����늄әCʸ��ģ�͵�Matlabܛ�����漰�䑪��
���գ�ꐄ�
(�Ͼ����̌WԺ�����K�Ͼ�211167)
ժҪ������Matlab simulink�����ˮ���늄әCʸ�����Ʒ���������������D�Ӵ��Ӌ��ģ�ͼ�����늄әCʸ��ģ�ͣ�̽ӑ���@Щģ�͵Č��Hʹ�Æ��}���鷽��̌W�͌W�����ʹ�ã�߀���@Щģ���M���˷��b��
�P�I�~���D�Ӵ��Ӌ��ģ�ͣ�����늄әCʸ��ģ�ͣ�Mat1ab��Slmullnk
�ЈD���̖��TM343 �īI���R�a��A ���¾�̖��1004��7018(2008)0lһ0031��04
Oǰ��
Ŀǰ������늄әC����ϵ�y�M�з���r�����õĮ���늄әCģ�Kȡ��Matlab slmulink���еĮ���늄әCģ�K����Dl��ʾ������늄әCģ�K�������ăȲ��Y����D2��ʾ���ĈD2�˂�����������늙C��Փ�Į���늄әCģ�K���ڽY�����oՓ�nj����о�߀�nj��ڽ̌W���f������ʮ�ֲ���ġ��W���o�����̲��ϵĮ���늄әC������Փͬ����ģ�K�Y���������������о��ߣ��t�o���x���{��ģ�K�Y��������ֵ��
��ˣ�����Matlab simulink�����ˮ���늄әCʸ�����Ʒ���������������D�Ӵ��Ӌ��ģ�ͼ�����늄әCʸ��ģ�ͣ��ɹ��̌W��������rʹ�á���ݔ�붨�����������늄әC��������r�£����Եõ�����������ݔ�����Σ����̲��г�����ַ����D׃��ֱ�^����������ݔ�����Σ����@�ø��õĽ̌WЧ�����@Щģ��߀�����Á��о�����늄әC���^���^�̣�Ҳ�����Á혋�����N����ϵ�y������ֹʹ���^���Ќ��@Щģ�K�M���`�ģ����@Щģ�K
�M���˷��b�����������������f�����Է��㌍�Hʹ�á�
1����늄әCʸ��ģ�ͷ���
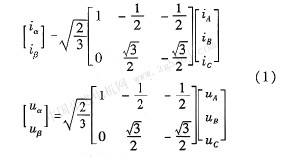
���ծ���늄әC�Č��H����ģ���������ĄӑB���Wģ����һ�����A���Ǿ��ԡ�����ϵ�ϵ�y��ֱ�ӷ�����Ӌ���@�ӵķ��̽M��ʮ�ֲ���ģ��˂��о��˲�ͬ�ĺ�������������ʸ��׃�Q����������һ�N��ʸ��׃�Q����Ŀ����ģ��ֱ��늙C�Ŀ��ƙC�����팦����늄әC�M�п��ƣ������˼���ǣ������M������׃�Q�����������oֹһ�����oֹ׃�Q(3��2׃�Q)�������ཻ�����iA��iB��iC��׃�Q�ɶ����oֹ����ϵ�ϵĽ������i����i���������oֹ�������D׃�Q(2��2׃�Q)���������oֹ����ϵ�ϵĽ������i����i��׃�Q�ɶ������D����ϵ�ϵĽ������id��iq������d�S�����D�Ӵ��ʸ���ķ�����q�S���D���D�����D90�������w����׃�Q���̽M���¡�1.1�����oֹ-�����oֹ����׃�Q���̶����o������ϵ�Q���-������ϵ,ȡ �S�cA�S�غ�,���ÿ����ʲ�׃��ԭ�t,�t:
1.2�����oֹ-�������D����׃�Q����
�������D����ϵȡM-T����ϵ,M�S�c���S�ĊA�Ǽ���ս�.
