(sh��)�g��
�C�����������ǵõ��ٶ��{(di��o)��(ji��)���ă�(y��u)��ģ�ͷ��̞飺
���У��Ȟ�[O��1]��(n��i)�x���Ĕ�(sh��)��Kp��Ti�ǰ��ճ�Ҏ(gu��)�����O(sh��)Ӌ(j��)���O(sh��)Ӌ(j��)�����ٶ��{(di��o)��(ji��)������(sh��)ֵ��
1��3���M(j��n)�z���㷨���㷨�O(sh��)Ӌ(j��)
ᘌ������z���㷨��ȱ�ݣ�ͬ�r(sh��)Ҳ����ʹ�z���㷨��(y��ng)���ڟoˢֱ��늄әC(j��)ϵ�y(t��ng)�r(sh��)����****���ܣ������ڷ������N���ø��M(j��n)�z���㷨�Ļ��A(ch��)�ϣ���ȡ�������ĺ����(n��i)�ˣ��γ���һ�N���M(j��n)�Ļ���z���㷨�������şoˢֱ��늄әC(j��)�ٶ��{(di��o)��(ji��)����PI����(sh��)�M(j��n)���˃�(y��u)���O(sh��)Ӌ(j��)��ȡ���˝M���Ч����
1��3��1����(sh��)���a
���ڌ����şoˢֱ��늄әC(j��)�ٶȿ������M(j��n)�Ѓ�(y��u)���O(sh��)Ӌ(j��)��(sh��)�|(zh��)����һ��(g��)����S���߾���Ҫ��Ĕ�(sh��)�W(xu��)����(sh��)ģ���M(j��n)�Ѓ�(y��u)���O(sh��)Ӌ(j��)�Ć��}�����ʹ�ö��M(j��n)�ƾ��a�ķ�������ʾ��(g��)�w������������ȱ�c(di��n)��
(1)�ö��M(j��n)�ƾ��a�������B�m(x��)����(sh��)�xɢ���r(sh��)��ӳ���`���(d��ng)��(g��)�w���a�����L���^�̕r(sh��)�������_(d��)��������Ҫ����(g��)�w���a�����L���^�L�r(sh��)���mȻ����˾��a���ȣ����sʹ���z���㷨���������gѸ�ٔU(ku��)�Ķ���������z���㷨������Ч�ʡ�
(2)��������(sh��)�Ķ��M(j��n)�ƾ��a���ܾ����^��ĺ������x���@�Nȱ�������z�����ӵ�����Ч�ʡ�
(3)���M(j��n)�ƾ��a�r(sh��)��һ��Ҫ�Ƚo�����ľ����Դ_�����L����һ�����ȴ_���ͺ��y���㷨�\(y��n)���^�����M(j��n)���{(di��o)�����Ķ�ʹ�㷨ȱ���{(di��o)�����m��(y��ng)�Ĺ��ܡ�
���˿˷����M(j��n)�ƾ��a�������ڵ�ȱ�c(di��n)���Ķ�����㷨���\(y��n)��Ч�ʣ����Č�Kp��Ti�ɂ�(g��)������(y��u)�ą���(sh��)�քe��ʮ�M(j��n)�Ƹ��c(di��n)��(sh��)��ʾ�����伉(li��n)�����ľ��a���������w�ǣ��O(sh��)����(sh��)Kp E[Kpmin,Kpmax],TiE[Iimin,Timax]�����@�ɂ�(g��)����(y��u)������(n��i)��ʮ�M(j��n)�Ƹ��c(di��n)��(sh��)������һ��ɞ�һ��(g��)��(g��)�wX(t)���䌦��(y��ng)�ą���(sh��)���a��ʽ���£�
1��3��2���ɳ�ʼ�NȺ
�Ȱ����{(di��o)��(ji��)���ij�Ҏ(gu��)�����O(sh��)Ӌ(j��)����������Kp��Ti�ăɂ�(g��)����(sh��)ֵKp��Ti�����ĵ�Kp=114��5��Ti=O 014��Ȼ���ڴ˃ɂ�(g��)��(sh��)ֵ�������ɳ�ʼ�NȺ���@�N������ʹ�������g�sС���Ķ���Ѹ��������****�⡣
1.3.3�m��(y��ng)�Ⱥ���(sh��)�Ĵ_�����m��(y��ng)��ֵ��Ӌ(j��)��
