����ģ��PID�Ľ���늄әCʸ������ϵ�y
�ܺ�����������������|
(�|�A��W���Ϻ�201620)
ժҪ������늄әCʸ������ϵ�y��һ���Ǿ��ԡ�����ϡ��r׃�ď��sϵ�y���Â��y��PID�y���_������Ŀ���Ч��������ģ������ԭ���c���yPIDԭ����Y���OӋ��ģ��PID������������Y������������ģ��PID�������Ȳ��ó�ҎPID���������и��õĄӷ��B���ܡ�
�P�I�~��ʸ�����ƣ�ģ�����ƣ�PID���ƣ�ģ��PID���ƣ�����늄әC
�ЈD���̖��TM34 �īI���R�a��A ���¾�̖��1004��7018(2010)01��0064��03
 0���� ����늄әC�Y�����Ρ��ɱ��ͣ����b�h��Ҫ��ͣ��m����ȼ���ױ������m�Ĉ��ϣ��������ڴ����������D�ّ����I������A�����ǽ���늄әC��һ����ݔ���ݔ��(MIMO)���Ǿ��ԡ�������ҕr׃�ı��،������ڱ��،���ď��s�ԣ�ֱ�ӌ����˽���늙C�D�ؿ��Ƶ����y��ͨ�^ʸ�����ƣ�������늄әC��Ч��ֱ��늄әC���Ķ��@���^�õ��D�����ԡ�
������������W�ߌ����ʹ늙Cʸ�����Ƶ�Ч�������@���M�������P���о�������ʸ�����ƵĻ��A�ϲ���ģ��������[1]��ģ��������һ�N����Ҏ�t�Ŀ��ƣ����OӋ�б��،�����Ҫ�������_�Ĕ��Wģ�͡�ģ�����������ԫ@�����õĄӑB���ԣ����o������ϵ�y���o�B�`�
�����ڷ���ʸ�����ƵĻ��A�ϣ��Y�ϳ�ҎPID��������ģ�������������c������ģ��PID������������������늙C�{��ģ�͡�ͨ�^�c���y��PIDʸ������ģ���M�б��^��Ԕ���f��ԓģ�͵����c��
1����늄әCʸ������
�Ԯa��ͬһ�����D�ńӄݞ�ʄt����������늄әC�Ķ��ӽ������ia��ib��ic��ͨ�^���࣯--��׃�Q���Ե�Ч�Ƀ����oֹ����ϵ�ϵĽ������i����i������ͨ�^ͬ�����D׃�Q�����Ե�Ч��ͬ�����D����ϵ�ϵ�ֱ�����id��iq��
�����D�Ӵ�朶���l���r����늄әCģ�ͣ�ȡd�S�����D�Ӵ��ʸ����r����M�S��T�S����r��D90������ֱ��ʸ����r�����������D�Ӵ�朦�r��������M�S�ķ��˕r�Ц�rd=��rM=|��r|,��rq=��rT=0���õ��˕r늴��D�غ�늉����̞飺
ʽ�У�p��O������L m�黥�У�L r���D��늸У�L s�鶨��늸У�R s�鶨����裻  ��p�������ӣ�  ��ͬ�����D�٣��� r��늙C�D���D�٣��� s�����D����D�٣�  �� �����Ϲ�ʽ���Եõ����½Y����
�D�Ӵ�朦�r�H�ɶ��������ŷ���isM�a�����c�D�ط���isT�o�P��ʽ(5)߀������rm�cisM֮�g�Ă��f������һ�A�T�ԭh����������������isMͻ׃�r����r��׃��Ҫ�ܵ���őT�Ե���ϣ��@��ֱ��늙C����@�M�đT��������һ�µġ�
�D�Ӵ�朵�λ�ÿ���   �ó������ڽ�������늄әC���������D�Ӵ�朵ij�ʼλ�æ�r(0)���ɶ�������Q���ģ����ϵ�y�\�Еr�Ͳ���ʸ�����ƣ��t�����J���r(0)=O���õ����λ�æ�r����ͨ�^���D׃�Q�õ�����������isM���M������ʽ(5)���ɰ��rM������ʩ��������[2]��
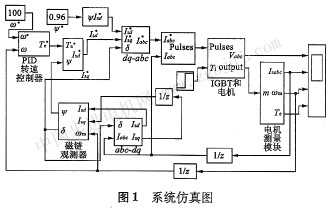
�D1�Ǹ�������ԭ��������ϵ�y����D������늄әC���������PWM��׃������ӣ��D�ٿ����������o���D���c���y�D��֮��õ��D������ֵTe���D���������isT���D�ٿ�������ݔ��Te���D�Ӵ�朹�Ӌֵ��rM�M��Ӌ�㣻isT��isM���^�����D׃�Q��2��3׃�Q���õ���������o��ֵia��ib��ic��ia��ib��ic�c���y�������ia��ib��ic���������������ݔ�룬���������ݔ����׃��PWM�|�l��̖��������׃���Ӯ���늄әC�\�С�
2ģ��PID����
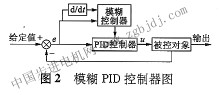
���y��PID�����㷨�Y�����Σ����ڴ�����Ŀ����^�̶��������õĿ���Ч���������ԣ������������x���_����Փ�����wϵ�����ґ��ý���S������˱��V�������ڌ��H���̮��С����ǣ���ҎPID���������ڷǾ��ԡ��r׃��ϵ�y��ģ�Ͳ������ϵ�y�o���M�кܺõĿ��ƣ���PID���������������y���Ǹ����o�����������o���õ��A�ڵĿ���Ч����
ģ��������һ�N����Ҏ�t�Ŀ��ƣ�ֱ�Ӳ����Z���Ϳ���Ҏ�t�����OӋ�в���Ҫ�������،���ľ��_�Ĕ��Wģ�ͣ����ʹ�ÿ��ƙC���Ͳ������ڽ����c���⣬�OӋ���Σ����ڑ��á��ɹ��I�^�̵Ķ����J�R���l�����^�������Z�Կ���Ҏ�t�����ģ�����ƌ���Щ���Wģ���y�ԫ@ȡ���ӑB���Բ������ջ�׃���dz��@���Č���dz��m�á�
����ģ������Ҳ�����������ɿ˷���ȱ�c��ģ����������ݔ��һ���c�`��`��׃�������P������@�N������ֻ�б���һ�����ã��]�зe�֭h������Փ�Ϻ��y�˷����B�`�����у��߽Y���������Ϳ��Ԙ��ɼ��Ѓ��߃��c��ģ��PID(Fuzzy��PID)�����������ԣ�ᘌ����،�������ԣ��҂��x������ģ�����������oPID�������ھ�������PID�������M��ģ������������PID�������Ŀ��Ʋ��ԡ�
ģ��PID������Ҫ���ҳ��ڲ�ͬ�r�̕rPID�����������ce��ec֮�g��ģ���Pϵ�����\���в����z�ye��ec������ģ������ԭ��팦���������M���ھ��ģ��ԝM�㲻ͬe��ec�����ƅ����IJ�ͬҪ�Ķ�ʹ�ñ��،���������õĄӡ��o�B���ܡ�
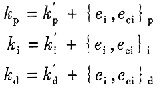
PID������������횿��]����ͬ�r�����������������Լ��֮�g���Pϵ���ɂ��y����֪���ڿ����^�̌�����kp��ki��kd��������Ҫ�����£�
��ƫ��|e|�^��r�����˼���ϵ�y��푑��ٶȣ���ȡ�^���kp��ͬ�r���˱��������_ʼ�rƫ��e��˲�g׃����ܳ��F�����^Ͷ�ʹ�������ó����S�ɷ�������ȡ�^С��kd��ͬ�r���˷�ֹϵ�y푑����F�^��ij��{�������e�����ü������ƣ�ͨ��ȡki��=0��ȥ���e�����á�
��|e|��|ec|̎���еȴ�С�r������ʹϵ�y푑������^С�ij��{��kp��ȡСһ�c��ki��kd��ȡֵҪ��С�m�У��Ա��Cϵ�y��푑��ٶȡ�
��|e|�^С���ӽ��O��ֵ��r����ʹϵ�y�������õķ��B���ܣ�������kp��ki��ȡֵ��ͬ�r�����ϵ�y���O��ֵ�������F��ʎ�������]ϵ�y�Ŀ��ɔ_���ܣ���|ec|�^С�r��kdȡֵ���^��Щ����|ec|�^��r��kdȡֵ���^СЩ��
ƫ��׃�Q��|ec|�Ĵ�С����ƫ���׃���ʣ�|ec|ֵ�^��kpȡֵԽС��kiȡֵԽ��[3]��
ᘌ�ʸ�����Ƶ��D�ٿ��ƣ���ģ��Ҏ�t�У��`��e���`��׃��ec������ϵ��kp��ki��kd�Z��׃��ֵȡ{NB��NM��NS��ZO��PS��PM��PB}��e��ec��Փ�����(һ6��6)��kp��kd��Փ�����(-1��1)��ki��Փ���(-O��5��O��5)���`�ٶȺ��������Ƿֲ���
���˫@�þ��_�Ŀ�������Ҫ��ģ�������܉�ܺõر��_ݔ���`�ٶȺ�����Ӌ��Y�������IJ��ù��I�����ЏV��ʹ��ȥģ������֮һ�ļә�ƽ��������ԓ����ᘌ�Փ����ÿ��Ԫ��xi,����������ЛQݔ��ģ�����ϵ��`�ٶ�u(i)�ļә�ϵ������ȡ�˷exiu(i)����Ӌ��ԓ�˷e�͡� xiu(i)�����`�ٶȺ͵�ƽ��ֵx o����:  ��ƽ��ֵx 0���Ǒ��üә�ƽ������ģ��������õ��ЛQ�Y���������ݔ���������ӳ���x 0���Ķ��õ��������Č��Hֵ�� ݔ�뵽PID�������Č��H�����t�飺