1.3�������D����ϵ�µĴ�朡�늉���늴��D�ط���
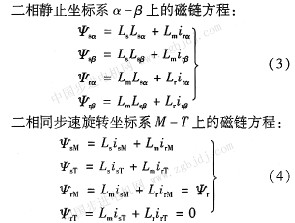
1.3.1 ��朷���
�����oֹ����ϵ��-���ϵĴ�朷��̣�
ʽ�У�Lms��������������ϵ�ж����D��ÿ���@�M��****���У�
Lm�������������D��ͬ�S��Ч�@�M�g�Ļ��У� Lm=3/2Lm;
Lm�����������ӵ�Ч�����@�M���ԸУ�Ls=Lm+L1s;
Lm�����������ӵ�Ч�����@�M���ԸУ�Lr=Lm+L1r;
1��3��2늉�����
�����oֹ����ϵ��-���ϵ�늉����̣�
����ͬ�������D����ϵM-T�ϵ�늉����̣�
ʽ�У���1�������D����ϵ�����ڶ��ӂ��oֹ����ϵA��B��c�S��늽��ٶȣ�
�ء����D�����D��늽��ٶȣ�
��1-�ء������D����ϵ�������D�ӂ��oֹ��
��ϵ��a-b��c�S��늽��ٶȡ�
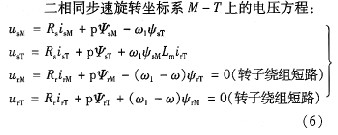
1��3��3늴��D�ط���
ʽ�У�P�����O������
���M�S���D�ӿ���朦�r�ķ���T�S��ֱ��M�S�����Ԧ�rm=��r����rT=0������늄әC��׃�l����늣��O���ӂ��������iA��iB��iC����֪���������Ķ������D����ϵ�µĴ�朷��̼�늉����̣���ȥirM��irT,��sM,��sT�ɵ������ַ��̽M��
2����늄әC����ģ��
����늄әC�����ݔ������׃�l��ݔ���Č��Q���ཻ�������ݔ�����鮐��늄әC��늽��ٶȦء�늴��D��Te���D�Ӵ�朦�r��
��ʽ(8)�ɵã�  ʽ(10)��ʽ(11)���D�Ӵ�朶���Į���늄әC�ӑBģ�͵��ַ��̡�
�����D����׃�Q�_ʼ��ֱ����������늄әC����ģ�ͣ��҂���������D�Ӵ��ʸ���ĿՆ�늽ǶȦռ��D�Ӵ�朦�r�Ĵ�С�����ڷN�Nԭ��ֱ�Ӝy���@Щ�����Dz����ܵģ�ֻ��ͨ�^�D�Ӵ��ģ��Ӌ����@�æռ���r�Ĕ�ֵ��
2��1�����D�Ӵ��ģ��
���ö��ӂȃ�������ϵ�ϵ������늉����D�ӽ��ٶȦ�Ӌ��ռ���r.
