| ��������ͬ��늄әCʸ������ϵ�y�����c����
�w�d�������F�ܣ����
(�����I���I��W�������������I150001)
ժҪ������������ͬ��늄әC�������oֹ����ϵ�µĔ��Wģ�ͣ����ڿ��gʸ������ķ�������������������ͬ��늄әC�ڃ���ͬ�����D����ϵ�µĔ��Wģ�͡���Matlab��Simulink�h����������������ͬ��늄әCʸ������ϵ�y����ģ�͡�����Y����C���������Wģ�ͺͷ���ģ�K�����_�ԣ��C������������ͬ��늄әCʸ������ϵ�y���ЄӑB푑��졢���B���ȸߡ��D���}��С�ȃ��c��
0 �� ��
�c���y��������ͬ��늄әC(���º��QPMsM)��ȣ�����PMsM���кܶ�ͻ���ă��c�������ˌ���������������Ҫ�����ڌ��F�͉������{�٣������������࣬�\�пɿ��Ըߣ�������Ч�����ńӄ�5��7�εȸߴ��C�����D���}��С��Ŀǰ������PMsM���о��в����죬�����˶���PMSm�đ��á�����PMsM�Ķ����@�M�Ƀ��������@�M�M�ɣ�����PMsM�кܶ�������Փ�ͽ�����ֱ�ӑ���������늙C�ϡ��������������늄әC������PMSM���đ��ñ��^�V����
���Ľ���������PMsM�Ĕ��Wģ�ͣ��ڴ˻��A�Ͻ���������PMsMʸ������ϵ�y��ģ�ͣ�������Matlah��Simulink�M�з�����C������Y����C������ģ�͵����_�ԣ��C��������PMsMʸ������ϵ�y���Ѓ�Խ�ĄӑB�ͷ��B���ܣ����Mһ���о�����PMsMʸ������ϵ�y�춨�˻��A��
1����PMSM���Wģ��
1��1�����oֹ����ϵ��늙C���Wģ��
����PMsM�Ķ����@�M�Ƀ��������@�M�M�ɣ���Dl��ʾ����һ���@�Mӛ��ABc���ڶ����@�Mӛ��XYZ��ÿ�������@�M�и����@�M�S���ڿՆ������120o�����������@�M������֮�g�ĊA�Ǟ�30o�����˱��ڷ��������O����PMsM������늙C��������늄әC�T���xȡ����ϵ��������
�������l���£�����PMsM�������oֹ����ϵ�µ�늴��Pϵ��������ʽ��
(1) ����늉�����
ʽ�У�US�鶨��늉�������US=[UA UB UC UX UY UZ ]T;is�鶨�����������is=[ia ib ic ix iy iz ]t; ��s�鶨�Ӵ����������s=[��A ��B ��C ��X ��Y ��Z ]T��RS�鶨���@�M�ꎾ�ꇣ�RS=RI6��6,RS�鶨����裬I6��6���λ��ꇡ�
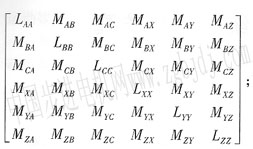
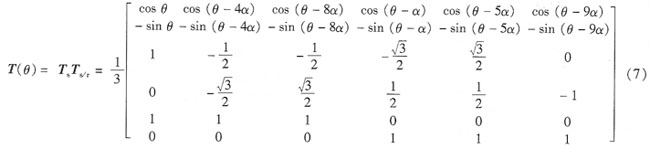
��2�����Ӵ�朷���
ʽ�У�LS�鶨��늸о�ꇣ�LS=
朷�ֵ��F(��)���D�Ӵ���ڶ��������õı���ϵ����ꇣ�F(��)=[cos �� cos(��һ120o)cos(��-240o)cos(��-30o)cos(�ȡ�150o)cos(��270o)]T���Ȟ��D���S���c����A���@�M�S���ĊA��(늽Ƕ�).
����PMSM�Ķ���늸о�ꇰ��������ԸкͶ���ͬ���С�����ƪ�����ڴ˲���Ԕ����B���H�г���Y��.
(3)늴��D�ط���
�����Ź���ԭ��������PMSM�D�ط��̿ɱ�ʾ�飺
ʽ�У�T��늴��D��;P���D�ӘO������Wf��Ź���.
