| �pͨ�����O���D(zhu��n)׃����һ��(sh��)���D(zhu��n)�Q�����O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n)
����֣������J�����������S�c��
(1�|�ϴ�W(xu��)�����K�Ͼ�210096��2���K�Ԅ�(d��ng)���о��������K�B�Ƹ�222006)
ժҪ���������pͨ�����O�D(zhu��n)׃����һ��(sh��)���D(zhu��n)�Q���ĽM�ɼ�ԭ������(y��ng)�Ô�(sh��)�ֻ��^�ɘӼ��g(sh��)���]�h(hu��n)��ۙ�����㷨���M�ϼm�e(cu��)�㷨���O(sh��)Ӌ(j��)��(sh��)�F(xi��n)��һ�Nȫ��(sh��)�����pͨ�����ORDc�D(zhu��n)�Q�����D(zhu��n)�Q���ȸߡ��Y(ji��)��(g��u)���Ρ��ɱ��͡�
0�� ��
�pͨ�����O���D(zhu��n)׃����һ��(sh��)���D(zhu��n)�Q��(���º��Q�pͨ�����ORDc)����һ�N�߾��ȡ��߿ɿ��Ե��S�ǜy���x�������Мy�����ȸߡ��Y(ji��)��(g��u)���Ρ��\(y��n)�пɿ������c(di��n)����Ҫ��(y��ng)���ڸ߾��ȡ��߿ɿ��ԵĿ��Ɯy���I(l��ng)���T�纽�졢���ա��C(j��)���˿��ơ����͔�(sh��)�ؙC(j��)���ȡ�
�pͨ�����O���D(zhu��n)׃����һ��(sh��)���D(zhu��n)�Qϵ�y(t��ng)һ���ɜy��Ԫ���ͽ����·�ɲ��ֽM�ɡ��y��Ԫ�������pͨ�����O���D(zhu��n)׃�������������·�Č�(sh��)�F(xi��n)��ʽĿǰ��Ҫ���������N��
(1)����Ԫ����ļ�Ӳ����(sh��)�F(xi��n)�·���Y(ji��)��(g��u)��(f��)�s���w�e��
(2)����RDcоƬ�ӽM���·���ɱ���(�fԪ)��
(3)A��D�D(zhu��n)�Q��ܛ�����Ƿ�������㡢�M�ϣ����ȵ͡����IJ���һ�N�pͨ�����ORDc��ȫ��(sh��)��ʽ��(sh��)�F(xi��n)�������^�ٵ�����·Ԫ�������̖�{(di��o)�������������ܲ���ȫ����DsP���Ô�(sh��)��̎����ʽ��(sh��)�F(xi��n)�����гɱ���(ǧԪ)�����ȸߡ��ɔU(ku��)չ�Ժõȃ�(y��u)�c(di��n)��
1��(g��u)���c����ԭ��
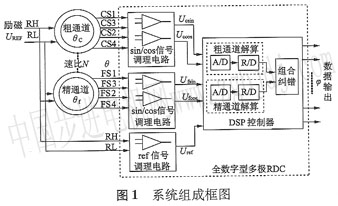
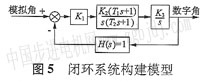
�pͨ�����O���D(zhu��n)׃����һ��(sh��)���D(zhu��n)�Qϵ�y(t��ng)�Ŀ��w�����nj�(sh��)�F(xi��n)늚�ģ�M�ǶȦȵ���(sh��)�ֽǶȦյ��D(zhu��n)�Q��ϵ�y(t��ng)�M�ɿ�D��D1��ʾ����Ҫ���pͨ�����O���D(zhu��n)׃�������{(di��o)���·��DsP�������M�ɡ������ԭ���ǣ��pͨ�����O���D(zhu��n)׃�����Ĵ־���·��̖��(j��ng)�^��̖�{(di��o)���·�D(zhu��n)�Q������������̖������DsP����������·��ͨ��ģ�M��̖�M(j��n)��ͬ��A��D�ɘӣ�Ȼ�����ܛ��R��D�㷨�քe������־���·�Ĕ�(sh��)�ֽǶ�ֵ����־��Ƕ�ֵ�M(j��n)�нM�ϡ��m�e(cu��)����ݔ�����ж��M(j��n)�Ɣ�(sh��)������
2�O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n)
2��1�O(sh��)Ӌ(j��)
�pͨ�����ORDcϵ�y(t��ng)�Y(ji��)��(g��u)���Σ���Ҫ���{(di��o)���·��DsP�M�ɡ�
(1)�{(di��o)���·