2��1��1�����oֹ����ϵ�����is����is��Ӌ��ռ���r�����ģ��
����ʽ(3)�Ѓɂ��D�Ӵ�朷�����ra����rB���̣��Լ�ʽ(5)�Ѓɂ��D��늉�����ura,urb���̣���ȥ���е��D�����ira��irb�ɵ��D�Ӵ�朦�ra����rB��Ӌ�㹫ʽ��
����ʽ(13)���ɽ��������oֹ����ϵ�ϵ�Ӌ���D�Ӵ�朵����ģ�ͣ�ݔ����̖�����is����is��ݔ����̖��ռ���r��
2��1��2�������D����ϵ�����isM��isTӋ��ռ���r�����ģ��
����ʽ(11)��ʽ(12)�ɵ��D�Ӵ�朦�r���յ�Ӌ�㹫ʽ��
����ʽ(14)���ɽ����������D����ϵ��Ӌ���D�Ӵ�朵����ģ�ͣ�ݔ����̖�����isM��isTݔ����̖�馵����r��ԓģ��Ҫ��Q�ó����h����ʼ��B�³�������Ć��}��
2��1��3�����oֹ����ϵ��늉�us����us��Ӌ�㦵����r����늉�ģ��
����ʽ(5)���oֹ�ă�������ϵ�ϵĶ���늉�usa��usb�c������Pϵ���̣��Լ�ʽ(3)���oֹ�ă�������ϵ�ϵăɂ��D�Ӵ�朷���ɰ���̣���ȥ���е��D�������i�����ɵû���늉���ra����rB��Ӌ��ķ��̣��D13----����ʽ(15)���ɽ���Ӌ���D�Ӵ�朵�늉�ģ�ͣ�ݔ����̖�馵����r����Ӳ���·�У�����ֱ���Զ�������Ͷ���늉�����ݔ����̖�����ڷ���r���ڃH�ж������ݔ�����r�£�����ͨ�^ʽ(5)Ӌ��õ�늉�us��,us��,һ������ݔ����̖��
�������N�D�Ӵ��Ӌ��ģ�͏���Փ���v����һ�ӵģ����ڌ��H������߀���в�e�ġ����ģ�͡�늉�ģ�͑��Y������ʹ�á�
2��2����늄әC���wʸ������ģ��
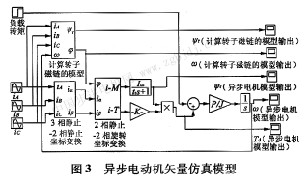
���ඨ�����iA��iB��iC���鮐��늄әC��ݔ����̖��늴��D��Te���D�Ӵ�朦�r�����D�٦؞�ݔ����̖������ʽ(9)��ʽ(11)���ɵ������Į���늄әCʸ������ģ����D3��ʾ���O������늄әC�ą����飺R1=1.73����X1��=4 ����R2=1��04 ����X2��=4����Rm=4��46 ����Xm=61��1 ����IN=6��7 A��
��������늄әCʸ������ģ�ͱ�횿��]������������D�Ӵ��Ӌ��ģ�͡��քe����Ӌ���D�Ӵ�朵��o�B���ģ�ͼ��ӑB���ģ�͘�������늄әCʸ������ģ�͕r��������Ք������Ϊ�ʹ��Ӌ���D�Ӵ�朵�늉�ģ�ͽ�������늄әCʸ������ģ�͕r�����治�Ք���
�@��Ҫ������늉�ģ�Ͱ������e�֭h�����ڵ��ٕr�`���^��ˣ��������ģ���c늉�ģ����ϵIJ��ԣ����ڵ��ٕrʹ�����ģ�ͣ����ٕrʹ��늉�ģ�͡����^�{ԇ���@�����Ք��Į���늄әCʸ������ģ�͡�
3�Y�Z
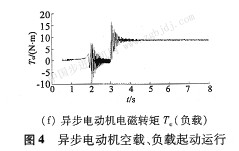
�քe�������N����늄әCʸ��ģ�ͣ�������늄әC���d���ӡ�ؓ�d�\���M�з��档�ķ���Y��������ᘌ�ͬһ�N�\����r�����N����늄әCʸ��ģ�����õ��ĽY����һ�µġ�����ƪ�����H�г��������D�������ģ���c늉�ģ�ͽY�ϵĻ���D�Ӵ��ģ�����õķ���Y������D4��ʾ��ؓ�d�ļ��d�r��
ͨ�^���ΈD���Կ���,��t-3s�r,�r��늄әC�ѻ����M�뷀�����d�\�Р�B������ؓ�d���Ժ�늙C���^һ���^���^�̣��M�뷀����ؓ�d�\�Р�B����r�������ͣ��D��Ҳ�����½�����Ҋ��ԓ����ģ�Ϳ��Էdz������ֱ�^���о�����늄әC���^���^�̡����⣬����ģ��Ҳ�������x��ر��Á혋������늄әC�Ŀ���ϵ�y��
����ڑ���ģ�ͣ���ֹ��ģ�͟o��ĸĄӣ��б�Ҫ��ģ���M�з��b�������ƌ�Ԓ��͈D�ˡ�
|