�z��������ģ������PID��������SRM�еđ���
�̾S��
(�����ЏV���ҕ��W�����K����213001)
ժҪ��ᘌ��_�P����늙C��ϵ�y�ć��طǾ��ԡ��r׃�͏�����ԣ��������߷����C����ģ��������Փ���ڂ��yPID���������A���OӋһ�Nģ������PID������������������z���㷨��PID�����������M�Ѓ����OӋ����������Y�������������z��������ģ������PID�������������õ��{�ٺͿ������ԣ�������������@���ڂ��yPID���ƺ�ģ������HD���ơ�
�P�I�~���_�P����늙C���z���㷨��ģ������PID������
�ЈD���̖��TM352 �īI���R�a��A ���¾�̖��1004��7018(2008)01��0008��03
0����
�_�P����늄әC(���QSRM)�{��ϵ�y���S�������Ӽ��g����X���g�Ϳ��Ƽ��g�lչ��������һ�������o���{��ϵ�y�����@�����c��늙C�Y�����Ρ��{�ٷ����V�������D�ش��{�ٺͿ������ܺá�Ч�ʸߡ�SRM�ڵ͉���С���ʵđ��È��ϣ��������ͨ�Į���늄әC��ֱ��늄әC��Ŀǰ�������ˇ�����W�ߵ��ձ��Pע�������о������ںܶ��I��õ��ˏV���đ��á���SRM��·�ĸ߶ȷǾ��ԛQ��������һ���r׃�ġ��Ǿ���ϵ�y�����y����侫�_�Ĕ��Wģ�ͣ����ԑ��Â��y�ľ��Կ��Ʒ���(��PID����)�y�ԝM��ӑB�^���SRM�Ǿ��ԡ�׃�Y����׃������Ҫ����ʹSRMϵ�yȡ�Ã������{�����ܺͿ���Ʒ�|�����Č��z���㷨��ģ�����ƺ����߷����C���c���y��PID������Y�ϣ��OӋ��һ�Nģ���������m��PID�������������z���㷨����������������������������SRM�{��ϵ�y�У�����MAT��LAB�M�з��挍�����Ч�����@���ڂ��yPID��������ģ������HD�����������к��������Ժ����m��������
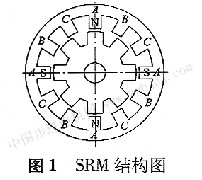
1 SRM����ԭ��
�D1��SRM�ĽY��ʾ��D,�����D�Ӟ��p�O�Y��������������D�ӵ�����λ��������ʼλ�ã���������B���@�Mͨ늕r���͕��a��һ��ʹ�����D���cԓB���@�M�S���غϵ�늴��D�أ��D�ӱ�������������rᘷ����B�m���D�������νoC���@�Mͨ늣��t�D�ӌ�형r����D����ˣ�SRM���D��ȡ�Q�����@�Mͨ늴����c���@�M���������o�P��
����SRM�Ǹ߶șC�һ�w���ğo���{��ϵ�y������늚ⲿ�֡��Cе���ֺ͙C�ϵ���֣��䔵�Wģ�������飺
ʽ�У�Uk��Rk��ik����k�քe���k���@�M��늉�����衢����ʹ�朡�
(2)�D�ط���
ʽ�У�Wk��Tk�քe��늙C��k��Ĵň����ܺͮa����늴��D�أ��Ȟ��D��λ�ýǣ�Ttotal�鿂��늴��D��(�������D��֮��)��
(3)�Cе�\�ӷ���
ʽ�У�J��ϵ�y�D�ӑT����B��Ħ��ϵ����TL��ؓ�d�D�ء�
�������Wģ���У�����SRN���ڇ��ص��Ч����߅��Ч���ͷǾ��ԣ���֮�\�Еr���_�P�Ժ��ܿ��ԣ��o���������^���_�Ĕ��W�Pϵ��������y�ľ��Կ��Ʒ������y�ԝM��SRM�Ǿ��ԡ�׃������Ҫ����ȡ������Ŀ���Ч����
2 SRM��ϵ�y�OӋ
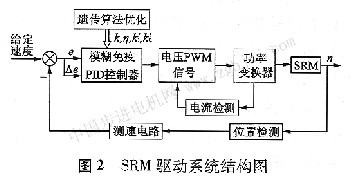
SRM�{��ϵ�y��Ҫ��SRM������׃�Q������������λ�Ùz�y���Ȳ��ֽM�ɣ���������ϵ�y���ИУ��������ٶ�ָ��ٶȷ�����̖�������������λ�Â���������Ϣ���������M�оC�Ϸ���̎�����l��������̖�����F��SRM�\�Р�B����Ч���ơ����Ŀ����������z���㷨������ģ������PID��������ϵ�y�Y���D��D2��ʾ��
