| 1 mm����������늙C(j��)����ģ�B(t��i)����
��������ꐕ�(hu��)��(gu��)
(�����I���I(y��)��W(xu��)�������������I150001)
ժҪ����(du��)�������D(zhu��n)��(sh��)�Ľ���������늙C(j��)�Ķ����M(j��n)����Փ�͌�(sh��)�(y��n)�о����ҳ���Ӱ�늙C(j��)�������(d��ng)ģ�B(t��i)��
��Ҫ���أ�������O(sh��)Ӌ(j��)ԭ�t������������(g��)����ֱ��lmm����늙C(j��)���������L(zh��ng)�Ȟ�22ram���乤���l��23kHz��
�ڼ���(l��)늉���һ��ֵ��220V�r(sh��)����****���D(zhu��n)���؞�12��N(y��n)��m�����d�D(zhu��n)�ٞ�1500r��min�����y(c��)ԇ��ԓ늙C(j��)�Ŀ��d���ԡ�
�P(gu��n)�I�~����(sh��)����ʽ����늙C(j��)���������(d��ng)ģ�B(t��i)��Ӱ�����
0����
����늙C(j��)��20���o(j��)80����ԁ�(l��i)�l(f��)չ����(l��i)�������(q��)��(d��ng)�����乤��ԭ�����ɉ���մ��ڏ����w�ı��漤�l(f��)���E�A�\(y��n)��(d��ng)���������Ӻ��D(zhu��n)��֮�g��Ħ�����Ƅ�(d��ng)���ڏ����w������\(y��n)��(d��ng)�w�\(y��n)��(d��ng)��
�����������ͨ늴�늙C(j��)���](m��i)�еĵ��ٴ��D(zhu��n)�ء���(d��ng)�B(t��i)푑�(y��ng)�졢�o(w��)늴Ÿɔ_���T��С���������Ժá���λ���ȸߡ������p���Y(ji��)��(g��u)��(ji��n)�ε�ͻ�����c(di��n)������ڹ��I(y��)���ơ����܃x���x�������պ��졢��܇������������ܙC(j��)���˵��I(l��ng)���������V���đ�(y��ng)��ǰ��������늙C(j��)߀��ֱ���(q��)��(d��ng)ؓ(f��)�d��������ʹ���X݆׃�ٶ��a(ch��n)�������(d��ng)�������g϶�Լ���Ч�ʡ��y�ڿ��Ƶ�һϵ�І�(w��n)�}��
����늙C(j��)��һ�Nȫ�µ��Ԅ�(d��ng)���ƈ�(zh��)�к��(q��)��(d��ng)Ԫ����Ҳ��һ�N���µĂ���(d��ng)��ʽ���nj�(du��)���y(t��ng)늴��(q��)��(d��ng)ԭ����ͻ�ƺ��������a(b��)�䡣��ʮ���o(j��)ĩ���ԁ�(l��i)������늙C(j��)���g(sh��)�õ���Ѹ�ٰl(f��)չ���ձ�������(gu��)����(gu��)���¼��¡�Ӣ��(gu��)���n��(gu��)������������m����ʿ�ȇ�(gu��)���S���W(xu��)�Ϳ��ЙC(j��)��(g��u)���������о����_(k��i)�l(f��)����늙C(j��)���g(sh��)�����У��ձ�������(gu��)̎������****��λ�������(l��i)���҇�(gu��)���@����Ҳȡ�����L(zh��ng)���M(j��n)չ���ڿ����A(y��)Ҋ(ji��n)��δ��(l��i)������늙C(j��)����ȫ���緶����(n��i)�@�ÏV���đ�(y��ng)�ã���������ȡ�����y(t��ng)����С��늴�늙C(j��)��ʹ�˂������a(ch��n)������������.