����dSPACE���L���D��ϵ�y�������OӋ
�Ƕ������o־��
(���ϴ�W�����K�o�a214122)
ժҪ���錍�F�L���D��ϵ�y�������Ŀ����_�l����B��һ�N����dsPAcE���L���D��ϵ�y�������OӋ������ԓ��������dsPAcE�Ŀ��ٿ���ԭ�ͷ�ʽ��dsPAcEϵ�yܛӲ���h��������M��ah��simulink��ϵ�y��ģ�����OӋ����׃���L����\�Б��l늙C�M�����Č��r����ϵ�y���������ƅ����M���ھ��{�������ƌ��H�����ܡ����Y������������dsPAcEƽ�_���Կ�������L���D�Qϵ�y���Ƶ��о����_�l���s�̿���ϵ�y���_�l���ڣ��@�ÝM��Ч����
�P�I�~��dsPAcE�����ٿ���ԭ�ͣ��L���D�Qϵ�y�����r����
�ЈD���̖��TM346�� �īI���R�a��A ���¾�̖��1004��7018(2010)01��0048��03
 O�� �� �S��ȫ���Եij�Ҏ��ʯ��Դ�����ȱ����h�����R���������L�ܰl��ܵ����ȸ��������˾�������I���Pע�������L늙C�M���Ŀ������OӋ��Ҋ��Q�����У���̎���������I����Ӌ��C��PLc+Ƕ��ʽ�Ȍ��r����ϵ�y�����_�lƽ�_[1-2]�������L���D�Q����ϵ�y���^���s�����Ϡ�B���_�����ҿ����㷨�漰�����Č��rӋ�㣬��Ҫ���������ij�����a���@Щ����ƽ�_���_�l�����L��
dsPAcE��һ���������ھ������ϵ�yܛӲ��ƽ�_[3]���Ĕ���̎���ٶȡ�푑��r�g�������_����������M�㌍�rϵ�y���������ͬ�r��dsPAcE���r�Ⱥ˲���RMs(Reservoir M0deling system)�{�Ȳ��ԁ�M�㌍�r�������Ԅ����ɴ��a��������RTw(Real��me worksh0P)��RTI(Real��Time In��tefafce)��֧�֣��o�辎�̣��ھ�ģ�Ϳ������Ɍ��r���a�����ԄӾ��g���B�ӡ����d�����rӲ�����\��[4-5]������dsPAcE���L���D��ϵ�y����������
���ٽ�Q�L�C�C늿���ϵ�y���OӋ���_�l��ԇ�����^���е��؏������ӿ��������ڣ��p���YԴ���M����������ϵ�y���аl������
���ĸ����L���D��ϵ�y����ԭ��������dsAPcE�����L늙C�M������Ӳ���_�lƽ�_������Matlab��simulink�����L���Cģ�M���L���D��ϵ�y����ģ�ͣ�����RcP��ʽ����Ӳ���ό��r�\�У����ҽo���ˌ��Y�������Y���C��ԓ�������Ɍ��F�L��****���@�ȹ��ܡ�
1������Ӳ���OӋ
�����L���D��ϵ�y������Ӳ�������Y����Dl��ʾ��ϵ�yӲ����Ҫ�������岿�ֽM�ɣ�Pc�C��dsPAcEӲ��ƽ�_����̖̎���塢׃�l���c�Б�늙C�����L���C����׃���c�Б�늙C���ɰl늙C�M��
ƽ�_����dSPAcE AutoBoxӲ��ϵ�y������̎������dSl005��M0torola��˾��P0werPc750�����l480 Hz��ͨ�^��̫�W�cPc���C�M��ͨ�š�I��O��ds2210����ģ�M��ݔ�롢ݔ����PwMݔ�����ܣ�I��O��ds4002�����}�����@�ȹ��ܣ������m���ڶ�NI��0��ۣ�ͨ�^32λ��PHs�����c̎������dsl005�M��ͨ�š���̖̎�����ǘ˜ʻ��cdsPAcE