2.1����PID����ԭ��
����PID�������ǽ��b����ϵ�y�����ߙC�����OӋ��һ�N�Ǿ��Կ��������������߷����C�������x��A���Ŀ�ԭ�������(k)���ɿ�ԭ�̼��ā�������T����THݔ����TH(k)��
ʽ�У�k1�鼤�����ӡ����OTs���Ƽ�����B������Ӱ푞�Ts(k)���t��
ʽ�У�k2���������ӣ�f(��)��Ǿ��Ժ�������ӳ���Ƽ���Ts�������������B�������յĿ��̼��飺
�������ϵ�y��k���ɘӕr�̽o��ֵ�cݔ��ֵ��ƫ��e(k)�Ϳ�������ݔ��u(k)�քe����������ϵ�y��k���Ŀ�ԭ������(k)��B�������յĿ��̼�s(k)���t�����µķ�������Ҏ�ɣ�����
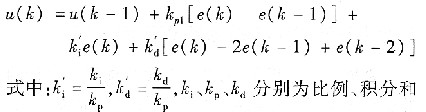
ʽ�У�K����Ƶ�푑��ٶȣ�K=k 1��KԽ��푑��ٶ�Խ�죻�Ǟ����푑��ķ����ԣ�  ������ϵ�y�ij��{���͜pС��ֻҪ�m���{������k�ͦǣ���ʹ����ϵ�y�@ȡ�^���푑��ٶȺ��^С�ij��{�� �ɴ˿�Ҋ���������߷����C���Ŀ��������H����һ���Ǿ���P��������ԓ����������һ��������P�����߷�����������һ������ģ�K�M�ɣ������ϵ��Kp1�S��������ݔ����׃����׃�������к������m������������PID��������ݔ��u(k)�飺
��ϵ����
2��2ģ������P1D���������OӋ
����K��w�ͷǾ��Ժ���f(��)���xȡ���������������кܴ��Ӱ푡������\��ģ�����������ƽ��Ǿ��Ժ���fu(k)����u(k))��������PID��������ݔ��u(k)����׃������u(k)����ԓģ����������ݔ��׃����ݔ��׃����Ts��������������f(u(k)����u(k))��
ݔ��׃��u(k)����u(k)�cݔ��׃��f(u(k)����u(k))��Փ��ȡֵ����7���Z��ֵ����NB(ؓ
��)��NM(ؓ��)��NS(ؓС)��zE(��)��PS(��С)��PM(����)��PB(����)�����]SRM�D��ƫ������߷��پ��ȵ����c��Ҫ��ƫ��u(k)Փ��綨��19���ȼ���ƫ��׃������u(k)��ݔ����������f(u(k)����u(k))�綨��11���ȼ�������
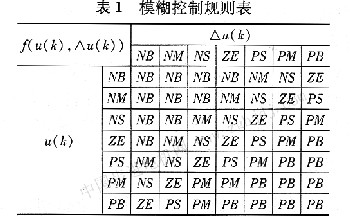
����sRM�\�����ԺͲ���������ģ������Ҏ�t���l��ʾ��
ģ������Ҏ�t���Բ�������һ�Mģ���l���Z��������� If u is Ai ��uisBjtherf��=cij(����i=l��2...m��j=1��2������n)
�O����k�lҎ�t����˵õ���
�@Щģ���l���Z��ɚw�{��һ������ģ���Pϵ�飺
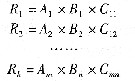
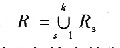
����ģ�������ϳ�Ҏ�t��ݔ����������ģ������Cij��(Ai��Bj).R��
3�z���㷨����ģ������PID������
�������������֪���������߷����C���OӋ�����߿��������H�Ͼ���һ���Ǿ���P�����������ڴ������Ǿ��Ըɔ_���������أ��ڴ_������k1���ǡ�ki��kd��ȡֵ�r���^���y��Ŀǰ�������������ܶ࣬���īI[1]����Ćμ��η��������������ȣ��mȻ�@Щ�������������õČ������ܣ��������Դ������@�IJ��㣬��μ��η��O��������ֲ�****�⣬�����������ĕr�L���ٶ���������Ч������z���㷨��һ�N������Ȼ�x���Ⱥ�w�z���C���IJ����S�C�����㷨����ģ�M����Ȼ�x�����Ȼ�z���^���еķ�ֳ���s����׃���F����������Ҫ�κ���Ϣ���H�����m���Ⱥ���ֵ��ͨ�^�z���M�����ܵõ�ȫ��****�⡣�����z���㷨�������߿������IJ��E���£�
(1)�������a���_��ÿ�������Ĵ��·����;��a�L�ȡ����в��Ì������a�������߿�������ÿһ������k1���ǡ�ki��kd���邀�w�е�һ�������a�L�ȵ����䂀�w�Ă�����
(2)�a����ʼ�NȺ�������z���㷨�ij�ʼ�NȺ���S�C�a���ģ�������gȱ�������ԡ����Č�������������ȡֵ��������ֳ�Ⱥ�w������С�^�g����ÿ����ʼ���w��ÿ��С�^�g���S�C�xȡ���ľ��д����Ե�ֵ���S�C�M�ϳ��µĻ����®a���ĸ������w�����к��Ĵ����ԣ�����߀���������@�IJ�e�����C��ʼ�NȺ�Ķ����ԣ������������Ք���ȫ��****�c�����ԡ�
(3)�OӋ�m���Ⱥ����������w�������aһһ���������߿������ĸ�������ֵ��Ȼ�������@Щ����ֵ���������w�Ŀ���Ҫ�_��****ָ�˺���J���m���Ⱥ�����
(4)�����x���׃�������M���z���������a����һ���NȺ�������z���㷨�У����ù̶��Ľ�����ʺ�׃�����ʣ�����Ч�ʲ��ߣ��Ҵ�������F�����OӋ�����m��׃���Ľ������Pc��׃������Pm���������Pc��׃������Pm�ܻ��ڂ��w�m�������m�����M���{�������C���z���㷨���Ք���������ʹ���Ք��ٶȼӿ졣���m���������Pc��׃������PmӋ�㹫ʽ�飺
ʽ�У�fmax��ÿһ��Ⱥ�w��****�m���Ⱥ���ֵ��f��ÿ��Ⱥ�w��ƽ���m���Ⱥ���ֵ��f��Ҫ����ăɂ����悀�w���^����m���Ⱥ���ֵ��f��Ҫ׃�����w���m���Ⱥ���ֵ��K1��K2��K4�Ğ鳣��(��1)��
(5)�Y���l���Дࡣ���M��Y����ֹ�l�����t�Y���z���M���^�̣���t���ص�(4)����
4���挍��о�
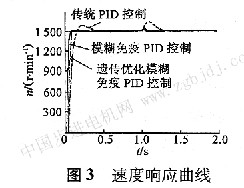
�����Mһ���f������C�z���㷨������ģ�����߿�������SRM��ϵ�y�еđ�����r���ڲ�ͬ�����l���£�����MATLAB�Z���M��Ӌ��C���������SRM���慢���飺����6��4�O���~���������I=5 A���~���D�ٞ�n=l 500 r��min����������R=3��4�����~���D�ӑT����J=0��000 16 kg��m2��ģ������PID�������ą���ֵ��������O���飺K=O��27����=O��08��ki=O��5��kd=0��2���鷽����^��Ҋ�����yPID�����������cģ������PID�������������xȡһ�£���Kp1=K[1-��f(u(k)����u(k))]�͂��yPID��f(��)=0����Kp1=K=0��27�����Ԃ��yPID�����������x���飺kp=0��27��ki=O��5��kd=0��2���z�������飺��ʼ�NȺҎģ��50���������Pc=O��86��׃������Pm=O��02���M�������Δ���100�����^�z���㷨������õ���ģ������PID������������****ֵ��k=0��506 3����=O��062 5��Ki=1��854 2��Kd=O��014 7���D3�еĂ��yPID
���ơ�ģ������PID���ƺ��z������ģ������PID�������N��r�µ��ٶ��A�S푑�����(�o���D��l 500 r��min����t=l. 0 s�r��һ�_����)���ķ���Y�����Կ����������z���㷨�M��ģ������PID���������������OӋ�r���õ��Ŀ���ϵ�y�ķ����Ժã�푑��ٶȿ죬�{���r�g�̣����{��С�������ԺͿ��ɔ_�������������Ч�����@���ڂ��yPID���ƺ�ģ������PID���ơ�
|