| ���چ�Ƭ�C(j��)�ij���늙C(j��)�o�������о�
��褱������A������
(1�|�ϴ�W(xu��)�����K�Ͼ�201196��2������Ͼ��Ԅ�(d��ng)���ɷ�����˾�����K�Ͼ�2l0003)
ժҪ����B����MsP430��Ƭ�C(j��)������ĵij���늙C(j��)�o������ϵ�y(t��ng)���о�����cc2500����o��ģ�K���\(y��n)��zigBee�f(xi��)�h���b�����ͳ���늙C(j��)������֮�g�����o���B�ӣ����b�����ϵĆ�Ƭ�C(j��)��K��DsP�l(f��)���������DsP��(du��)����늙C(j��)�M(j��n)���(q��)��(d��ng)���ơ��ڴ˻��A(ch��)���M(j��n)���ˌ�(sh��)�(y��n)�(y��n)�C��
�P(gu��n)�I�~������늙C(j��)���o�����ƣ���Ƭ�C(j��)��zigBee
O����
����늙C(j��)�������o(j��)80����d���һ�Nȫ�¸����늙C(j��)������ȫ��ͬ�ڂ��y(t��ng)��늴�늙C(j��)��������(d��)�صĻ����\(y��n)��ԭ���������(d��ng)�w�ĉ���մ�������ʩ�Ӹ��l����늉��������扺�Ч��(y��ng)�a(ch��n)����ʮǧ�յij������(d��ng)�����@�N���(d��ng)ͨ�^���(d��ng)�w�c�Ƅ�(d��ng)�w����Ħ����ϣ�׃�Q���Ƅ�(d��ng)�w�����D(zhu��n)���A���\(y��n)��(d��ng)������늙C(j��)���\(y��n)�ЙC(j��)��Q��������ͻ����(y��u)�c(di��n)�����ٴ��D(zhu��n)�ء��o늴Ÿɔ_����(d��ng)��푑�(y��ng)�졢�oݔ�����i�ȣ���ˣ��ھ��ܿ��Ƶ��I(l��ng)��Ȃ��y(t��ng)늙C(j��)�и���(qi��ng)���m��(y��ng)�ԡ�
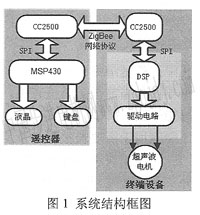
Ŀǰ�ij���늙C(j��)����ϵ�y(t��ng)�������о���(sh��)��(j��)ͨ�ŵĻ��A(ch��)���M(j��n)�еģ��@�ϵ�y(t��ng)�ھ��x�^�̣����ƌ�(du��)���^�ٵ���r��߀�DZ��^��(sh��)�õġ���(d��ng)���ƌ�(du��)������ϰ��ס�����(sh��)���ֱ��^��ĕr(sh��)�o������ϵ�y(t��ng)���Ԍ�(sh��)�r(sh��)��(sh��)�صİl(f��)��������̖(h��o)������о�ϵ�y(t��ng)��������ă�(y��u)Խ�ԡ������n��Piezoelectric Technology��˾�Ĵ����b�����a(ch��n)Ʒ�����Ľ�B��һ�N�Ԇ�Ƭ�C(j��)����Ć�Ԫ�ij���늙C(j��)�o������ϵ�y(t��ng)�����ơ�ԓϵ�y(t��ng)���b�����ͽK�˿������ɲ��ֽM�ɣ��b������MsP430��Ƭ�C(j��)����ģ����dҺ�����I�P���o��ģ�K���Դģ�K���K�˿�������DsP����ģ�ͬ�r(sh��)�����o��ģ�K���(q��)��(d��ng)�·���Դ�·��Ŀ��(bi��o)늙C(j��)��늾��a���ȡ�
1�O(sh��)Ӌ(j��)����
����o������ϵ�y(t��ng)���b���������O(sh��)Ӌ(j��)���ֱֳ�yʽ����Ҫ��������ԭ��1)�����ڲ�����ͬ�r(sh��)���F(xi��n)���z���{(di��o)ԇ��2)�����Ժ����ӹ�(ji��)�c(di��n)��������ƾ��x��3)�̶�ʽ���b������ȫ�������о����ƌ�(sh��)�F(xi��n)�����ñ�yʽ���b���������w�F(xi��n)�o�����ƃ�(y��u)�ݡ�
�b�������Ãɹ�(ji��)��늳ع�늣��ړ����I�P��ͬ�r(sh��)���鷽���������Һ��ģ�K���o��ģ�K���������_(d��)��˾��LsDRF2400A12�������L늳ص�ʹ�É������b�����˵ĺ���Ԫ������TI��˾�ij����Ć�Ƭ�C(j��)MsP430F2232��ͬ�r(sh��)��(du��)Һ�����Դģ�K�����õ��ĵ��O(sh��)Ӌ(j��)˼�롣�K�˿������ĺ���Ԫ����ͬ�Ӂ���TI��TMs320F2810����Ƭ�C(j��)��DsP��ͨ�^SPI�c�o��ģ�K�M(j��n)��ͨ�š�ϵ�y(t��ng)�Y(ji��)��(g��u)��D��Ȧl��ʾ��
�b�����^�֕r(sh��)�g��̎�ڵ��Ġ�B(t��i)����(d��ng)���Iֵݔ��r(sh��)����Ƭ�C(j��)��(hu��)�����ѣ�ͬ�r(sh��)�c(di��n)��Һ��������(j��)Һ�����@ʾ��(n��i)�ݲ����I�P��ݔ�������Ƭ�C(j��)�����Iֵ���������Y(ji��)����ӳ��Һ���ϵ�ͬ�r(sh��)�����Ɵo��ģ�K��K�˿������l(f��)��ָ�ָ�����Ҫ������ַָ��͔�(sh��)��(j��)ָ���ַָ����ָ�K�˵�������ַ����(sh��)��(j��)ָ����ָ��(du��)��(y��ng)Ŀ��(bi��o)�K�ˌ���(sh��)ʩ�Ŀ���ָ�Ŀ��(bi��o)�K���յ�����o��ģ�Kͨ�^s Pl����������DsP��DsP�M(j��n)��̎����(du��)����늙C(j��)��������(y��ng)���ơ�
1 1�b�����O(sh��)Ӌ(j��)
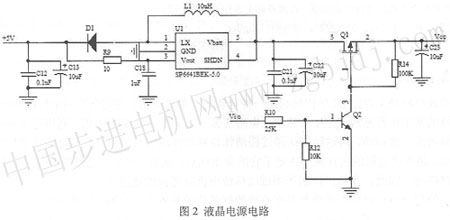
�@ʾ����ʹ��0802Һ��ģ�K���c��Ƭ�C(j��)֮�g����4��ʽ�B�ӣ����I�P�����ṩ��Ҫ��ָʾ��0802Һ���Ĺ��늉���5v����늳�ֻ�ṩ��Ƭ�C(j��)��Ҫ��1. 8��3. 3V����ˣ���Һ�������Ϊ�(d��)���Դ�·��ͬ�r(sh��)���Ϊ�(d��)�Ĺ��Ҳ�ǵ����O(sh��)Ӌ(j��)����횵ġ�Һ������·��D2��ʾ��
�·�У�sP664lBEK-5. 0�@��(g��)Ԫ���Á팍(sh��)�F(xi��n)��3V��늉��D(zhu��n)����Һ��Ҫ���5V���Ԉ�Ч��(y��ng)��Q1�����O��Q2�������·��(sh��)�F(xi��n)Һ���ĵ����O(sh��)Ӌ(j��)����(sh��)�F(xi��n)Һ�����ĵ�ԭ������(d��ng)�b����̎�ڵ�
�Ġ�B(t��i)�r(sh��)Һ��Ϩ�磬���������I���Дʽ���ц�Ƭ�C(j��)��ͬ�r(sh��)��һ��(g��)GPIO����Vi/oݔ��Vcc(�s3v)���Ķ���02��(d��o)ͨ���M(j��n)һ��ʹ01��(d��o)ͨ���˕r(sh��)sP6641BEK-5 0�õ��s��3v��ݔ��늉�(****�ɵ�1. 2v)����K��0802Һ��ݔ��5v�Ĺ���늉�������MSP430�Ķ��r(sh��)�����ܣ���(d��ng)���O(sh��)���r(sh��)�g��(n��i)�]���Iֵݔ��r(sh��)��Һ�������P(gu��n)�]��
�b����������7��(g��)���I�����ê�(d��)��ʽӲ���B�ӷ�ʽ����Ƭ�C(j��)���Дʽ�Д��Iֵ����Ҫ��ܛ��������(sh��)�F(xi��n)ȥ����(d��ng)���ܡ��@�Nܛ��ȥ����(d��ng)������߉���_(d��)ʽ���£�
���У�K����K�_�����Iֵ��K1�dz����x���Iֵ��k2����һ��Kl��ֵ����Ҋ����K�_�����Iֵ���H�c��(d��ng)ǰ�x����ֵ���P(gu��n)��߀�c�^ȥ�_�����Iֵ���P(gu��n)���@�N�����c���y(t��ng)�ļӹ̶��ӕr(sh��)��ȥ����(d��ng)˼��һ�£���Q�˂��y(t��ng)���������M(f��i)Mcu�YԴ�Ć��}���ǵ��ĵ������x��(j��ng)�^׃�����˷���߀�ܑ�(y��ng)������Ҫ�L���I���؏�(f��)���I���I�Pģ�K��
�o��ģ�K�͆�Ƭ�C(j��)ͨ�^sPI�M(j��n)��ͨ�ţ�Ӳ���B�ӳ��˳�Ҏ(gu��)��SIM0��s0MI��cLK��csn֮�⣬�o��ģ�K��߀��GDOO��GD02�@�ɂ�(g��)���_��������Ҫ���ڜyԇ��̖(h��o)ݔ����F(xi��n)IFO��B(t��i)ݔ������(f��)λ�ŵ�ָᘺ͕r(sh��)���̖(h��o)ݔ�����@�ɂ�(g��)���_���B�������ں��ڌ�(du��)zigBee�������ơ�
1 2�������K���O(sh��)Ӌ(j��)
ϵ�y(t��ng)�K����Ҫ���ڳ���늙C(j��)������uMc60��M81�Ļ��A(ch��)�ϣ����ӟo��ģ�K������Ӳ���B�������m��(d��ng)?sh��)ĸ����Է��ϱ�ϵ�y(t��ng)��Ҫ��DsP�ccc2500ͬ�Ӳ���4��sPI�M(j��n)��ͨ�ţ������]�в���DsPĬ�J(r��n)��ʹ�����_sPIsTEA�����Dz���ܛ����ʽ��(j��ng)�^һ��(g��)GPIO�ځ��ṩƬ�x��̖(h��o)���@������Ŀ���DZM���ٵ���ԭ��������Ӳ���B�ӣ�������F(xi��n)����Ҫ���e(cu��)�`�������ھ���ͨ�ų���r(sh��)���茦(du��)ԭ������̫����ġ�
2�o��ͨ�ŵ��O(sh��)Ӌ(j��)
ԓ�o������ϵ�y(t��ng)�����c(di��n)�Džf(xi��)�{(di��o)�����ӹ�(ji��)�c(di��n)֮�g�ĽM�W(w��ng)���������b�����ͽK�˿������ğo���B�ӡ���ZigBee�f(xi��)�h�У������W(w��ng)�j(lu��)�еăɂ�(g��)��ɂ�(g��)���ϵ��O(sh��)���M(j��n)�Д�(sh��)��(j��)��ݔ�r(sh��)���F(xi��n)�_ͻ��������cSMA/cA�f(xi��)�h������������������£�1���l(f��)�͔�(sh��)��(j��)ǰ�ȱO(ji��n) �ŵ���B(t��i)���ڛ]�������O(sh��)��ʹ���ŵ�����r�¾S��һ�Εr(sh��)�g���ٵȴ�һ���S�C(j��)�ĕr(sh��)�g(���O(sh��)�䲻ͬ����)������ŵ���Ȼ���e���Ͱl(f��)�͔�(sh��)��(j��)��2���ڴ_�J(r��n)�ŵ����e�l(f��)�Ͷ�������ն˰l(f��)��һ��(g��)��ݔ��(sh��)��(j��)��Ո(q��ng)��Ո(q��ng)��ͬ���Ō���(sh��)��(j��)�l(f��)�������ն����յ���(sh��)��(j��)���(hu��)�؏�(f��)һ��(g��)AcK��(sh��)��(j��)�������@��(g��)��(sh��)��(j��)���ă�(n��i)�ݳ��F(xi��n)�e(cu��)�`��]�Ѓ�(n��i)���յ��������J(r��n)���@�ΰl(f��)��ʧ������ҪѬ�°l(f��)�͡�
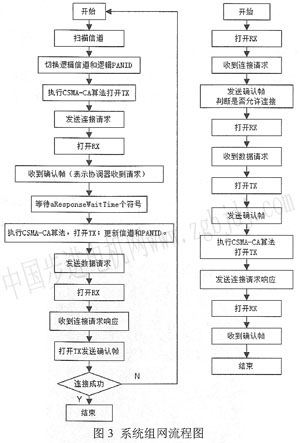
�D3�е���D���҈D�քe�@ʾ���ӹ�(ji��)�c(di��n)�ͅf(xi��)�{(di��o)�������B�ӵĘ�(bi��o)��(zh��n)�������̡��ڽ����B��ǰ���ӹ�(ji��)�c(di��n)���Լ��ГQ��Ŀ��(bi��o)�W(w��ng)�j(lu��)���ڵ��ŵ���PANID�����_Tx��ͬ�r(sh��)�f(xi��)�{(di��o)�����_Rx���ȴ��ӹ�(ji��)�c(di��n)����W(w��ng)Ո(q��ng)�f(xi��)�{(di��o)���յ�Ո(q��ng)���o�ӹ�(ji��)�c(di��n)һ��(g��)�؏�(f��)����ʾ�յ�Ո(q��ng)���ӹ�(ji��)�c(di��n)�յ��؏�(f��)��ȴ�һ�Εr(sh��)�g�����@�Εr(sh��)�g��f(xi��)�{(di��o)���Д��Ƿ�ͬ��ԓ��(ji��)�c(di��n)�ļ��룬�ȴ��Y(ji��)�����ӹ�(ji��)�c(di��n)��f(xi��)�{(di��o)���l(f��)����(sh��)��(j��)
Ո(q��ng)�f(xi��)�{(di��o)������(j��)�Д�Y(ji��)������ͬ����W(w��ng)���t�o��(ji��)�c(di��n)�l(f��)�Ͱ���������ַ���ŵ���PANID�ڃ�(n��i)�ĽM�W(w��ng)��Ϣ������ͬ�⣬�t�؏�(f��)һ��(g��)�ܽ^Ո(q��ng)��Ĕ�(sh��)��(j��)����
�b�����ͽK��֮�g�Ĕ�(sh��)��(j��)�Ԏ�����ʽ�M(j��n)�Ђ�ݔ�����Ɏ��^����Ч�d�ɺ�У�(y��n)�a�����ֽM�ɡ����^�����ˎ�������Ϣ��Ŀ��(bi��o)�O(sh��)���Դ�O(sh��)��ĵ�ַ��PANID����Ч�d�ɼ��҂�Ҫ��ݔ?sh��)ă?n��i)�ݣ�У�(y��n)�a�Á��(y��n)�C��(sh��)��(j��)�����Ƿ����_�l(f��)�͡�
3�Y(ji��)�Z
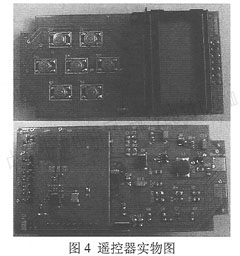
����(j��)���Ϸ���������b���������ƣ���D4��ʾ��������ϼ��d�˟o��ģ�K�ij���늙C(j��)������(uMc60һM81)�ͳ���늙C(j��)�M(j��n)���ˌ�(sh��)�(y��n)����(sh��)�(y��n)�Y(ji��)�����������ȴ_���˟o��ͨ�ŵĿɿ��Ժͷ�(w��n)���ԣ�Ҳ����늙C(j��)�ă�(y��u)Խ���ܵõ��˸���ֵ��w�F(xi��n)��ԓ�o������ϵ�y(t��ng)�����ƞ鳬��늙C(j��)�_��δ���l(f��)չ��·�����˻��A(ch��)��
|