3����Y��������
�O������늄әC�����飺�~������Pn=500 w���~����늉�Vn=127 V���O����P=2���������Rs=4��495 �����D�����Rr=5.365��������늸�Ls=0��165 H���D��늸�Lr=O��162 H������Lm=0.149 H���D�ӑT����J=O��00 095 kg��m2��ճ������ϵ��B=O��������������h���Ȟ�h=O��2 A��ֱ��ĸ��늉���Vdc=350 V��ϵ�y�зe�����c���f�����xɢ���ɘ���
�ڞ�Ts=2��s[4]���O���D�ٿ�����kp=10��ki=26��kd=10��
ͨ�^Matlab��Simulink��늙Cʸ�������M�н�ģ��������늄әC�M�п��d׃�ټ����ټ��d�\�з���[5]��
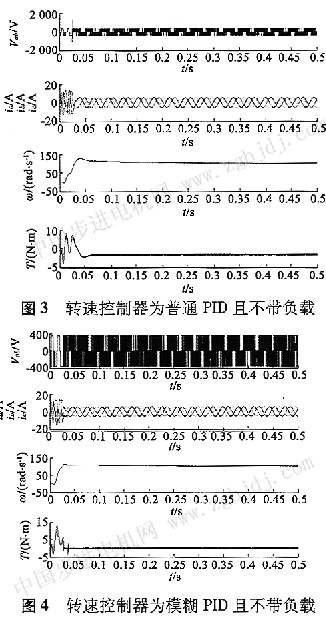
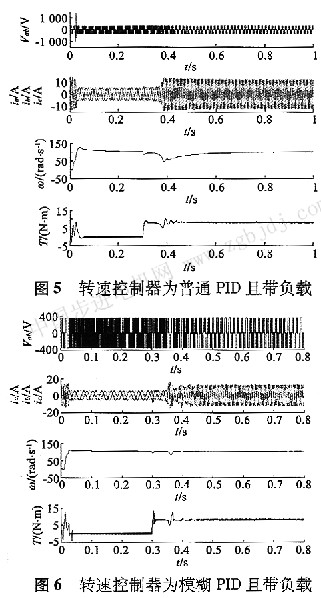
�D3�͈D4��늙C���d�l�����\�Еr�ķ����������D5�͈D6����0��3 s�r�o늙C����T1=8 N��mؓ�d�r�ķ����������ĈD3�п�������ؿ��������D�ٿ���������ͨPID�r��늙C�D����O��3 s�r�_������ݔ����B��늙C�D����O��06 s�r���֞��㡣���D�ٿ�������ģ��PID�r���ĈD4�пɿ�����늙C�D����0��25 s�r���_������ݔ����B��늙C�D
��O��04 s�r�����֞��㡣
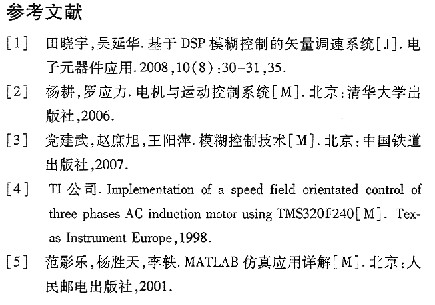
�ĈD5�п��Կ�������ͨHD����ؓ�d�r��늙C�D�ٴ���һ�����@��˲�r�����^�̣��D����O 8 s���_��������늙C�D�ؼs��O��5 s�rݔ�����ַ�����
����Y��������ģ��P1D�ĄӑB푑��죬���B��ۙ���ȸߣ��D�ؾ���˲�r푑����ԡ���늙C����Խ��������ؓ�dԽ����Ч�����������@��
4�Y�Z
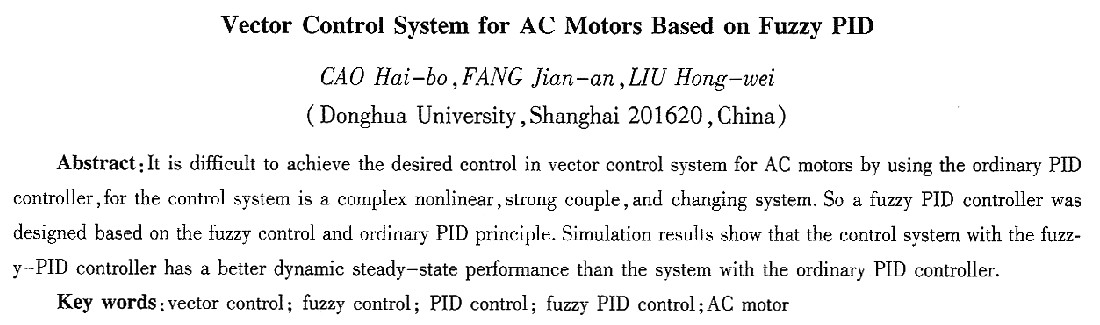
�����y��PID�������c���Mģ��������Y�ϣ��ȱ����˂��yPID�������Y�����εă��c���ְ�ģ��������Ч�ؑ��õ���PID�����{���У����F��ϵ�y��****���ơ�����Y���C���˲���ģ��PID���ƣ�ϵ�y��푑��ٶȼӿ죬�{��������ߣ����B����׃�ã����қ]�г��{����ʎ�������^���������ԣ��@����ͨPID�����y�Ԍ��F�ġ����ڷǾ��ԡ��r׃�Ķ��D6�У�ģ��PJD����ؓ�d�r��늙C�����ϱ���ԭ���D�٣�˲�r���䲻���@��늙C�D�ؼs��0��4 s�rݔ�����ַ�����
|