���B�Ľӿ���̖��ͨ�^��̖�{���·��ʹ���늉�׃�������ٶȵ��}�_���a����ݔ����̖�M��I��O��ӈD 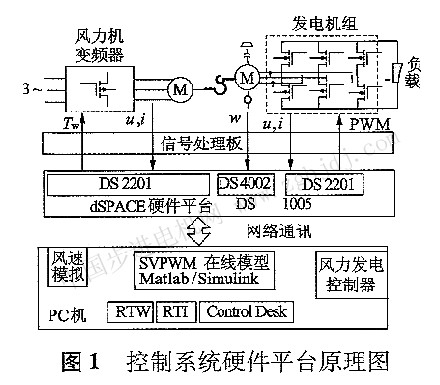 ��Ҫ��ͬ�rݔ��ģ�M늉���PWM��̖��늙C���ØO������4��6����\�Б�늙C�� ԓ�������_�lƽ�_�о����L���Cģ�M��׃���L����\�Б��l늙C�M�Č��r����ϵ�y��ϵ�y�O�غ����������ܡ�
1.1�L���Cģ�M
���î�������늄әC����ϵ�y��ģ�M�Lͨ�^���~�a����ݔ�뵽�l늙C���D�ء����ɮ�������늄әC��׃�l����dsPAcEܛӲ��ƽ�_ϵ�y���ɡ���dsPAcE���F�L���Cģ�M���ӿ�Ds 2201���ͨ�^��̖̎���壬���ս���늙C�����������늉���̖����dsPAcE���F�L���Cģ�M��ģ�M�L���Cݔ���D��te��̖�o׃�l������늙C��
l.2�l늙C����ϵ�y
ͨ�^������׃��PwM�����ưl늙C��늴��D�أ�������\�Б��l늙C����׃����dsPAcEӲ��ƽ�_���ɡ�dsPAcE�ӿ�Ds 2201��Ds-4002���ͨ�^��̖̎������ܰl늙C���������늉���늙C�D����̖��ݔ�����ưl늙C�D���D�ص�PwM��̖��
1��3����ϵ�y�O�غ���
����dsPAcEܛ��ϵ�ycontrolDesk�C�ό��h�������F���L���D�Qϵ�y���rӲ���ĈD�λ��������ڹ���ϵ�y�����ϣ����Խ����Ñ�̓�M�x������ҕ������׃���ͅ�����
2�L���D��ϵ�y��ģ
2.1�L���Cģ�M
����ؐƝ��Փ���L݆�C�a���ęCе����[7]�飺
ʽ�У�p��՚��ܶȣ�R���L���C�L݆�돽��V���L�٣�C p���L���D�Qϵ���������~���ٱȦ˺͘��~����Ǧµĺ������~���ٱȦ˞��L݆�~�⾀�ٶ��c�L��֮�ȣ����D  ���L݆�ęCе���ٶȡ��L݆�C�a�����L���أ� ʽ�У�C r(�ˣ���)���D��ϵ����  ���~���L�����r���{���l늙C늴��D�ظ��S�L��׃����ʹCr(�ˣ���)�_��****ֵ�����F�L�ܵ�****���@���ڸ����~���L�ٕr����Ҫͨ�^�{�����~����Ǧ£��Խ���Cpֵ��ʹ�l늙C���ʱ������~������̎���������L����ƽ���L�ٺ��}���L�٘��ɡ�ƽ���L��ֵ��7 5 m��s���}���L���ɾ�ֵ��O���˜ʲ��1�ĸ�˹�S�C����f1(u)���ɡ�
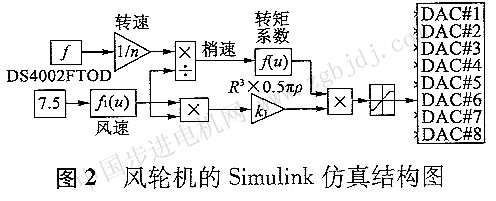
���O���~����Ǧ¹̶����tCr��(�ˣ���)=Cr(��)�������������L݆�C���Wģ�͵Ļ��A�ϣ�����Matlab����h���������ķ���ģ����D2��ʾ��
���У�DS4002FTOD�l��ģ�K�ɼ�늙Cͬ�S���a���}�_��̖���V�����D�Q������D���D�٦أ��D��n��ϵ�����L��ģ�K����ƽ���L�ٞ�7 5m��s���L�٣�f 1(u)�����dz������L���C�L݆�돽������  Ӌ��õ��~���ٱȣ�ģ���е��D��ϵ���麯F��C r(��)�����泼=0��5��p����ʽ(2)Ӌ��õ��L��T��1�������DS2201DAC��Blģ�K����̖ݔ���o׃�l�������D�ؿ�����̖�� 2��2�L���D������ϵ�y��ģ
