��ຯ���ڟoˢֱ��늄әC�����еđ���
�����G�������ޣ�Ҧ�Ԗ|
(�A�|������W���Ϻ�200237)
ժҪ���D��λ����Ϣ�ī@���ǟoλ�Â������oˢֱ��늄әC���Ƶ��P�I���g��һ����û���λ�Ùz�y�·�ķ�늄ݙz�y��������ຯ����ʡ����λ�Ùz�y�·���\�÷�늄���̖��߉�\���Pϵ�ж��yԇ�l�����桱�����١���׃��������������늄���̖��Ӱ푣��@�����_�ķ�늄��^���c��ԓ�����ڻ���DSP�ğoλ�Â������oˢֱ��늄әC����ƽ�_���M�Ќ����C�����y�����C��ԓ����������2��3��ؓ�d�l������Ч�V����늄�̓���^���c���@�Üʴ_�ķ�늄��^���c�����ܿɿ����`���Ժ͌������^�ߡ�
�P�I�~����ຯ������늄��^���c�z�y��̓���^���c���oλ�Â��������oˢֱ��늄әC���V��
�Ї����̖��TEM33 �īI���R�a��A ���¾�̖��1004��7018(2010)01��0045��03
0�� ��
���y�ğoˢֱ��늄әC�@ȡ�D��λ����Ϣ�ķ����Dz������ʽ��C�ʽλ�Â�����ֱ�Ӝy��[1]�����ڴւ������ķֱ����^�ͣ��\�����Բ��ã����h���l�������У�ʹ����������ϵ�y�Ŀɿ��Ժ;��_���y�Եõ����C�����҂�����߀���������늚��B�Ӿ���Ŀ���o���ɔ_�OӋ����һ�����y���ھ��_��λ���ŷ�ϵ�y�����ڿ��g���ޣ��o�����b����������˟oλ�Â������oˢֱ��늄әC�ɞ�������x�����ЏV���İlչǰ����
�ڟoλ�Â������oˢֱ��늄әC(���º��QBLDcM)�����У��D��λ����Ϣ�ī@�����P�I���g��Ŀǰ���õķ����з�늄ݷ��������C������늸Йz�y����������������B�^�y������G(��)�������ܻ����Ʒ���[2]�����з�늄ݙz�y����BLDCM�����Б�����ࡢ�����ķ�����ԓ�����ĺ����ǜʴ_�@�÷�늄��^���c[3]���ڌ��H�����У���늄ݲ�������������β���������PwM�{�Ʈa���ĸɔ_���@�M��늮a���ĸɔ_��[4]����ˣ�һ�㷴늄ӄ���̖��Ҫ���^�։��·��ģ�M�V���·��늉����^�·�Լ��i��h�·�����˿��Ɔ�Ԫ���@�ӫ@�õķ�늄ӄ��^���c��Ȼ����һ�����ӕr����ɓQ���r�̲��ʴ_����������a���h������Q�@�����}���o���Ǝ����y�ȡ�
���IJ��Ó�ຯ������λ�Ùz�y�·�팍�F��늄ӄ��^���c�z�y��ԓ��������Ҫ���s�ĞV�������^�·�����㌍�F���`���Ըߣ����ҿ�����Чȥ����늄ݙz�y�е�̓���^���c���@�Üʴ_�ķ�늄ӄ��^���c����Ɍ�Ԫˢֱ��늄әC��ƽ�����ơ����Č�ԓ����������BLDCM�Ŀ��ƣ����y���~��늉�����ͬؓ�d�l���µ�BILDCM�D�ٺͿ���Ч�ʡ����Y��������ԓ�������m�÷����V��������BLDcM��2��3��ؓ�d��r��ȥ����늄��е�̓���^���c�����CBLDcM�\��ƽ����
1��늄ݙz�y������
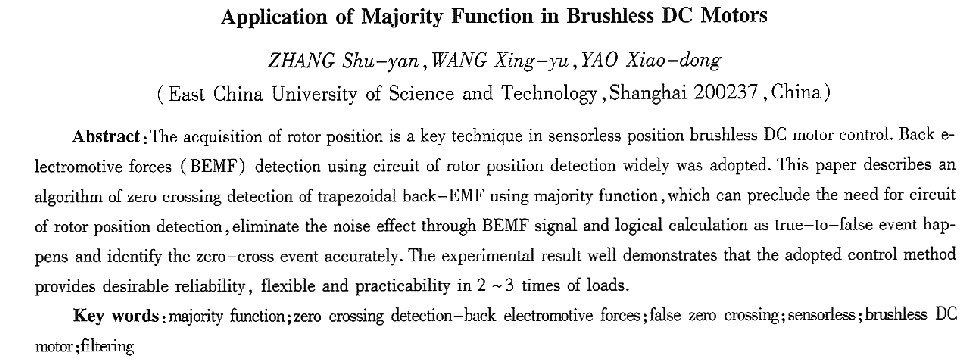
��늄ݷ��Ļ���ԭ�������ں������şoˢֱ��늄әC늘з���Ӱ푵�ǰ���£�ͨ�^�z�y�����_�ࡱ�ķ�늄��^���c�������εõ��D�ӵ������P�Iλ����̖�����Դ����酢��������݆���|�l��ͨ�������ʹܣ���늄әC�\�D[1]��
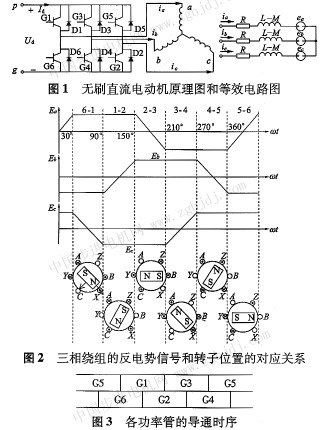
������늘��@�M�������νӷ��ġ���������-120�������͡��ӵğoˢֱ��늄әC�������f����늄ݙz�y������ԭ�����Dl��Ԫˢֱ��늄әC��ԭ��D�͵�Ч�·�D���D2�������@�M�ķ�늄���̖���D��λ�õČ����Pϵ���D3�Ǹ����ʹܵČ�ͨ�r��ͨ�^���ϸ��D�҂����Կ�������׃����늵��κ�һ˲�g������һ��������۾�̎�ڔ��_��B����늄әCԓ���@�M�Ǒҿյģ���ԓ���@�M����늉�����ԓ���@�M���a���ķ�늄ݡ��z�y�@һ��늄ݵ��^���c�r�g�������m�����t�����ɵõ������������_�|�l�r�̡�
���Կ�������늄ݙz�y�����P�I�Ƿ�늄��^���c�ęz�y������@���˜ʴ_�ķ�늄��^���c����ô�Ϳ��Կ��Ɵoλ�Â�����BLDcM������Ԕ��ӑՓ��ຯ���ڟoλ�Â�����BLDCM��늄��^���c�z�y�еđ��÷�����
2��ຯ���ڟoλ�Â�����BLDcM��늄��^���c�z�y�еđ���
2��1��ຯ������
��ຯ����һ�N��������������һ�N�Ǿ��Ԕ��֞V��������ȡn�����M�Ɣ�����ݔ�벢�����@Щ���г��F�Δ������ǂ���[5]����ຯ���IJ�����ʾ���飺
ʽ�У�Majority���ຯ����ݔ����^���c߉�\�����V���߉�\�����
2��2��ຯ���ڷ�늄��^���c�z�y�еđ���
���ړ�ຯ���ğoλ�Â�����BLDcM��늄��^���c�z�y�����IJ��E���£�
(1)ͨ�^DsP��ADC�ڌ���늄��M�вɘӣ��ɘ��l��ͬPWM�{���l�ʣ�
(2)���á��c���͡����ɂ�߉�\�������ǰ��늄ӄ���̖�Ġ�B�����������У����c���\����Á�z�y�c��ǰ�Q���B�����ķ�늄���̖��������(xOR)�\����Á�z�y��ǰ��늄���̖���������½��ء�
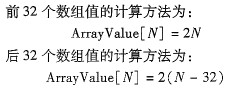
(3)����һ������6�ӱ����ڷ�늄ݸ��N������r�Ĕ��M����С��2����ԓ���M�Ę��췽�����£�
N�ǔ��M���ˣ����Mֵ����һ��ָ���S�r�g׃������һ����̖��B��ָᘡ����x������Ҫ�ӱ��С�1���ij��F�C�����ٴ��ڰٷ�֮50������Ҫ�ӱ��С�0���ij��F�C�����ٴ��ڰٷ�֮50����һ���½��خa���r����ԓ���Mֵ���x�顰1������ʾ߉�yԇ�l���l�����浽�١���׃������������Ҏ�t����1�o���˔��M�Ķ��x��
(4)�V���������ԃ߉�yԇ�l����ֵ������z�y��߉�yԇ�l���l�����浽�١���׃�����V�������^�m�z�y����������߉�yԇ�l��ֵ���������B�m�顰�١��r�����ɴ_�����^��r�̡�
3���Y��
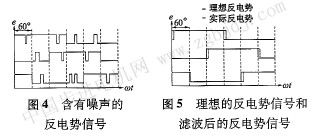
�ڌ��H�����У���늄���̖���ж�N�������^��̖�ɼ����ֵ���^����Ȼ��������Ӱ�[6]�����ң�ԓӰ푸�ؓ�d�Ĵ�С���������Pϵ��ؓ�dԽ�������Խ�ͣ��a��̓���^���c�Ŀ���Խ����BLD-cM l.5��ؓ�d��r�y�õķ�늄���̖��D4��ʾ����һ��60��늽Ƕ����ڃȿ��ܕ��l���״��������½��صĸ�׃����������^��Ҫ��̎����Ȼ���a���e�`���^���c��Ϣ������늄әC�Q��ʴ_��������ʧȥλ����̖�����oͣ�D�����Č���ຯ��������BLDcM�ķ�늄��^���c�z�y����������������늄���̖��Ӱ푣�������ؓ�d�l��������Ӱ푣��@�����_�ķ�늄��^���c���Ķ����CBLDcM���\��ƽ�����ɿ���
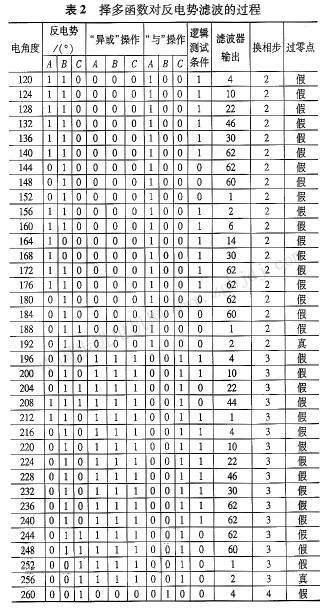
�҂���һ��360��늽Ƕ����ڄ��ֳ������Q�ಽ��ÿ���Q�ಽ��60��늽Ƕȡ���2���Ó�ຯ����120��늽Ƕȵ�260��늽Ƕȅ^�g��늄ݷ�����̖�M�ОV��Ӌ����^�̡�����ƪ����������4��늽Ƕ�����һ���ɘ��g�����ڌ��H�����У������m���pС���ɘ��g�����ɘ��g��ԽС���Д�Y��Խ���_��
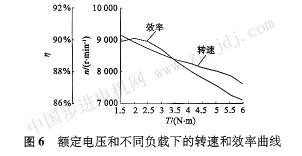
�ı�2�п��Կ��������H�ēQ�ಢ�����l���ھ��_��60��늽Ƕȵ��������r�̣����Ǵ���һ�����ƣ����ƵĴ�С�c�^���c�uֵ���P[7]���ڌ��H���Õr��߀���ȡ�m���Ĵ�ʩ�����M���m���a�������Č��˲���Ԕ���f�����D5������ķ�늄���̖�͞V����ķ�늄���̖���ɈD5���Կ�����ʹ�Ó�ຯ���V��������������������늄���̖��Ӱ푣�ʹ���^���c�z�y�ʴ_�����C�˓Q���r�̵Ĝʴ_�ԡ�
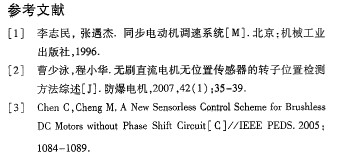
���IJ��Ó�ຯ��������DsP�ğoλ�Â�����BLDcM�M�п��ơ�BLDCM�����飺�~��늉�376 v���~���D��2 N��m���~���D��8 800 r��min���D6�錍�y��BLDCM�ڲ�ͬؓ�d�µĿ����������ĈD�п��Կ�����늄әC���~��ؓ�d�rЧ��****����2��3��ؓ�d��r�£��mȻЧ�������½�����������B��Ȼ�^�ã��C��ʹ�ñ��ĵķ��������ڲ�ͬؓ�d�«@�÷�늄��^���c��̖�������^�õČ����ԡ�
4�Y�Z
����ᘌ��oλ�Â�����BLDcM�ķ�늄��^���c�z�y�M�����о������Ó�ຯ���V����늄���̖�д��ڵ�������������a����̓���^���c���@�����_�ķ�늄��^���c��Ϣ����ɟoλ�Â�����BLDcM�Ĝʴ_�Q�ࡣ���Y���C����ԓ����������2��3��ؓ�d��r�£���Ч�V����늄�̓���^���c�����F�oλ�Â������oˢֱ��늄әC�Ŀɿ���ƽ���\�С�
|