���˙C���˵ķֲ�ʽ����ϵ�y�OӋ
����K����
�Ϻ���ͨ��W�Ԅӻ�ϵ���Ϻ�200240)
ժ Ҫ��ᘌ����˙C����ϵ�y���ɶȶ࣬���r���c�ɿ���Ҫ��ߵ����c���OӋ�˻���
CAN�����ľ���windows�cRT-Linuxϵ�y���p���C�����،ӽY���ķֲ�ʽ����ϵ�y����������ϵ�y���ü��й�����ɢ���Ƶķ�ʽ�����տ���ϵ�y�ĽY�����܄��֞����،ӡ�ͨ�Ōӡ��f�{���Ќ�3�ӡ�CAN�����cһ��ͨ�ſ�����ȣ����Ĕ���ͨ�ž����^���Č��r�ԣ�����CAN�����B�����Σ�������ϵ�y�B���ď��s�̶ȣ�������ϵ�y�Ŀɿ��ԣ����л���Windows�Ŀ���ϵ�yؓ؟���˙C�����P��늙C���{ԇ�Լ����Д������@ʾ������RT-Linux��ϵ�y���F�C���˵Č��r�\�ӿ���һ����������ķֲ�ʽ����ϵ�y�������㡢��ȫ�ɿ������r�ԏ����ܳ�֝M����˙C����ϵ�y�{ԇ�c�\�ӿ��Ƶ�Ҫ��
�P�I�~�����˙C���ˣ��ֲ�ʽ���ƣ��p���C���I�r��
�ЈD���̖��TP 27 �īI���R�a��A
Distributed Control System Design for Humanoid Robots
YANGBin��SU Jian-bo
(Automalion Department��Shanghai Jiao Tong University��Shan��ai 200240��China)
Abstract��A humanoid robot contr01 system with distnbuted modularization is presented based on CAN bus a nd double PC control archi-tecture��tomeetthe requirements ofmuhi-degree-offreedom��real-time a nd stability pelrformanee Based onthe principle of centralizedmanagement a nd decentralized control��the control system is divided into three layers��main control layer��communication layer a nd actuating layer��CAN bus is a kind of field bus with better real-time performanee a nd stronger reliability��The main control layer system is based on Windows OS��responsible for testing a nd display of the sensor data received The other one is under RT-Linux 0S��aiming at realizing hulnanoid robot real tilne motion control Experilnental results show that the presented control s3 stem has good perfommnce of convenient operation��stability a nd real-time��meeting the requiremenls of humanoid robot testing a nd motion control
Key words��humanoid robot��distributed control��double PC��reaI-time
1�� ��
����������˙C�����ѳɞ�C�����I���о��ğ��c�����˙C���˾���������͙C���˟o���ȔM�ă��ݣ�������������ճ���������h���У��f�������ɾ��w���΄�[1]��Ȼ�����˙C��������һ�����s�Ķ����ɶ�ϵ�y����Ҫ��Ч����������������Ϣ����֪���h����������B׃�����������\�ӈ��ЙC���M���{�������Ҫ�������ϵ�y��Ҫ�кܸߵĿɿ��Ժ͌��r�ԡ�
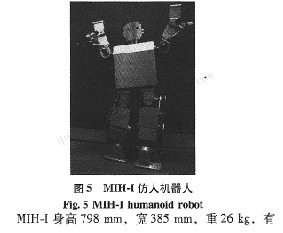
����ᘌ����˙C���˵����c����ϵ�y�ɿ��ԣ������ԣ����r���Լ����w���ܵă����ȶ����l���OӋ�˻���CAN�����f�h��ϵ�y�����Լ�Windows��RT-Linux�pϵ�y�ķ��˙C�������،ӽY���ķֲ�ʽ����ϵ�y���������OӋ��ϵ�y��MIH-I(Mini Intelligent Humanoid robot-I)���˙C����ƽ�_���M���ˌ��Y��������ԓ�OӋ����ϵ�y�{ԇ���㣬�ɺܺõؿ��Ʒ��˙C���˵ĸ���늙C�f�{���������C���˙C�����\�ӵķ����Ժ͌��r�ԡ�
2����CAN�����ķֲ�ʽ����ϵ�y
