���ڏ����S�h�����в��ͳ���늄әC˲�B����
�V������S����ƽ������������c
(�㽭��W���㽭��ئI 310027)
ժҪ��Ӌ�����S���ȭh���ď��ԺͶ��D�������fģ�ͣ�����������˲�B���Ե��\���ַ��̣����o����⡣���ó���˲�B���Ԝyԇϵ�y����S�͌����C������ģ�͵Ĝʴ_�ݺ���Ч�������L�cָ��rӰ�푑��r�g������ϵ����Ҫ��Դ�ڽ��|���Ħ�����ᣬ����늙C�D�S��Ħ�����ᡣ
�P�I�~���в��ͳ���늄әC�������S����˲�B����
��Ȧ���̖��TM35 �īI���R�a��A ���¾�̖��1004��7018(2008��01��0017һ04
�� ��
����늄әC��ͨ�^���l��Ӻ�Ħ���ӵ�늙C�����нY�����Ρ�푑��ٶȿ졢������i�����ٴ��D�ص����c�������ٴ��D�ص��������S���O�����ѽ��õ���֑��á�����늄әC�ĸ߷ֱ��ʺͲ��M�����c��푑��ٶȿ����P����ˌ���˲�B���Ե��о����H�����ڌ�����늄әC���J�R��������ڸ��õؑ����@һ���c��
Ŀǰ����������늄әC��˲�B���ԕr�Ѓɂ����c��һ��ͨ�������S����늙C�S���B�ӭh���ď��ԣ����Ä����B�ӵ�ģ�́����������W����[1-5]���@��늙C�\�еķ��B���Է���Ӱ푲�����늙C���ӻ��ߔ�����i�r˲�B�^�̵����Է�����Ӱ푅s�dz�ͻ�����@�ӵ�ģ���c���H�ù�늾��a���B�ӵĜyԇϵ�y��һ���ij��롣���������ķ�����늙C�S������ϵ�������ñ��R�ȷ�����ȱ����a��ԭ�����ҪӰ����صĶ��������������������c��������
�돗���S��ģ�ͺͶ��D��Ħ���������fģ�ͣ��������������ַ��̣����o�������⡣ͬ�rͨ�^�yԇϵ�y���F�˳���늄әC��˲�B���Ԝyԇ������Փ�͌��ɷ��������˲�B���ԡ�
1˲�B���Ե���Փ����
1.1���}���������Wģ��
����늄әC���Ӻ��P���˲�B�^�̾������ɂ��A�Ρ��������^�̵ĵ�һ���A�Σ����ӱ����в����������˲�g����������������B������D��̎��һ���^�͵��D�٣��ڶ����A�Σ��D�Ӽ���ֱ�����B�D�٣�������ɡ�ͬ�ӣ����P���^�̵ĵ�һ���A�Σ����ӱ����в�������P��˲�g�ķ��B���˥�p���㣬�в���ʧ���D���_ʼ�p�٣��ڶ����A�Σ��D���^�m�p�����D�ٞ��㣬늙C�P�ࡣ
���Ӻ��P���^�̵ĵ�һ���A�ξ��鶨���в�׃�����A�Ρ�һ����f���ڷ���˲�B���ԕr�����Ժ����@һ���A�Σ����J�鶨�ӱ����в���׃�����A�S푑����@�ӼȺ����˔��Wģ�ͣ������˷�����ͬ�rҲ�������̫����`��ܺܺõط�ӳ����늄әC�ķ��B���ԣ�������˲�B�^���У����ڳ���늄әC���D��׃���^�죬�����B��ģ���ѽ����ܜʴ_��ӳϵ�y���D��׃��Ҏ�ɣ��e�ǜyԇϵ�yһ���c��늾��a��ͨ�^�S�������S���c늙C�S��늾��a
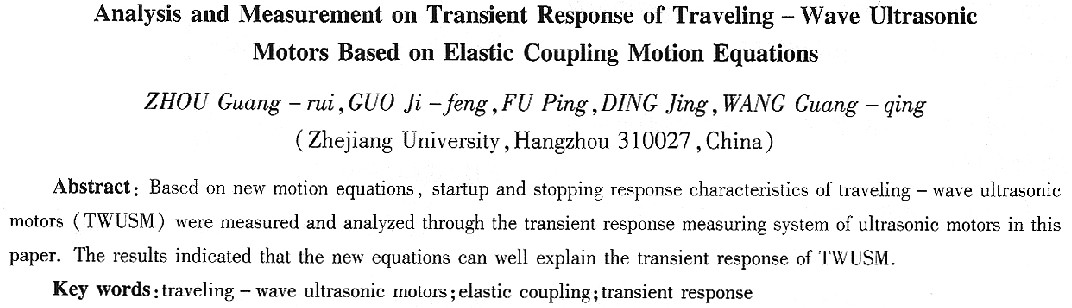
���S���ֵď��ԭh����횿��]����˱��Č���һ��˲�B���Ԝyԇϵ�y����D1��ʾ���Wģ���������D��J1�鳬��늄әC�D�Ӻ�ؓ�d���D�ӑT����J2���늾��a�����D�ӑT����k���S�h��(�����D���S��늾��a���S)�ď��Ԅ��ȣ�
