����늄әC�{�ٿ���ϵ�y�OӋ
��܊�h1����ѩ��2
(1�������̴�W���������710048��2���������ռ��g�ߵȌ��ƌWУ���������710077)
ժҪ���\�������}���{��(SPWM)���g���Ԕ�����̖̎����(DSP)оƬTMS320LF2407����ģ��o�����ܹ���ģ�KIPM�������ⲿ�������OӋ��һ�Nͨ�î���늄әC׃�l�{��ϵ�y��Ԕ����B��ϵ�y��Ӳ���OӋ���o����Ӳ�����OӋ������ܛ�����Ƴ�����Ҫ���������SPWM�Д���ճ���M�ɡ����Y��������ԓ����b�ýY�����Σ����ƾ��ȸߣ�ݔ������C��ʧ��С�����^���Č��r�ԡ�
�P�I�~��TMS320LF2407A��IPM����������늙C��SPWM
�ЈD���̖��TM343 �īI���R�a��A ���¾�̖��1004-7018(2010)01-0057-04
0����
PWM���gͨ�^����늉��}�_���Ⱥ�늉��}�_���е��������_��׃����׃�l��Ŀ��[1]��PWM���Ƽ��g�ֳ���������}��PWM�������Ҳ�PWM��(SPWM)����朸�ۙPWM��(SVPWM)�������ۙPWM���ȡ�����SPWM�·���ɵ�׃�l�{��ϵ�y����Y�����Ρ��\�пɿ�������Ч���@����ͻ�����c�Լ����M��IGBT���g���õ��V�����á�
�F��PWM�����·�����þ��и���ݔ����HSO�Ć�Ƭ�C��������̖̎����(DSP)��ͨ�^ܛ����������PWM�������݃x����TMS320LF2407�����������r̎�������Ϳ��������O���ܼ���һ��������̎�����ܸ���(30 MIPS)�����O���ɶȸ��ߡ�����惦����A��D�D�Q�ٶȸ�������c����늙C�Ĕ��ֻ������^���m��[2]�����Ľ�B��ϵ�y���w�OӋ��������TMS320LF2407A��������оƬ�����F�ˮ���늄әC׃�l�{��ϵ�y�����Y��������ԓ����
ϵ�y����Ӳ���·���Ρ�ܛ���������ס����ƾ��ȺͿɿ��Ըߡ����r�ԏ��ȃ��c��
1ϵ�y���wӲ���OӋ
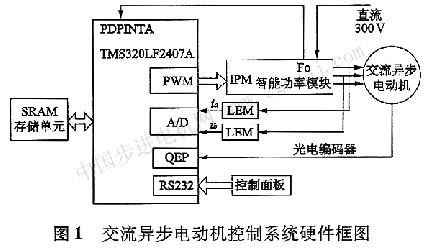
����ϵ�yӲ���·�ɿ����·�������·�Լ�������������ֽM�ɡ�ϵ�y��Ӳ�����ܿ�D��D1��ʾ��
1.1�����·
�����·��TI��˾��늄әC���ƌ���оƬTMS320LF2407A DSPоƬ����ģ�����������74ϵ��оƬ�Ϳɾ���߉����������Ҫ�����Ǯa��SPWM��̖��ԓ��̖��34ᘵ��ž����������·���Á���������׃�����ɂ���������������z�y��������늄әC�������˲�rֵ�����˵�DSP��AZD�D�Qģ�K������}�_���a��(ÿ�Dݔ��200���}�_)�z�y��������늄әC�����D��λ���Լ��D���ٶ���̖����������x�����DSP�IJ��@��Ԫ�����þ��a
����Ŀ���Ǚz�y������늄әC�ӵ�ؓ�dλ����Ϣ���ɴ˿��Ԍ�ؓ�dλ�õ��M�п��ơ������{ԇܛ���ķ��㣬߀ʹ���˾�����늡��քӏ�λ���Դ늉��O�ع��ܵď�λоƬMAX825S�����Դ������Dc��Dc�Դģ�K24 V�D5 V�Լ�Ac��Dc�Դģ�K220 V�D��15 V�M�ɣ�����5 V�Դ���˽o�����ϵ�5 VоƬ��늾��a����̖���x�����ݔ���ȹ���⣬߀���ԴоƬTPS76833���˺�o���������ṩ3��3 V���Դ��
1��2�����·