����늙C(j��)�����������кܶ�N����������������(d��ng)ģ�B(t��i)��ͬ�֞飺�в��ͳ���늙C(j��)���v���ͳ���늙C(j��)���в��v������ͳ���늙C(j��)����늙C(j��)�������Π��c�Y(ji��)��(g��u)���Է֞飺�A�P(p��n)��A�h(hu��n)��늙C(j��)������늙C(j��)��ƽ��늙C(j��)��������ݔ����ʽ�֞飺���D(zhu��n)��늙C(j��)��ֱ���Ƅ�(d��ng)��늙C(j��)�ȡ������еij���늙C(j��)���������D(zhu��n)����늙C(j��)���J(r��n)���������ͻ�������(x��)�L(zh��ng)���ij���늙C(j��)��ͬ�r(sh��)�������Ƃ乤ˇ����(du��)��(ji��n)�Σ�Ҳ��������(sh��)�F(xi��n)�a(ch��n)�I(y��)���ij���늙C(j��)��
��ʽ����늙C(j��)�����ӻ��w���ϺͽY(ji��)��(g��u)�IJ�ͬ�ֿ��Ժ�(ji��n)�εČ��������£�
���Љ��Ƭ�A��ʽ����늹�ʽ�͉����ʽ����늙C(j��)���F(xi��n)�ı��^�磬���Զ����䪚(d��)�ص����c(di��n)��Ҳ������ijЩ�I(l��ng)���_(k��i)ʼ��(y��ng)�ã���Ҫ���M(j��n)һ����(sh��)�F(xi��n)�ͻ��ͮa(ch��n)�I(y��)���ڹ�ˇ�϶����y�Կ˷������y�Ͳ���֮̎��
�����о��ˌ�(sh��)�Ľ������������D(zhu��n)����늙C(j��)�����Ķ�������һ��(g��)ճ�N���Ƭ���Π���A�뷽�εĽ������M�ɣ����нY(ji��)��(g��u)��(ji��n)�Σ������ͻ��ă�(y��u)�c(di��n)����������Ԫܛ����(du��)�����M(j��n)�з������ҳ���Ӱ�늙C(j��)�������(d��ng)ģ�B(t��i)����Ҫ���أ��ó���һЩ��(du��)�����O(sh��)Ӌ(j��)�Ѕ����r(ji��)ֵ�Ĕ�(sh��)��(j��)�����������_(t��i)����ֱ��lmm����늙C(j��)���������y(c��)ԇ������d���ԡ�
1����������늙C(j��)�ĽY(ji��)��(g��u)��ԭ��
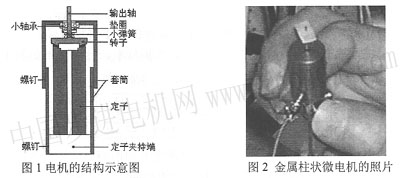
��Փ�����о��Ľ���������늙C(j��)����Ҫ�ɶ��ӡ�ݔ�����ص��D(zhu��n)���Լ��o�D(zhu��n)�ӼӉ����A(y��)�����C(j��)��(g��u)�ͷ��b�⚤�M�ɣ���D��ʾ���D1��늙C(j��)�Y(ji��)��(g��u)ʾ��D���D2��M�b�õ�늙C(j��)�әC(j��)��Ƭ������b�⚤�ijߴ���^���ǿ��]���M�b���{(di��o)ԇ�ķ��㣬�䌍(sh��)�������ķdz�С��
ԓ�Y(ji��)��(g��u)����Ҫ���c(di��n)������(g��)�(q��)��(d��ng)�C(j��)��(g��u)����һ��(g��)�����������棬����Ͳͨ�^(gu��)�S�С����ķ���ϩ�|Ȧ�oС�����ṩ�A(y��)�o��������Ͳ���S֮�gͨ�^(gu��)С�S���B�ӡ��D(zhu��n)�����ڶ���֮�ϣ���늙C(j��)�Ą�(d��ng)��ݔ�����֡����ӵ��¶�ֱ���Դ��һ�ν������������ĊA�ֶˣ�ͨ�^(gu��)�@һ���̶ֺ��b�����B��
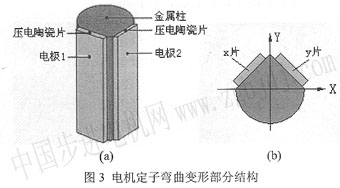