�����в��ͳ���늄әC����ԭ���������]Ħ�������f���Wģ��[6]�����Եõ�늙C�����D�أ�
ʽ�У�FN��늙C���A���o����raV�鶨�D��Ħ�����|�ӵ�ƽ���돽���̞�Ħ��������������=��(��s-��r)����ه�ڶ��D�ӱ���������ٶȣ���s�鶨�ӱ����|�c�������ٶȣ���r���D�ӵ�Ħ���Ӿ��ٶȡ�
1��2�����^��
���ڈD1�����Wģ�ͣ��ɽ���ϵ�y�����^�̵��\���ַ��̣�
ʽ�У�TL��늙C��ؓ�d���أ�d����d����늙C��늾��a��������ϵ����
��ʽ(1)����ʽ(2)��������������  �ɵã� ʽ�У�M=����sFNrav-TL,N1=��r2avFn+d1������N=N1+d2����ȥ��1���õ����·��̣�
���챾�����õ�ӆ��������늄әC�����Դ_��p
������늙C�D�S���ٶȦ�1��늾��a���y���Ľ��ٶȦ�2�քe�飺
1.3�P���^��
����ǰ��ķ��������Լٶ��ڔ��һ˲�g�����в��ѽ���ʧ������s=0�����Ԍ����P���^�������·��̣�
2 ˲�B���Ԝyԇ������
2.1�yԇϵ�y
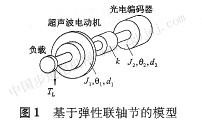
���]���yԇϵ�y���ɘӺ�̎���ٶȵ�Ҫ����늄әC˲�B���Ԝyԇϵ�yӲ���ĽM����D2��ʾ��ϵ�y��Pc�C���y���C����늾��a����������
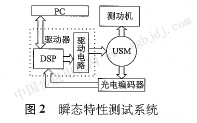
�O��M�ɡ���������DSP�����������·��DsP����TI��˾��TMS320LF2407�����C̎���ٶȡ���늾��a����EPc��˾��Model 775A�ͣ����ÈA��ţ�ͨ�^����D�Q�����S�����D��λ���D�Q����}�_��̖��늙C��ֱ��60mm���в��ͳ���늄әC���������1��ʾ���y���C�c늙C����늾��a��ͬ�S�B�ӣ�ģ�Mؓ�d�����з�����ؓ�d���{�����c��Pc��
DSP֮�g���ô���ͨӍ��
��ϵ�y�����r����Pc�C�l�����Ӻ��P��ָ��������յ�ָ���ͨ�^���·�ӳ���늄әC����늾��a�����ɼ����}�_��̖������DsP��DsP����̖����̎������ʮ���M����ʽͨ�^����ͨӍ��������λPc�C����λPc�C�����յ���ʮ���M�Ɣ������Mһ��̎����Ȼ������ɼ��Ĕ����{��MATLAB�L�����������������������������ı��͈DƬ��ʽ���档
2��2˲�B���Է���
���������W��Փ��֪��ʽ(3 )�е�N1��=��avFN+d1����������ϵ���������ɂ����֣���rav��FN��늙C���D�ӽ��|���Ħ������ϵ����d1��늙C�D���S���g��Ħ������ϵ����ͨ�^��������늙C��˲�B�^���У��D���S��Ħ������Ӱ푺�С���c���|���Ħ��
������ȿ��Ժ��ԡ�
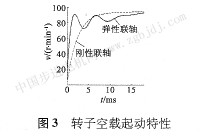
�D3��늙C�ڿ��d�r�D�ӵ����������{������Y��������̓����ʾ�S�h���鄂�ԕr��늙C���������������D���D�ٳ�ָ�����L��������ʾ늙C�����S�r���D���D�ٷ����������S�h���ď���Ӱ�ʹ�D���D���г��{����ʎ�ȬF��
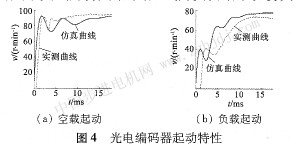
�D4����d��ؓ�d�r��늾��a���D�S�������ԣ����Ќ��������Y����̓���錍�y�Y���������
����������Ǻϣ��f�����ڏ����S�h�������Wģ�Ϳ��Խ�������^���е���ʎ�����{�ȬF����ʹ늙C�D�S�Ӵ֣�������S�h����Ť�D���ȣ��t��늾��a���y�õ����������У�����ʎ�ͳ��{�F����pС����ʧ������@�늙C�����r�����ӭh��Ҫ���^�ߵĄ��ȡ����⣬�Ɍ��y�Y����֪�����d���ӕr�g��5 ms���ң���ؓ�d���ӕr�g�s��10 ms�����y���������ӵĵ�һ�������A�Μ����ڷ����������e����ؓ�d��r�£�����r�g�s��l��2 ms����a����ԭ����Ҫ�Ǻ����˳���늄әC���˲�g���ӭh�в��Ľ����^�̣������了�����A�S푑����ڿ��d��r�£�ֻ�Ю��в�������ӣ�ʹ��ݔ�����ص��ڻ����늙C������Ħ�����������ؕr��늙C�D�Ӳ��_ʼ���D����һ��ؓ�d����r�£���Ҫ���L�ĕr�gʹݔ���������Կ˷�Ħ���������ؓ�d���أ�ͬ�ӣ�ͨ늺��ӭh�в��Ľ����^��Ҳ�����L��
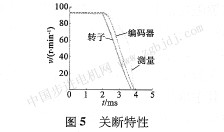
�D5��늙C�P���r�������{�����P���r�g�^����С���s��1��6 ms���P��������������Y������һ�l�����½���ֱ���������y�Y�����ٶȽ��ƞ�ָ����ʽ�½������J���Ѓɷ���ԭ������һ�����ڏ����S�h��ʹ��늾��a����푑��������D�ӵ�푑��������P����䶨�ӭh���в��������Ҫ�ׂ����ڲ�����ȫֹͣ��ӵġ�
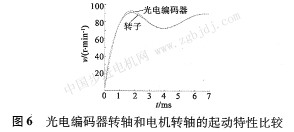
�D6���늾��a���D�S��늙C�D�S���������Եķ���Y�����^���ĈD�п�������ؿ�������늾�
�D6��늾��a���D�S��늙C�D�S���������Ա��^�a�����D�������c늙C�D���D�������@�Ĝ���ͬ�r�䳬�{��Ҳ�����D���D�١���ʽ(7)�ã�
�ɴ˿�Ҋ��ֻ�Ю���늾��a�����D�ӑT����С�r���D�ٲ��1-��2��O�����˕r�ɹ�늾��a���õ����D�٦�2����ҕ���D�ӵČ��H�D�٦�1�����Գ���늄әC��˲�B���Ԝyԇ�r�xȡ�Ĺ�늾��a�����H�ֱ���Ҫ�ߣ����D�ӑT����Ҫ�M��С��
3�YՓ
����늄әC˲�B���Ԝyԇͨ��ʹ�ù�늾��a���M�Мy�٣���˲�B�^�̵����Wģ�������돗���S�h���Ķ����ɶ�ģ�ͣ��ܺõؽ��r���y��˲�B�^�����D�ٵ���ʎ�ͳ���ȬF��ͬ�r��ҲŪ���˶��D�ӽ��|���Ħ��������Ӱ�˲�B푑��ٶȵ�����늙C�D�S�ϵ�Ħ�������ǿ��Ժ��Եģ��M���C���˱��ĵ�˲�B�^�����Wģ�͵Ĝʴ_�Ժ���Ч�ԡ�
ͬ�r���������������͜yԇ�{���ı��^���l�F��ؓ�d�r�������Ǵ�ؓ�d���ӵ���r�£����ӱ����в������ĕr�g�����^�L����늙C�������^���Ӱ푣����ӕr�g��һ�������t��
���⣬����늄әC���ڿ�푑�����˲�B푑��yԇϵ�yҪ���늾��a������С�T���ԜpС�y���`�ͬ�r���yԇϵ�y���S�h���Ą���ҲҪ�M����ҲҪ��늙C�D���S���֣��Ա��C�䄂�ȡ�
|