�����·����Ҫ��������PwM��̖�Ŀ�����300 Vֱ��ݔ��늉��M����׃����׃��Ľ���늉��Á��ӽ�������늄әC��������׃���x�����ձ����˾���a�ĵ�������ܹ���ģ�KPS21865��PS21865��ͻ�������c��P�ȵ���ֻIGBT���w��ʹ�����e�·������Ե����Դ���Ķ�����ֻ��һ��15 V�Դ����P�ȵ���ֻIGBT���w�ܵĿ����Դ������ԓ15 V�Դ�cP�ȵ���ֻTGBT���w�ܵİl��O������x�����Ҳ������N�ȵ���ֻIGBT���w�ܵĿ����Դ[3-4]�����������·ֻ��һ�������Դ���c��ǰ��Ҫ�Ă����x�Դ�����ܹ���ģ�K��ȣ������·�ĽY���������w�eҲ�pС���ɿ��Ա���ǰ������ߡ�
��׃�l�{�ٿ���ϵ�y���ϱ��o�h���У��O��������·�^����Ƿ�����^�ᡢ�^�d���ƄӮ�������늾��a�������ྀ�ȱ��o��������̖��ܛӲ����ϙz�y��һ�����F���o��̖��ͨ�^ܛ����Ӳ��߉�������iPwM����̖��
1��3����z�y�·
����z�yģ�K�ǰ����ඨ������D�Q�������Ķ��M�ƴ��a���Է���̎����ϵ�y�����Rķ��˾���a��LEM�������������ģ�KLA25-NP��z�y�����LA25-NP�Ƕ����̵Ļ������������ [5].��������늙C���~�������5 A�����������x��25A��LA25-NP��˲ɘ�����100�����ɘ���������  ��Q��������V c��ģ�K�Դ늉���VCE�龧�w��͉�����I s��ݔ�������R i����������衣 LA25-NP��ݔ�����������̖����회�ԓ�����̖�D�Q��늉���̖����LA25һNP��ݔ������ؓ����������̖�����D�Q�õ���늉���̖Ҳ����ؓ����TMS320LF2407A��Ƭ��A��D�D�Q����ݔ�˞�0��3��3 V��늉���̖�������Ҫ�����{�����ƽ�����·�Լ����A�����V��������ؓ�O�Ե�늉���̖�D�Q��TMs320LF2407A��A��D�D�Q������ĆΘO��
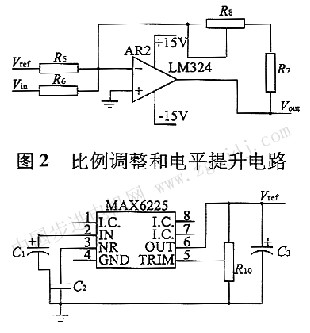
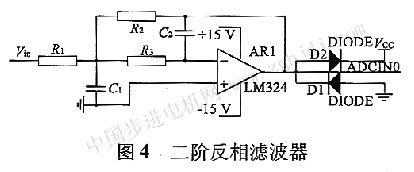
늉���̖�������{�����ƽ�����·��D2��ʾ�������\���������{����ͬ�rȡ����늉�Vref�����ƽ����늉����@�ӿɌ�ǰ��-2��5��2��5 V��늉�������O��5 V����ϵ�y�x����MAKIM��˾��MAX6225�ṩ��2��5 V늉����酢������D3��ʾ��
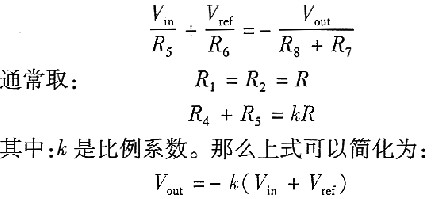
�ĈD2���Եõ�ݔ����̖Vin��ݔ����̖Vout���Pϵ��
����ʽ���Կ�����ݔ����̖Vin��Vout��������ݔ���Ĵ�С�����ñ���ϵ��k���{��(����ϵ�������ÿ��{���R8�{��)�������{�����ݔ����̖Kout׃��ֵؓ������ʹ��K��̖�M��TMS320LF2zt-07A��A��D�ɘӆΘO��늉���Ҫ���V���·�x����A�����V��������D4��ʾ���@�ӿ���ͬ�r�M��V����������ʽVout=-k(Vin+Vref)��̖ؓ��Ҫ��O-5 V��늉�ͨ�^10 kn��20 kn����贮�։��sС��0��3��3 V��Ȼ������TMS320LF2407A��A��D�D�Q��ADINO��ADINl�����y�õ���С��1��65 V�r���f�������ؓ�ģ���֮�t������������ġ�
1.4�D�ٺ�λ�Ùz�y�·
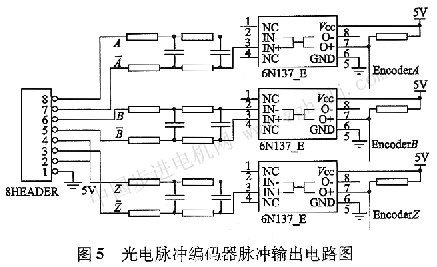
��������늄әC���D����ͨ�^����}�_���a���z�y�ģ�늙C�D�ٙz�y�����_�Ժ;��Ȍ�ֱ��Ӱ�ϵ�y�Ŀ��ƾ��Ⱥͷ������Լ�늙C�ĄӑB���ܡ���늙C�\�Еr��늙C���S���ӹ���}�_���a�����D������·ݔ�����քe��A�ࡢ/A�ࡢB�ࡢ��B�ࡢz�ࡢ��z�࣬����A�ࡢ/A�ࡢB�ࡢ��B�����ڜy�٣���������λ���90����ÿ�DһȦݔ��1 024���}�_����z�ࡢ��z���}�_��ÿ�DһȦݔ��һ���}�_�����ڽ����ŷ�ϵ�y�еĶ�λ�����ڹ���}�_���a����ݔ���Dz��ݔ������TMS320LF407A�ľ��a���ӿڲ����ղ����̖�����Ա�횰Ѳ����̖���^Ӳ���·̎���ſ����B�ӵ�TMS320IJ2407A�ľ��a���ӿ�[6]��Ӳ��̎���·��D5��ʾ��
2����ϵ�yܛ���OӋ
���F��������늄әC��׃�l�{���ж�N���������IJ��Â��y�ĺ㉺�l(V/F)�ȡ��ٶ��_�h��λ���]�h���Ɓ팍�F׃�l�{�١�sPwM�}��Ӌ���������̈D��D6��ʾ��
 ��������sPwM��̖������ԭ��������Ҫ���벽��ĸ���ڬF�������У����Һ���ֵ���S�Ƕ��B�m׃���ģ�����O����360���ķ������Пo�F�����Ƕ�ֵ�����Һ���Ҳ�Пo�F����ֵ�ͽǶ�ֵ������������Ӌ��C�У��s�o�����F�����B�m�^�̣�Ӌ��Cֻ�ܮa���cO����360��֮�g���ނ��Ƕ�ֵ���������ނ����Һ���ֵ�����O��O����360���ķ���ƽ���ֳ�20���g�����tÿ�ɂ��g��֮�g���ஔ��18�������Ӌ��C��ÿһ���g��ȶ�ݔ��һ������ֵ����ÿ��18����ݔ��һ��ֵ���t��360���ķ����ȹ���20��ֵ���҂��������Ѓɂ��g��֮�g�ĽǶȷQ�鲽�ࡣ�ڱ����У����õ�sPwM���Ʒ����Ǯ����w�{�Ʒ����������d�����l�ʲ�׃��������̖���l���S��ʹ��Ҫ���ڲ���׃���ģ�����d�������ڲ���׃���ġ����d���Ⱦ͵���һ���������ڃȵ��}�_������������̖���l���ڲ���׃���r����һ�����ڃȮa�����}�_��Ҳ�ڲ���׃��������������̖���l��Խ�̣���һ�����ڃȮa�����}�_����Խ�٣���������̖���l��Խ�ͣ���һ�����ڃȮa�����}�_����Խ�ࡣ������}�_���������е��g������һ���}�_����һ���g�����t�}�_���͛Q���˲���Ĵ�С��һ���������ڃ��}�_��Խ�٣������Խ��һ���������ڃ��}�_��Խ�࣬�����ԽС���ɴ˿�Ҋ��Ӌ��C�Юa�����Һ����Dz������Sʽ��������360���ֳ�N����ÿһ������һ�����࣬��ݔ��һ������ֵ�������еIJ�������r���ͮa����һ�����ڃȵ����к���ֵ���ڱ���ܛ���OӋ�У��d�������O����400��s��������̖��****�l�ʞ�100 Hz�����������ڞ�l0 ms���˕r���d���Ⱦ͵���10 ms��00��s=25����һ���������ڃ���25���}�_���c������̖****�l��i00 Hz�������Ę���ֵ��65 636������������̖��****�l�ʞ�100Hz�r�������IJ�����****ֵ65 636��25=2 620�����ݔ���l��С��100Hz���Ɍ��cԓݔ���l�ʌ����Ę���ֵ����****����ֵ2 620��������cԓ�l�ʌ����IJ���ֵ��
�ڱ����У�����ֵ��ͨ�^����ķ�ʽ���@ȡ�����Һ������nj�0����360������ƽ���ֳ�256�ݣ�ÿһ�ݾ͵���1��4O����ͬ�rҎ��1����ʮ�M�Ɣ�182��ʾ���@�ӣ�1��41���Ϳ���ʮ�M�Ɣ���256��ʾ����ÿ�����ɷ�֮�g���g����ʮ�M�Ɣ�256�������@256�����Һ���ֵ�Ǵ惦��DsP��Fiaskt ROI�惦���У���˿���ͨ�^�@ÿһ������ֵ�ĵ�ַ���@��ԓ����ֵ��
sPwMӋ������sÿ400��s����һ�Σ��ڳ�ʼ�������Ќ����Һ����ĽǶ�ֵ�O��O�����Ժ�ÿѭ�hһ�ξ���ǰһ�νǶȵĻ��A������һ�����ࡣ����l����ʮ�M�Ɣ�182��ʾ���@�ӣ����Һ�������ÿ�ɷ�֮�����g��(1 41��)�Ϳ���256��ʾ����������16λ�Ĵ������惦�ģ���****ֵ��ʮ�M�Ɣ�65 535�������Һ������ֱ��ֳ�256�ݣ��ٛ]ÿ��ѭ�h�����ӵIJ���ֻ�ஔ�����Һ������е�һ����������ÿ��ֻ����256���@�ӽ��^256��ѭ�h(�ஔ�����^360��)������ӵ�65 535���_��16λ�Ĵ�����****ֵ����65 535���ñ�ʾ360��(65 535��182=360)�����������ٽ��^һ��ѭ�h������һ�����࣬�t�͕���������ֻ�����һ��ѭ�h�r���ӵIJ��ౣ�������������_ʼһ���µ��������ڡ�
������cݔ���l�ʌ����IJ����ԓ�������256���õ����̾ͱ�ʾԓ�������������Һ������ı����ٲ������磺��������512�r������Ҫ�����Һ������������ڱ������^2������������l 024�r������Ҫ�����Һ������������ڱ������^4������������1 037�r������Ҫ�����Һ������������ڱ������^4�����@�r��Ҫ����������13�G�����������С��256�����ڲ������Һ������е�һ�������Ա���ѭ�h�c��һ��ѭ�h��õ���ͬһ������ֵ���@�ӣ�������������̼������Һ������ı���ַ�͵õ����Һ���ֵ��Flash ROM�еĵ�ַ�������˵�ַ��DSP�IJ��ָ��TBLR�͵õ�����Ҫ�����Һ���ֵ����ͬ�ӵķ��������V�ࡢW�������ֵ��
��SPwM�}����Ӌ���^����߀��Ҫ֪���{�ƶȣ��ɸ���V/F������õ�ݔ��늉�ֵ�����{�ƶ�M���ɸ��������Q�ɘӷ�Ӌ�㹫ʽT=
����Tc�������d������[1]���քeӋ��u��y��������}���������@Щ�}��ֵ�Ϳɷքe����������^�Ĵ���cMPRl��cMPR2��cMPPC����ֵ��
�������״α����Еr��߀�����Ӷ��r��l�����˱��C�d�����ڞ�400��s��������Ҫ���Ͳ���ز�ԃ�����Д���־λ��ֱ���l���^�����Д�(�����Д�ÿ400��s�l��һ��)��֮�������Д���־λ���㣬�����M����һ݆Ӌ�㡣���ˣ��������һ݆SP��wM�}��Ӌ�㡣
3�Y�Z
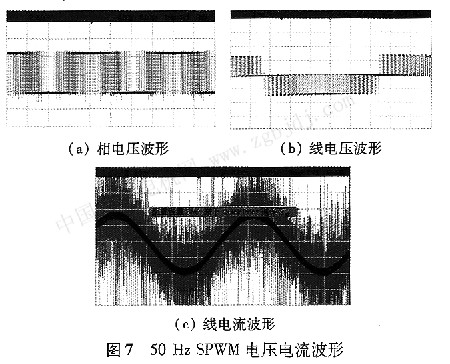
ͨ�^��һ�_��������늄әC�ό��քe�õ���sPwM��늉�����늉���������IJ��ΈD����D7��ʾ�����d���l�ʞ�2��5 kHz�������{�Ʋ����l�ʞ�50 Hz��
|