��������늙C(j��)���ӽY(ji��)��(g��u)��D3��ʾ���ژ�(g��u)�ɶ��ӵĽ������Ă�(c��)��ӹ����ɂ�(g��)���ֱ��ƽ�棬����ƽ�����N�σɂ�(g��)����늘O�ľ��Ή��Ƭ������մ�Ƭ���ÙM��(ch��ng)���(d��ng)ģʽ��PzT-4����մ��L(zh��ng)��Ƭ�����Ƭ�ڽ�׃늉��ļ���(l��)��(hu��)�a(ch��n)���L(zh��ng)�ȷ����ϵ���s�\(y��n)��(d��ng)����(d��ng)���Ƭ�ܵ���׃늉����îa(ch��n)����s���(d��ng)�r(sh��)���͕�(hu��)����(d��ng)����ճ����һ��Ľ��������������(d��ng)��
�����˸��M(j��n)Ħ�����|�����g�ĉ������Ѷ��Ӷ���ӹ����F�Σ��Ķ������˽��|�����������ˣ����|��r����D3b��ʾ����(d��ng)�Խӽ������l�ʵĽ�׃늉�����(l��)xƬ�r(sh��)�����ӕ�(hu��)��x�����ϼ��l(f��)���������(d��ng)����(d��ng)ͬ�Ӽ���(l��)yƬ�r(sh��)�����ӕ�(hu��)��Y�����ϼ��l(f��)���������(d��ng)�������@�ɂ�(g��)���g�͕r(sh��)�g�϶����90o�ď������(d��ng)�����Ժϳɶ��ӵď����u�^�\(y��n)��(d��ng)���˕r(sh��)���Ӷ���߅���|(zh��)�c(di��n)���E�A�\(y��n)��(d��ng)��
���ӵ����(d��ng)ģ�B(t��i)��(du��)����늙C(j��)��������ҪӰ푣���ˣ���횸������Щ���ؕ�(hu��)Ӱ푶��ӵ�ģ�B(t��i)�������о��˶��ӵ��L(zh��ng)�ȡ��̶��A�ַ�ʽ�̓�ƽ��A�ǵȌ�(du��)���ӵ����(d��ng)ģ�B(t��i)��Ӱ푡�
2늙C(j��)����ģ�B(t��i)����
늙C(j��)�O(sh��)Ӌ(j��)���P(gu��n)�I�Ƕ����O(sh��)Ӌ(j��)����(du��)��Ҫ����ʹ�����܉��ڳ��l��(n��i)�������(d��ng)�����������D(zhu��n)�QЧ���ֲ���̫�͡������҂���Ҫ������(g��)���挦(du��)Ӱ푶������(d��ng)ģ�B(t��i)�Č����M(j��n)���о���
2 1�L(zh��ng)�Ȍ�(du��)�������(d��ng)ģ�B(t��i)��Ӱ�
�L(zh��ng)�Ȍ�(du��)�������(d��ng)ģ�B(t��i)��Ӱ���Ҫ���F(xi��n)�ڌ�(du��)���(d��ng)�l�ʵ�Ӱ��ϣ�늙C(j��)�����L(zh��ng)�����^(gu��)��r(sh��)�����Ĺ����l�ʾ͕�(hu��)�ܵͣ���֮���͕�(hu��)�ܸߡ�����(d��ng)���ӵĹ����l�ʵ���20 kHz�r(sh��)��늙C(j��)�����ڷdz��l��(n��i)������(hu��)�a(ch��n)����������(d��ng)���ӵĹ����l�ʸ���100kHz�r(sh��)������(hu��)��������D(zhu��n)�Q�ĸ��l�p�ģ�����늙C(j��)Ч�ʣ����ӿ����y�ȡ����ԣ����˽�����������(ji��)ʡ�����Ϳ����ϵķ��㣬�҂�һ���x��늙C(j��)�����l����20��100 kHz֮�g��
ͨ�^(gu��)��(du��)ֱ����1mm����ƽ��A�Ǟ�90o����ͬ�L(zh��ng)�ȵĶ����M(j��n)�н�ģ����������ANsYs����Ԫ����ܛ����(du��)���M(j��n)��ģ�B(t��i)�������õ��������Ķ��A�����l�ʣ�Ӌ(j��)��Y(ji��)�����1��ʾ��
�ı��п��Կ������S�������L(zh��ng)�ȣ������ӣ����Ӄɂ�(g��)����Ĺ��Џ����l��f2x��f2y���pС����(d��ng)�L(zh��ng)�Ȟ�12 mm�r(sh��)��f2x��f2y���^�ӽ����ɴˣ��҂������Ɣ࣬��(d��ng)���@�ɂ�(g��)�l��֮�g����һ�l�ʁ�(l��i)����(l��)���ӕr(sh��)����(hu��)�a(ch��n)���ɂ�(g��)���ֱ�ď���ģ�B(t��i)���Ķ�ʹ���Ӯa(ch��n)�������u�^�\(y��n)��(d��ng)���@���f(shu��)���˶����ڽY(ji��)��(g��u)�ߴ����Ǻ����ġ�
2 2�̶���ʽ��(du��)�������(d��ng)ģ�B(t��i)��Ӱ�
��늙C(j��)������(g��)�Y(ji��)��(g��u)�У���(du��)���Ӱ��b�̶��Ƿdz���Ҫ�ģ����@��(sh��)�ؕ�(hu��)Ӱ푵��������(d��ng)ģ�B(t��i)�����ͺ����l�ʣ��̶���ʽ��(du��)늙C(j��)���ӵ�ģ�B(t��i)Ҳ�кܴ��Ӱ푣������Ҍ����팍(sh��)�õĶ���ģ�B(t��i)���҂���(du��)���N�̶���ʽ�M(j��n)���ˇLԇ���D4��늙C(j��)����ͬ����ʽʾ��D��
�ڷ����^(gu��)���У��҂��x���˃ɷN������һ�����Ă�(g��)����o�̣���׃�Q�S�������λ�á������ڃɂ�(g��)����o�̣�׃�Q�S�������λ�ã����xȡ���^���������ͺ��l�ʡ�
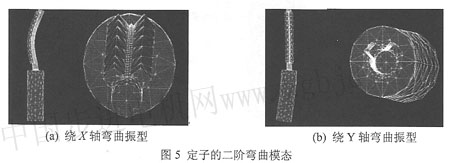
�D5���҂���Ӌ(j��)��Y(ji��)�����ĈD�п��Կ����������Ѓɂ�(g��)�ڿ��g�����ֱ�Ķ��A�������ͣ��@X�S�Ķ��A�������ͺ��@Y�S�Ķ��A�������ͣ����l�ʷքe˦fx��fy��ʾ���L(zh��ng)�Ȟ�12 mm��ֱ����l mm�Ķ��ӵĶ��A���������l��fx=2l. 315 kHz��fy=21. 828 kHz�����Կ������ӵ��@�ɂ�(g��)���ֱ�Ķ��A���������l�ʱ��^�ӽ�����(d��ng)���@�ɂ�(g��)�l��֮�g����һ�l�ʁ�(l��i)����(l��)���ӕr(sh��)����(hu��)����(l��)���@�ɂ�(g��)���ֱ�ď���ģ�B(t��i)���Ķ�ʹ���Ӯa(ch��n)������Ҫ�ď����u�^�\(y��n)��(d��ng)���@�f(shu��)����Փ�������õ�늙C(j��)���ӹ̶���ʽ�Ǻ����ͷ��ό�(sh��)�H�ġ�
ͨ�^(gu��)������늙C(j��)�әC(j��)�ĽM�b���{(di��o)ԇ���ó����ɂ�(g��)�Y(ji��)Փ��
(1)�̶�λ���m���ڶ��ӹ̶�����1��3���ϣ���t��(hu��)�����ӏ���׃�β��ֽY(ji��)�c(di��n)���ƣ��p�����ӵ���������ҳ��F(xi��n)ƫ��F(xi��n)�����(d��ng)�����x�S��y�S���Ǵ�ֱ�Ķ���(hu��)���F(xi��n)һ��(g��)�A�ǡ�
(2)���m���Ãɂ�(g��)����̶�����?y��n)��@�N��r�¿��ܳ��F(xi��n)�ɂ�(g��)���ֱ��ģ�B(t��i)�乲���l��֮�g��e�^�Ķ����ӿ��ƺ��{(di��o)ԇ���y�ȡ�
2 3��ƽ��A�nj�(du��)�������(d��ng)ģ�B(t��i)��Ӱ�
���������ăɂ�(g��)ƽ���ڌ�(sh��)�H�ӹ��У�С�ɱ���ĕ�(hu��)���ڼӹ����ȵĆ�(w��n)�}�����F(xi��n)�ɂ�(g��)ƽ�治��ȫ��ֱ����r�������(l��i)����һ�®�(d��ng)�@��Փ�����ֱ�ă�ƽ�憖(w��n)�ĊA�Ǵ�С��׃�r(sh��)����(du��)�����ͺ��Џ����l�ʵ�׃�����҂�?n��i)�Ȼ�x���ӵ�ֱ��D=1mm���L(zh��ng)�� l��=12mm��Ӌ(j��)��Y(ji��)�����2��ʾ��
�ı��п��Կ������S���ɂ�(c��)ƽ��ĊA�Ǧյ��������l��f2x��f2y���������څ��(sh��)�����ǃɂ�(g��)�����ϵ��l��f2x��f2y�ڦ�=90o�r(sh��)��ӽ���ͬ�r(sh��)�ڶ��ӵ���������߀�l(f��)�F(xi��n)����ƽ�治���ֱ�r(sh��)���ɂ�(g��)���A�������ͷ����ٴ�ֱ�c��(du��)�Q�S�ķ����@�Ӷ��Ӷ����|(zh��)�c(di��n)�ęE�A�\(y��n)��(d��ng)܉�EҲ��(hu��)��һ�£����D(zhu��n)���g�������D(zhu��n)�QЧ�ʌ���(hu��)�½���Ӱ�늙C(j��)��ݔ������
3늙C(j��)�әC(j��)������
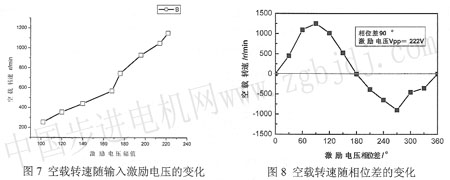
�����˘әC(j��)���y(c��)ԇ�˶���ֱ����1mm늙C(j��)�Ļ���ݔ�����ԡ������l��һ�D(zhu��n)�����ԡ�늉��D(zhu��n)�����ԡ���λ��һ�D(zhu��n)�����ԡ�
3 1�D(zhu��n)���S�l�ʵ�׃��
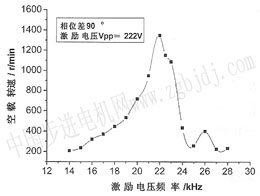
�ڼ���(l��)늉��ķ�-��ֵVp-p=222 v �£������y(c��)ԇ���ڃ�·����(l��)늉�����λ��՞�90o�r(sh��)�����d�D(zhu��n)�٢��S�l�ʵ�׃������D6��ʾ��
�ĈD�п��Կ�������(d��ng)����(l��)늉����l��f��14��28 kHz֮�g�r(sh��)��늙C(j��)��(hu��)�D(zhu��n)��(d��ng)�������S���l�ʵ����ӣ�늙C(j��)���D(zhu��n)�������Ӻ͡����F(xi��n)�@�N�F(xi��n)���ԭ������?y��n)�?du��)��һ��(g��)���(d��ng)ϵ�y(t��ng)��ռ����(d��ng)����(l��)�l�ʰl(f��)��׃���r(sh��)���������(d��ng)��B(t��i)Ҳ��(hu��)�l(f��)��׃������Ȼ��(d��o)��ݔ�����l(f��)��׃������(d��ng)����(l��)
�l�ʽӽ��C���l�ʕr(sh��)�����(d��ng)��(hu��)��u����(qi��ng)����(d��ng)�l���h(yu��n)�x����l�ʕr(sh��)�����(d��ng)��(hu��)��u�p�������ԈD�Е�(hu��)���F(xi��n)һ��(g��)�O��ֵ��
3 2�D(zhu��n)���S늉���׃��
�D7�����l��,f=22 kHz�r(sh��)���y(c��)�õ���λ���=90o�r(sh��)��늙C(j��)�Ŀ��d�D(zhu��n)�٢��S����(l��)늉�V��׃���������ĈD�п��Կ���������λ���=90o�r(sh��)���D(zhu��n)�ٶ��S��ݔ��늉�����������ߡ����F(xi��n)�@�N�F(xi��n)���ԭ���ǣ�늙C(j��)�Ķ��������É���մ�Ƭ��(l��i)��(sh��)�F(xi��n)�����D(zhu��n)�Q�ģ��ɉ���մɵĉ�����ܿ�֪����(d��ng)���늈�(ch��ng)��늉�����r(sh��)����v����׃Ҳ��(hu��)���Ķ���(d��o)������(g��)�������(d��ng)�����Ҳ�S֮�������(d��ng)�����������������푑�(y��ng)����(d��o)�¶���߅���|(zh��)�c(di��n)�E�A�\(y��n)��(d��ng)��܉�EҲ�S���U(ku��)�����ԕ�(hu��)ʹ늙C(j��)���D(zhu��n)���S���늉�����������ߡ�
3 3�D(zhu��n)���S��λ���׃��
�D8���ڹ����l��f=22 kHz��늉�Vp-p=220V�£��y(c��)�õ�늙C(j��)���d�D(zhu��n)�٢��S����λ��յĸ�׃��׃����������
�ĈD�п��Կ���늙C(j��)�ڦ�=90o���ҕr(sh��)��형r(sh��)�?l��)����D(zhu��n)��N�_(d��)���O��ֵ����늙C(j��)�ڦ�=270o
���ҕr(sh��)����r(sh��)�?l��)�����D(zhu��n)��N�_(d��)����һ��(g��)�O��ֵ����(d��ng)��=0o�ͦ�=180o���ҕr(sh��)��늙C(j��)���D(zhu��n)��N���㡣
����Փ�ρ�(l��i)�v����(d��ng)����(l��)늉���λ���0o����360o��׃�r(sh��)���D(zhu��n)�وD��(y��ng)ԓ��������Ҏ(gu��)�ɣ����Dʾ�s���F(xi��n)��ƫ����F(xi��n)�@�Nƫ���ԭ����ܞ飺늙C(j��)���ӵăɂ�(g��)ƽ���ڼӹ��r(sh��)�������`���ƽ�沢�����ֱ���������w�Y(ji��)��(g��u)�P(gu��n)�ڌ�(du��)�Q�SҲ����ȫ��(du��)�Q�����Զ����ڃɂ�(g��)�����ϵď������(d��ng)������ֱ������Ҳ��ͬ�ͣ�ʹ���Ӷ����|(zh��)�c(di��n)�E�A�\(y��n)��(d��ng)܉�E����ȫһ�£������D(zhu��n)�وD��ƫ�x����Փֵ��
4�Y(ji��)Փ
ᘌ�(du��)늙C(j��)�������(d��ng)ģ�B(t��i)��Ӱ������M(j��n)������Փ����(sh��)�(y��n)�о����ҳ�������(g��)�SҪ�����P(gu��n)���ص�Ӱ���Y(ji��)�����ó��ˌ�(du��)�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)���{(di��o)ԇ��ָ��(d��o)���x�ĽY(ji��)Փ��������l�_(t��i)����ֱ��lmm����늙C(j��)��ԓ늙C(j��)�Ķ���錍(sh��)�Ľ��وA���w���@�N늙C(j��)�ȉ����늙C(j��)�и�Ȯ�ă�(y��u)�c(di��n)������ɱ��ͣ��Y(ji��)��(g��u)��(ji��n)�Σ��������ķdz�С���m���ͻ��ͮa(ch��n)�I(y��)�����ڹ����l��f=22 kHz������(l��)늉�Vp-p=220 v�l���£��y(c��)ԇ��ԓ늙C(j��)�Ķ��D(zhu��n)���ؼs��T(m��n)0=12 uN��m�����d�D(zhu��n)��N=1500 r��min���ҡ�
�����īI(xi��n)
[1]�����\(ch��ng)����������늳�늙C(j��)���о�����c��2001��23(4)��279-282
[2]��ȫ�������P�����FӢ���ȏ������D(zhu��n)��늙C(j��)���|�����F�νǵķ����c��(sh��)�(y��n)�W(xu��)�W(xu��)��(b��o)��2002��27(5)��413��419 |