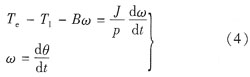
(4)�D���\�ӷ���
ʽ�У�T��ؓ�d�D�أ�B������ϵ�����؞��D��늽��ٶȣ�J���D�ӑT����
�����Ϸ������Կ��������ھS�������ӣ�������늸о�ꇾS�������ӣ����������늙C���Wģ�͵ď��s�̶ȣ��@�o����늙C�Ŀ��Ǝ����˺ܴ�����y����ˣ���횲�ȡ���m������׃�Q���Ժ���늙Cģ�͡�
1��2����׃�Q
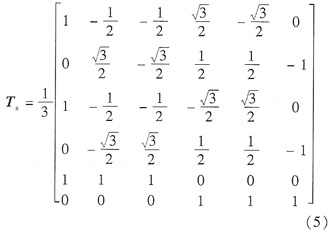
Y��zhao���о�����Б�늙C�r���ľ��׃�Q�ĽǶ�����˿��gʸ������ķ���������PMSM���Կ���һ���˜ʻ��µ����Sϵ�y�������C��ԓ���Sϵ�y���������ֱ��3���ӿ��g��ʾ������µĿ��g�ą�������ϵ������oֹ����ϵ���t׃�Q��ꇞ飻
����еĵ�һ�����Ќ�����-���ӿ��g�����������Ќ���z1-z2�ӿ��g�����塢���Ќ���o1-o2�ӿ��g�����@�����ӿ��g�У�ֻ�Ц�-���ӿ��g�c�����D�Q���P������������ϵ��ͬ�����D����ϵ�r��ֻ�茦�����ӿ��g�M��׃�Q��ͬ�����D׃�Q��ꇞ飺
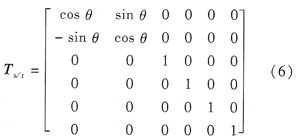
���ԣ������oֹ����ֱ��׃�Q��ͬ�����b����ϵ�r��׃�Q��ꇞ飺
ʽ�У���=30o��
1 3�������D����ϵ��늙C���Wģ��
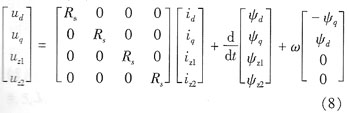
�������D�Q��o1-o2�ӿ��g�ķ������㣬����PIVISM�Ĕ��Wģ��׃��������ʽ��
늉����̣�
��朷��̣�
�D�ط��̣�
�ڃ������D����ϵ�£�����PMSM���\�ӷ��̲�׃����ʽ(4)��ͬ��
ͬ�����oֹ����ϵ��ȣ�����PMSM�ڃ������D����ϵ�µĔ��Wģ�͵õ����^��ĺ������ַ��̵ăr�������ˣ�ֱ�S��朦ͽ��S��朦ײ������D��늽ǶȦȵĺ������@������PMSM��ʸ�������ṩ�˻��A��
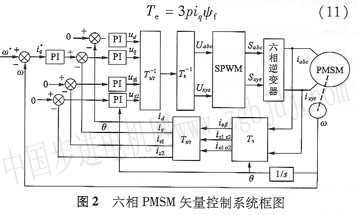
2���ࣺPMSMʸ������ϵ�y
�D2������PMSlVIʸ������ϵ�y��D.���Ϲ��У��҂��õ��˃���ͬ�����D����ϵ�µ�����PMSM늴��D�ط���ʽ(10)������������ֱ�S����id=O���tʽ(10)׃�飺
��ʽ(11)�У��D�Ӵ�朦��D�ӘO����p�鳣����늴��D��ֻ�c������S����i���P���ҳ��������Pϵ������������S����i����ɿ���늴��D�أ��Ķ����F�˽�����ơ��������i��i�c늙C�����D�Q�o�P���������Ĵ��ڕ����Ӷ���������C�����Ķ��������~�p��������ϵ�y��Ч�ʣ��ڿ����Б�������ԓ�ӿ��g�е�������㡣�@��������PMsM��ʸ������ԭ����
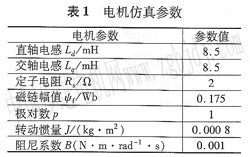
3����Y��������
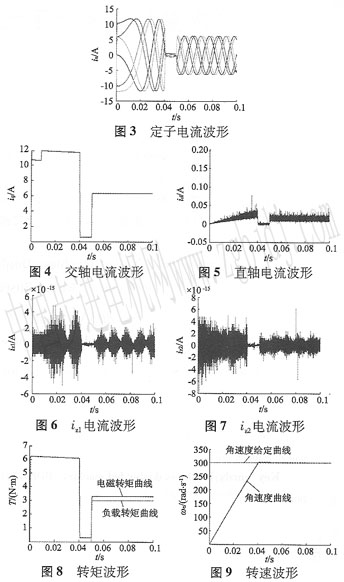
PMSM���慢�����1��ʾ��늙C���d���ӣ�
��O��05 s�rͻ��5 N��m��ؓ�d�����沨����D3���D9��ʾ��
�ĈD�п��Կ������������^���У��D�ٺ��������ֱͬ��늄әC�p�]�hϵ�y���ơ���һ�A��(O��O��04 s)����������A�Σ��ٶ��{����ͣ��D�٭h�ஔ���_�h�����S���������****ֵ��늴��D��Ҳ������****ֵ��늙C�D�پ������L���ڶ��A��(O. 04��0. 05 s)���D���{���A�Σ��D���_���~���D�٣��D���{������ͣ����S��������s����(늙C���d����)��늙C���B�\�Еr��������������Ҳ���ÿ���@�M�и��@�M������120 o�����������@�M���������֮�g�ĊA�Ǟ�30o��z1-z2�ӿ��g����dz�С���f������늙C����ʸ�����g�����ʸ�����Ʒ����܉���Ч�������C�������͓p�ģ�����PMSM�ĄӑB푑��죬���B���ȸߣ��D���}��С���C��������PMSMʸ������ϵ�y�ă�Խ�ԡ�
4�Y�Z
����ͨ�^ʸ�����g����ķ�������������PMsM��ͬ�����D����ϵ�µĔ��Wģ�ͺ�����sP��wM��׃���Ĕ��Wģ�ͣ��ڴ˻��A�Ͻ���������PMSMʸ������ϵ�y��ģ�ͣ�������Matlah��simulink�M�з������������Y����C������ģ�͵����_�ԣ��C�������OӋ�Ļ���ʸ�����g���������PMSMʸ������ϵ�y���Ѓ�Խ�ĄӑB�ͷ��B����.ԓ����ģ�͞�����PMSMʸ������ϵ�y���о����OӋ�ṩ����Ч�ķ��������������Mһ���о�����늙C����ϵ�y����һ����ָ�����x�� |