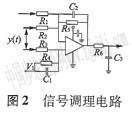
���D(zhu��n)׃����ݔ����̖�轛(j��ng)�{(di��o)���·�ı����Ŵ��ƽ���ơ��V����ʹģ�Mݔ��M��A��D�D(zhu��n)�Q�Ą�(d��ng)�B(t��i)������ͬ�r(sh��)�B�������Dz���̖������̖�{(di��o)���·��D2��ʾ������R��c�M��Rc���l�V�������c���\(y��n)����(w��n)�����ã��������l��̖�M(j��n)�ОV����
(2)DsP������
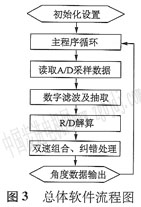
ϵ�y(t��ng)�еĴֹ���ȫ����DsP��ɣ�����DsPܛ��������Ҫ��(sh��)�F(xi��n)A��D�D(zhu��n)�Q��R��D�ǶȽ��㣬�ǶȔ�(sh��)��(j��)�p�ٽM�ϡ��m�e(cu��)̎���͔�(sh��)��(j��)ݔ�����ܣ��係�wܛ�����̈D��D3��ʾ��
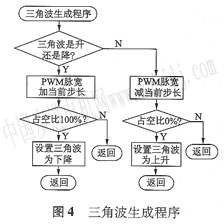
�������Dz��������£�����PwM�}���{(di��o)��ݔ������ģ�M�e���������ɣ����w������D4��ʾ��
2��2��(sh��)�F(xi��n)����
2. 2. 1 R��D�����㷨
���õ�R��D�����㷨��Ҫ�����Ƿ��ͽǶȸ�ۙ�z�y�������Ƿ���ͨ�^������������̖�ķ����к���(sh��)ֵ����ͨ�^�������Д����ԓ�Ƕ�ֵ�����ڷ����к���(sh��)ֵ����ͨ�^�����(sh��)�ƽ���������ã����`���^���Ƕȸ�ۙ�z�y�������ö��API�������Ļ����]�h(hu��n)��������`��ֵ���pС��ۙ�`�ʹģ�M�ǶȺ͔�(sh��)�ֽǶ����҂�Ҫ��ľ��ȷ�����(n��i)��ȣ��Ķ���(sh��)�F(xi��n)��ģ�M�Ƕȵ���(sh��)�ֽǶȵ��D(zhu��n)�Q���������m��(y��ng)�����㾫�ȸߵȃ�(y��u)�c(di��n)��
ͬ�r(sh��)����(j��)��(sh��)�H��(y��ng)�������pͨ�����ORDc�D(zhu��n)�Qϵ�y(t��ng)����ݔ���߾����⣬߀��߂䣺1)���н�λ���ٶ���ݔ����2)ϵ�y(t��ng)���ٶ��`���O������ۙݔ��ǦȄ����D(zhu��n)��(d��ng)�r(sh��)���ս����ܱ��C****��Чλ���D(zhu��n)�Q���ȡ��C�ϣ��]�h(hu��n)ϵ�y(t��ng)ģ�͘�(g��u)����D5��ʾ��R��D�����㷨���ýǶȸ�ۙ�z�y��������ϵ�y(t��ng)�����AII��ϵ�y(t��ng)����ݔ����A�S��̖�������D(zhu��n)��(d��ng)��̖�r(sh��)��(w��n)�B(t��i)�`����㡣
2. 2. 2 A��D�������
�߾��ȵĽǶȽ��㣬��Ҫ�߾��ȵ�A��D�D(zhu��n)�Q���䌍(sh��)�F(xi��n)������Ҫ�У�һ����Ӹ߷ֱ��ʵ�ADcоƬ����������DsP��(n��i)��A��Dģ�K��ͨ�^ܛ�����������^�ɘӼ��g(sh��)��pС�����`�������D(zhu��n)�Q���ȡ��߷ֱ��ʵ�ADcоƬ�r(ji��)���F���ڲ�����Ӳ�����g�ͳɱ���ǰ���£�ϵ�y(t��ng)����DsPоƬ�Ԏ���A��Dģ�K�Y(ji��)���^�ɘӼ��g(sh��)��ͬ�����_(d��)���^�߷ֱ��ʡ�
�^�ɘӼ��g(sh��)�Ǹ���(j��)��̖̎��ԭ��������Ա�ݔ����̖���l�ߺܶ�IJɘ��l�ʲɘӣ����o���m��(d��ng)?sh��)Ĕ?sh��)�֞V�����������_(d��)����ԭA��D�D(zhu��n)�Q�����ߵIJɘӾ��ȡ�����(j��)��(sh��)�F(xi��n)��ʽ�IJ�ͬ�֞�B�����Dz����g(sh��)�ͯB�Ӱ������g(sh��)��
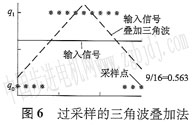
�B�����Dz����g(sh��)��D6��ʾ�����O(sh��)ݔ����̖λ��������q�cq֮�g��A/D�D(zhu��n)�Q�����õ������е�ijһ��(g��)ֵ��ͨ�^�����m��(d��ng)?sh��)����Dz����t����(hu��)��ijЩ�c(di��n)��q����һЩ�c(di��n)��q�������߳��F(xi��n)�ı���������ݔ����̖��q��q֮�g���^�_��λ�á�
���ڲɘ��l�ʺܸߣ�ݔ����̖������׃�������J(r��n)���С���D6�б�ʾݔ����̖�s��(q+O��6)�r(sh��)����ͨ���D(zhu��n)�Q�����ɘ�������q�����B�����Dz���ɘӵ�һϵ�е�q��q�����߳��F(xi��n)�ı��������ˌ�(sh��)�H��ݔ����̖λ�á��D6���^�ɘ��ʞ�16������ֵ��q���F(xi��n)9�Σ�q���F(xi��n)7�Σ��ɴ˵õ�ݔ����̖��(q+O��563)����Ҋ��ԭ����q�����`��С�öࡣ
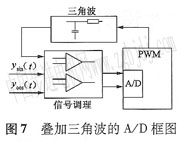
����DsPоƬ��PwM��Ԫݔ��ռ�ձ���O��********֮�g׃����PwM������������ݽM�ɵķe���·��ռ�ձ�׃����PwM��׃�Q��0��5 v֮��׃�������Dz�����ͨ�^��̖�{(di��o)���·�B����ݔ����̖����D7��ʾ�������DsP��ɸ��ٲɘӡ���(sh��)�ֵ�ͨ�V���ͳ�ȡ���_(d��)�����A��D�D(zhu��n)�Q�ķֱ��ʣ�
2��2��3�M�ϡ��m�e(cu��)
���pͨ�����O���D(zhu��n)׃�����֡����ٱȞ�1��N����ͨ����(zh��)��Oo����360o�Ĵ֜y������ͨ����(zh��)��360o����������(n��i)�ľ��y��(N���ٱ�)������ͨ���D(zhu��n)��(d��ng)1Ȧ����ͨ�����D(zhu��n)��(d��ng)nȦ��
�־��M�Ϻ�ĽǶ�λ��(sh��)���ɴ�ͨ���Ƕ�λ��(sh��)���Ͼ�ͨ���Ƕ�λ��(sh��)�M�ɡ�һ����f����ͨ���Ƕȵ�λ��(sh��)����(sh��)�Hλ��(sh��)ȡ������ͨ���Ƕ�λ��(sh��)�t��횸���(j��)�ٱȁ�ȡ����ͨ���Ƕ�λ��(sh��)n�c�ٱȢ����P(gu��n)ϵ���£�
2n��N
n=INT[1Og2N]
����������ȡ����(sh��)���õ���ͨ���Ƕȵ�λ��(sh��)��
�ڴ־��M���У����ڴ־��C(j��)е�S֮�g�X݆�g϶�a(ch��n)������(d��ng)�`��ɂ�(g��)���D(zhu��n)׃�������b��ͬ�ĵȹ�ˇ����Ӱ푺�늚���λ�`��Լ�R��D�D(zhu��n)�Q�^�̱������D(zhu��n)�Q�`�ʹ�ô־��x��(sh��)�M�ϕr(sh��)������ģ���^(q��)�g��ԓ�^(q��)�g�l(f��)���ڴ�ͨ���x��(sh��)�ڃɂ�(g��)��(sh��)�a��߅���B(t��i)�r(sh��)�����x��(sh��)�ࡰl(f��)�������١�l(f��)�����@�N�`����ԭ�����`����ϵ�y(t��ng)�и���(g��)Ԫ�������·�ľ��ȣ�ֻ�ܜp���@�N���e(cu��)���F(xi��n)�Ď��ʣ�������****���⣬����־��M��ǰ����M(j��n)���Д�m�e(cu��)���m�e(cu��)��ԭ�t���Ծ�ͨ���ǶȽǼm����ͨ���Ƕȡ�
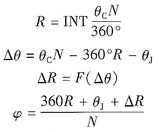
���Ȍ���ͨ���Ƕȳ����ٱ�N��ʹ�ô�ͨ���Ƕ��Ծ�ͨ�������(zh��n)���R������360Oȡ������(sh��)���֣�����������(sh��)�c��ͨ���M(j��n)�б��^�m�e(cu��)���_������(sh��)�����Ǽӡ�l(f��)����p��l(f��)�����ߡ���׃�����m�e(cu��)�������(sh��)���ּ��Ͼ��ǣ��ٳ��Ԣ����������(g��)�m�e(cu��)�M���^�̡��㷨���£�
ʽ�У��Ȟ���S�ǣ��Ȟ龫�S�ǣ������ٱȣ�R�������(sh��)���֣�������Ȧ��(sh��)��INT��ʾȡ���\(y��n)�㣻���Ȟ�Ŀ��С��(sh��)�����c�ȵIJ�ǣ������`���R����Ȧ��(sh��)����ֵ��F��ʾ����(j��)�����M(j��n)�еļm�e(cu��)̎�����՞�־��M�Ϻ�ĸ߾����S������
3�Y(ji��)������
3 1�o�B(t��i)�Ǿ���
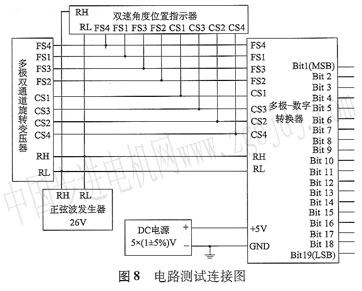
�yԇ�·�B����D8��ʾ�����Ȝyԇ�Č���Դ�����pͨ���Ƕ�λ��ָʾ��(�pͨ���yԇ���Ȟ�0.001 5O)���pͨ�����O��׃�����ą���늉���26v�������l�ʞ�400 Hz����̖늉���11. 8 V���ٱȞ�1��32���pͨ�����ORDc�D(zhu��n)�Q���־�ͨ���Ƕ��D(zhu��n)�Qͬ��12 bit��ȡ��ͨ��7 bit(����λ����m�e(cu��)λ)����ͨ��12 bit���M�ϽǶ�ݔ����17 bit�IJ��ж��M(j��n)�Ɣ�(sh��)�ִa��
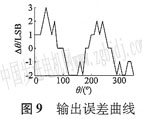
��OO����360O��10O���g�Ƚ���ݔ���Ƕ��c�pͨ���Ƕ�λ��ָʾ����(bi��o)��(zh��n)�Ƕȵ�17 bit���M(j��n)�Ʊ�ʾ��(sh��)֮�ݔ���Ƕ��`����D9��ʾ���ɈD9��Ҋ��ԓ�pͨ�����ORDc�D(zhu��n)�Q����ݔ���Ƕ��`��****��3LsB��1LsB=360O��2=O. 002 7O�������Ȟ��O��008O��
3��2��(d��ng)�B(t��i)����
ݔ����̖���ó��õ��\(y��n)��(d��ng)ģʽ���������\(y��n)��(d��ng)�������\(y��n)��(d��ng)��
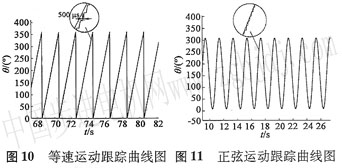
�D10������\(y��n)��(d��ng)��ۙ�����D�����й⻬ֱ����l(f��)����̖���A�ݲ����ۙ�����������^�y����ۙ�����c�l(f��)����̖�����غϡ��ɈDlO�ľֲ��Ŵ�D��Ҋ���Ƕ�ݔ�����t��500��s���������õČ�(sh��)�r(sh��)�ԡ�
��Ҫ�f�����ǣ����ڲ��Ô�(sh��)��ʽ���㣬��������ڼ��Ƕ�ݔ�����ڞ�1��25 ms���D10���Dllܛ������IJɘ��l�ʞ�400��s����ˣ����nj�ݔ���ǶȲɘӃɴλ�������ͬ��ֵ�����F(xi��n)���ۙ�����@ʾ���A�ݠ�Ρ�
�D11�������\(y��n)��(d��ng)��ۙ�������������ڞ�2 s����ֵ��150o����ۙ����ƽ�����oʧ�棬���ٶ��`��С��
4�Y(ji��)�Z
���ķ������pͨ�����ORDc�D(zhu��n)�Q����ϵ�y(t��ng)�M�ɼ�����ԭ������(y��ng)�Ô�(sh��)�ֻ��^�ɘӼ��g(sh��)���]�h(hu��n)��ۙ�����㷨���M�ϼm�e(cu��)�㷨��������һ�Nȫ��(sh��)�����pͨ�����O���D(zhu��n)׃������(sh��)���D(zhu��n)�Q��������^����ͬa(ch��n)Ʒ���fԪ�ăr(ji��)���������нY(ji��)��(g��u)���Ρ��ɱ��͡��U(ku��)չ�Ժõȃ�(y��u)�c(di��n)����(j��ng)�^��(sh��)�H�yԇ�C����ԓRDc�D(zhu��n)�Q��ͬ�Ӿ��и߾��ȡ���(d��ng)�B(t��i)���ܺã��ڸ߾��ȡ��߿ɿ��ԵĿ��Ɯy���I(l��ng)����кܺõđ�(y��ng)��ǰ����
|