�ڷ����L���D��ϵ�y���Wģ�͵Ļ��A�ϣ��������L��****���ʿ��ƞ���������Matlab��smulink�������L���D������ϵ�y�ķ���ģ�ͣ�ϵ�y����ģ���ɹ��ʭh���ƺ��D�حh���ƃɲ��ֽM�ɡ�
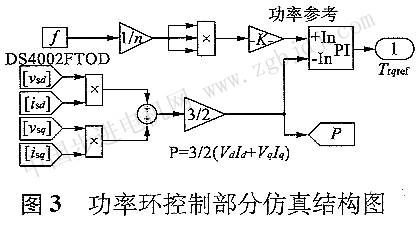
�D3�鹦�ʭh���Ʋ��ַ���Y���D����DS4002FTOD�l��ģ�K��Ӌ����D���D�٦�1��ͨ
�^ʽ(3)�ù��ʅ���ֵ�����Ц˦�1��****�~���ٱȡ�
DS2201ADc��B1��12λ6ͨ����A��Dģ�K���ɼ��l늙C�����늉���̖����ʽ(4)��Ӌ�㌍�H�ķ�������P�����������ʺͷ�����������PI�{������������ݔ���Dž����D��Ttqref��
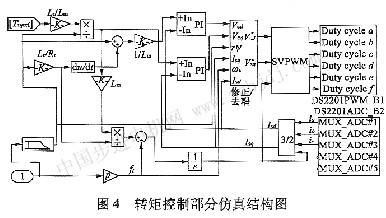
�D4����\�Б��l늙C�D�حh���Ʋ��ַ���Y���D��ԓϵ�y����dSPACE�ĸБ��l늙C�ھ�ģ���OӋ[6-7]���D����Ҫ����ʸ������ģ�K��Ud��Uq����ģ�K������׃�Qģ�K���D�ؿ���ģ�K��sVPwMģ�K����̖ݔ�롢ݔ��ģ�K���l늙C�D�حh���Ʋ��ֵ�ݔ����̖���ɹ��ʭh���Ʋ���ݔ�������D�ء�늙C�D�ٺ�������M�ɣ�ݔ����̖��sVPwMģ�K����
PwM��̖�ͽoDS2201PwMģ�K��DS2201PwMģ�K��PWM��̖���^���x�o��׃�·�����ưl늙C�D�ء�
3���Y��
������L���C����6�O3.7 kw��400 V�ĸБ�늄әC���~���D�ٞ�l400r��mim���l늙C����4�O3��7 kw��400V�ĸБ��l늙C����׃���е�PwM�_�P�l���O��10 kHz���L��׃��������5��11 m��s������Maltlab��Simulink�M���������ģ�ͣ����g���d��dSPACEϵ�y�����F�L���D�Qϵ�y���������OӋ�����r���档���r������ÚW����ֵ�e�ַ���(ODEl)���ɘ����ڞ�50��s��PwM���ڞ�100��s������dsPAcE�ṩ�ĸ��N�ӿڰ壬��ԭ�Ϳ������Ϳ��ƌ���֮�g����r����ϵ�y�����F���ٿ���ԭ��(RcP)�OӋ���ڿ����㷨ģ����ͨ�^���r�ӿ�ģ�KRTI��ֱ���L��dSPACE��L��O�ڣ�����������ϵ�y�M���ھ��{��(��������e��ϵ����)���_��ϵ�y�ą���ֵ����C�������Ŀ����Ժ���������ϵ�y�����ܡ�
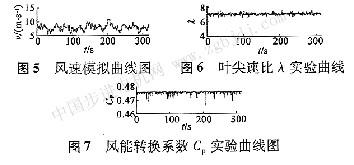
****�~��Ȍ���У��ڦ�opt=7��r���^���~���ٱȦ˺��L���D�Qϵ��Cp���D5���L�ٵ�ģ�M�������D6�錍�H�~���ٱȦˌ���������D7���L���D�Qϵ��Cp������������Y������������dsPAcE�������L���D�Qϵ�y���ʸ�ۙ����ϵ�y�����ɿ����Ҿ��ЄӑB푑��죬���{��С������ϵ�y�@���˺ܺõĿ��ơ�
4�Y�Z
����dsPAcE���ھ����淽�������F����dsPAcE���L늙C�M���Ŀ������Ŀ����аl�����L���l늙C�����㷨���ڌ��rӲ��ƽ�_�ό��F�����r�^�y����ϵ�y�����ܣ����Կ��ٌ��F�L���D�Q����ϵ�y���OӋ�������C��ԓ�OӋ��������Ч�ԣ��s�����_�l���ڣ������ϵ�y�Ŀɿ��ԣ�������ϵ�y�����_�l�ɱ������L���D�Q����ϵ�y���OӋ�ṩ���µ�˼·�ͷ�����
|