�m��(y��ng)�Ⱥ���(sh��)���x�����������(j��)���������u�r(ji��)��������ܺ��M(j��n)���ĽKֹ�l��������PI����(sh��)��(y��u)������Ŀ��(bi��o)����(sh��)�ĘOСֵ���}������ʹ����ָ��(bi��o)����С�����z���㷨�nj����m��(y��ng)��****�Ľ⣬���Ҫ��Ŀ��(bi��o)����(sh��)�M(j��n)�и��죬���OСֵ���}�D(zhu��n)�Q��O��ֵ���}���� �Ķ��x�m��(y��ng)�Ⱥ���(sh��)  ����ʽ(1)�M(j��n)���xȡ)���@�Ӯ�(d��ng)�ҵ���****�m��(y��ng)�ȵĽ⣬Ҳ���ҵ�����СĿ��(bi��o)����(sh��)ֵ�Ľ⣬��(y��u)���ɹ��� 1��3��4���M(j��n)�z���\(y��n)���O(sh��)Ӌ(j��)
(1)�x���\(y��n)���O(sh��)Ӌ(j��)
�ژ�(bi��o)��(zh��n)�z���\(y��n)����x����������У����x������(j��)��Ҫ�Ǹ���(g��)��(g��)�w�m��(y��ng)�ȵľ��w��(sh��)ֵ��һ��Ҫ������ؓ(f��)ֵ���@��ʹ���҂����x�����֮ǰ����Ȍ�һЩؓ(f��)���m��(y��ng)���M(j��n)��׃�Q̎�������IJ��õ����ڽ���ǰ�M(j��n)��������x�������x����ʵĴ�С�飺Ps
���m��(y��ng)ֵ����(sh��)�������P(gu��n)ע���ǂ�(g��)�w�m��(y��ng)��֮�g�Ĵ�С�P(gu��n)ϵ��������(g��)�w�m��(y��ng)���Ƿ�ȡ��ֵ��ؓ(f��)ֵ�Լ���(g��)�w�m��(y��ng)��֮�g�Ĕ�(sh��)ֵ��̶Ȳ��o�eҪ��
(2)���M(j��n)�Ľ����׃���\(y��n)���O(sh��)Ӌ(j��)
���IJ��������m��(y��ng)�Ľ����׃�����㷨���M(j��n)���z��������ʹ�ý������Pc��׃������pm���S�z������(sh��)�����Ӷ������Ԅ��{(di��o)����������O(sh��)Ӌ(j��)˼���ǣ���(d��ng)�m��(y��ng)��ֵ����ƽ���m��(y��ng)��ֵ�r(sh��)���f��ԓ��(g��)�w�����ܲ��õĂ�(g��)�w�������Ͳ����^��Ľ����ʺ�׃���ʣ�����m��(y��ng)��ֵ����ƽ���m��(y��ng)��ֵ���f��ԓ��(g��)�w���܃�(y��u)������������(j��)���m��(y��ng)��ֵȡ����(y��ng)�Ľ����ʺͮ��ʡ����Կ�������(d��ng)�m��(y��ng)��ֵԽ�ӽ�****�m��(y��ng)��ֵ�r(sh��)�������ʺ�׃����ԽС����(d��ng)�m��(y��ng)��ֵ����****�m��(y��ng)��ֵ�r(sh��)�������ʺ�׃���ʵ�ֵ���㡣�@�N�{(di��o)����������Ⱥ�w̎���M(j��n)�����ڱ��^���m���������M(j��n)�����ڲ�������?y��n)��M(j��n)������Ⱥ�w�е��^��(y��u)�Ă�(g��)�w��̎��һ�N���l(f��)��׃���Ġ�B(t��i)�����˕r(sh��)�ă�(y��u)����(g��)�w��һ���ǃ�(y��u)����ȫ��****�⣬�@����ʹ�M(j��n)������ֲ�****��Ŀ��������ӡ���ˣ��������M(j��n)һ���ĸ��M(j��n)��ʹȺ�w��****�m��(y��ng)��ֵ�Ă�(g��)�w�Ľ����ʺ�׃���ʲ����㣬�քe��ߵ�0��6��0��001���@������(y��ng)�������Ⱥ�w�б��F(xi��n)��(y��u)���Ă�(g��)�w�Ľ����ʺ�׃���ʣ�ʹ����
������̎��һ�N����ͣ����ǰ�Ġ�B(t��i)�����˱��Cÿһ���ă�(y��u)����(g��)�w�����Ɖģ����þ�Ӣ�������ԣ�ʹ����ֱ�ӏ�(f��)�Ƶ���һ���С�����M(j��n)��Ľ������pc��׃������Pm��Ӌ(j��)����_(d��)ʽ��
ʽ��:fmax��NȺ��****���m��(y��ng)��ֵ;favg��ÿ���NȺ��ƽ���m��(y��ng)��ֵ��f��Ҫ����ăɂ�(g��)��(g��)�w���^����m��(y��ng)��ֵ;f��Ҫ׃���Ă�(g��)�w���m��(y��ng)��ֵ��
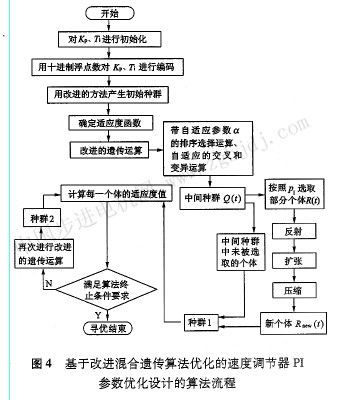
1��3 .5�ֲ���(y��u)��������һ�μ��η��ļ���
���ڱ��������õĻ���z���㷨�����m��(y��ng)�����z���㷨�c�μ��η����ЙC(j��)�Y(ji��)�ϣ���ֲ�����������(qi��ng)�Ćμ��η��ļ����(zh��)���^����D3��ʾ��
1��3��6�Д��M(j��n)���Kֹ�l���Ƿ�M��
�ڌ�(sh��)�F(xi��n)�z����(y��u)���r(sh��)�����l(f��)�F(xi��n)ռȺ�wһ�������Ă�(g��)�w�ѽ�(j��ng)��ȫ��һ��(g��)��(g��)�w������Ⱥ�w�д����(sh��)��(g��)�w���m��(y��ng)��ֵλ��ijһֵ�����r(sh��)���t�J(r��n)���z�������ѽ�(j��ng)�Ք������ԽKֹ�㷨��������˱��ĵ��㷨�����Kֹ�l�������˷NȺ�Ђ�(g��)�w��ƽ���m��(y��ng)���c��(d��ng)ǰ�NȺ��****�m��(y��ng)�ȵı�������һ���ķ���֮��(n��i)����****�m��(y��ng)��ֵ����С�m��(y��ng)��ֵ֮��С��ijһ�ֵ���t���ز��E1��3 4��1 3��5�؏�(f��)�����\(y��n)�㣬ֱ���M���ֹ��
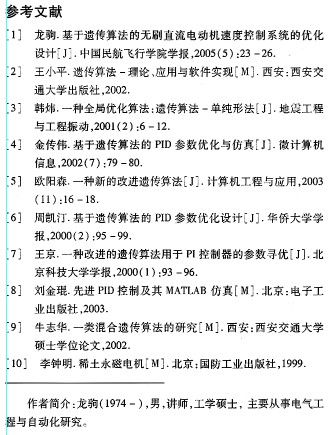
1��4���M(j��n)����z���㷨�Č�(sh��)�F(xi��n)���E�����O(sh��)Ӌ(j��)
����(j��)�����㷨�O(sh��)Ӌ(j��)�����������㷨�^�̣����IJ���MATLAB��m�Z�Ծ���������(y��ng)�ķ���ܛ����������(y��ng)�Č�(sh��)�F(xi��n)���E�����O(sh��)Ӌ(j��)��D4��ʾ��
2���挍(sh��)�(y��n)
����Ԫˢֱ��늄әC(j��)�ٶȭh(hu��n)��Ч���،���Ă� �f����(sh��)��  (1)���ճ�Ҏ(gu��)�O(sh��)Ӌ(j��)���õ���PI����(sh��)�飺Kp=114��53��Ti=0��014��
(2)��(y��ng)�Ø�(bi��o)��(zh��n)�z���㷨���ٶ��{(di��o)��(ji��)���M(j��n)�Ѓ�(y��u)���O(sh��)Ӌ(j��)������慢��(sh��)���O(sh��)�Þ飺�NȺ��(sh��)M=30���������pc=O��6��׃����Pm=O��Ol���M(j��n)������(sh��)Gen=100��
(3)��(y��ng)�ø��M(j��n)�z���㷨���ٶ��{(di��o)��(ji��)���M(j��n)�Ѓ�(y��u)���O(sh��)Ӌ(j��)�����慢��(sh��)�O(sh��)�Þ飺�NȺ��(sh��)��=30���x���m��(y��ng)ֵ����(sh��)d=l��������ʺ�׃�����ʰ���ʽ(2)�M(j��n)���O(sh��)�ã��M(j��n)������(sh��)Gen=100��ȡw1=O��905��w2=0��000 8��w3=1��5��w4=95���μ��η��ą���(sh��)�O(sh��)�ã����������ĴΔ�(sh��)N=15����������p1=0��5������ϵ��(sh��)r=l���U(ku��)��ϵ��(sh��)a=2������ϵ��(sh��)B=0��75��
������MATLAB�Z�Ծ����M(j��n)���˷��挍(sh��)�(y��n)���õ������N�O(sh��)Ӌ(j��)��������(y��ng)���D(zhu��n)���A�S푑�(y��ng)��������D5��ʾ��ͬ�r(sh��)���@���N�O(sh��)Ӌ(j��)�������õ�������ָ��(bi��o)�����^���Y(ji��)�����1��ʾ�������҂����Կ��������ø��M(j��n)�z���㷨��(y��u)���ٶȿ�������֮���ó�Ҏ(gu��)�z���㷨�Լ������O(sh��)Ӌ(j��)����ʹ�{(di��o)��ϵ�y(t��ng)���и���(y��u)�ĕr(sh��)�����ܣ����{(di��o)���Ҹ�С���{(di��o)��(ji��)�r(sh��)�gts���̣��Ķ��ܸ��õ��m��(y��ng)���I(y��)���a(ch��n)�^�̿��Ƶ���Ҫ���������˿���ϵ�y(t��ng)�������ԡ�
|