�������õļ���ʽ����ϵ�y�����ƹ��ܸ߶ȼ��У������^��Ĕ�����ݔ�ٶȺ;��ȣ����ֲ��Ĺ��ϾͿ������ϵ�y�����wʧЧ�������ڂ��y�ļ���ʽ�Ŀ���ϵ�y���ֲ�ʽ����ϵ�y���и߿ɿ��ԣ����ھS�o���_���Ժ��`���Ե����c�����ܝM����˙C�����\�ӿ��Ƶ�Ҫ����ˣ��n����KHR-[2]��������Guroo[3]�����Mϵ�y���Dz����˻���CAN(Controller Area Network)�����ķֲ�ʽ���wϵ�Y����ԓ�Y�����Ժ����C���˿���ϵ�y�IJ����������ϵ�y�ĿɔUչ�ԡ�CAN�����ڹ��I�I���еõ��V�����ã����гɱ��͡��ɿ��Ըߡ��Y�����κ��_
���Ժõ����c���m�ڷ��˙C���˵Ŀ���ϵ�y[4]��
���ȵęC���˿���ϵ�y���OӋ�У��^��ʹ�õ���windows��DOS�ȷ֕r����ϵ�y���@�N����ϵ�y��ϵ�y���wƽ�����ܵă��������������Ѻã�ϵ�y���죬�����_�l�{ԇ�����s�o�����C�ض����΄������ĕr�g�ȵõ�푑���Ҳ�����ܝM��ߌ��r�Ե�Ҫ�Ķ��o�����C���P���Č��r�f�{�\�ӡ���ˣ����ڷ��˙C���˵ķ������ߣ����r����ϵ�y�Dz��ɻ�ȱ��[5]��
Ŀǰ���S���C���˶����Ì��r����ϵ�y�M���\�ӿ��ƣ����ձ���ASIMO[6]������Johnnie[7]�ȡ�Ȼ�������r����ϵ�y���ڙC���˶�ý�w����֧���^����̷������Ñ����治�Ѻã���������˷��˙C����ϵ�y���w�{ԇ���y��[5]��
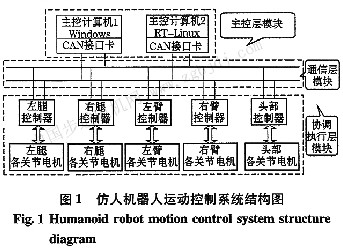
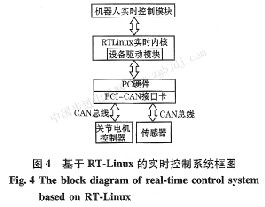
���ڴˣ����û���cAN�����ķֲ�ʽ����ϵ�y����������ϵ�y���ü��й�����ɢ���Ƶķ�ʽ�����տ���ϵ�y�ĽY�����܄��֞����،ӡ�ͨ�Ōӡ��f�{���Ќ�[8]3�ӡ����У����،��əC���˱��w��Ĺ���վ�M�ɣ������p����ϵ�y�ĽY�����ȱ�����windows����ϵ�y�ă��c���֝M���˙C�����\�ӵķ����Ժ͌��r�Ե�Ҫ���F�˙C�������΄�Ҏ���Լ���ָ������ɵȹ��ܣ��f�{���ЌӶ������ڙC���˱��w�ϣ���ɾ��w��늙C�ӣ������Լ���̖�ɼ����΄գ�ͨ�Ō�ؓ؟���،��c�f�{���Ќӵ���Ϣ�������Y����Dl��ʾ��
1)���،�ģ�K ���،Ӯa���C�����P���\�����У��f�{�����P�����ָ���Ą��������،Ӱ���2�_����Ӌ��C��һ�_�����ڌ��rϵ�y(RT-Llnux)�£����rϵ�y���пɿ��ķ����Ժ͌��r��������ԓ����Ӌ��C��Ҫ��əC���˵IJ��BҎ���c���߿��ƣ���һ�_������Windowsϵ�y�£�������Win��dows���ܸ�ֱ�^���@ʾ�����P��늙C�Ĺ�����r�����ڶ�ý�w������Ϣ��֧�ָ��ã���˷����M�ЙC�����P��늙C���{ԇ��늙C�l����̖�ęz�飬������Ϣ�ī@���Լ�����������r�ľo��̎����2�_����Ӌ��C�ȿ���ͬ�r�������ƙC���˵��\�ӣ�Ҳ���������������
2)ͨ��ģ�Kͨ�Ō���Ҫؓ؟���،Ӻ͈��Ќ�֮�g��Ϣ�Ă�ݔ������Ӌ��C�c늙C������֮�gͨ�^CAN�����M��ͨ�š�CAN�����cһ��ͨ�ſ�����ȣ����Ĕ���ͨ�ž����^���Ŀɿ��ԡ����r�Ժ��`���ԣ��Y�����Σ���2�������ɿ������O����ڿ����ϣ��������O�䔵�����S�ķ����ȿ����������ӻ�p���O�䣻�܌��e�`�ā�Դ�M�����_��λ���ṩ�������e�`̎�����ܣ����C��ͨ�ŵĿɿ��ԣ�ͨӍ���ʸߣ���40 m�ķ����ȿ����_��l Mbps�����ʣ����ö̎��Y������ݔ�r�g�̣����C��ͨӍ�Č��r�ԣ��ɱ��ͣ�������Ҫ�ߡ���·���L�Ĉ�
�ϣ���ͨ���p�g���Ϳ��ԝM����Ҫ��ͬ�r����CAN����ֻ��2�����M��ͨ�ţ������ϵ�y�B���ď��s�̶ȣ�ͬ�r������ϵ�y�Ŀɿ�����[2]��
�b������CAN�����ă��c���x�����˙C���˷ֲ�ʽ����ϵ�y��ͨ��ý�顣���w�B�ӷ�ʽ�飺����Ӌ��Cͨ�^CAN�����ӿڿ��B�ӵ������ϣ����\�ӿ�����Ҳ��ͨ�^�����հl����ӵ������ϣ����ҿ��Ը������H��r���p��Ŀ��
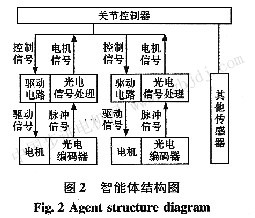
3)�f�{���Ќ�ģ�K�f�{���Ќ���Ҫؓ؟�C�����P���ŷ����ƣ�������ߙC���˵Č��r�Ժͷ����ԣ���������ɂ������w�팍�F�f�{�ӵĹ���[9]�����������w֮�g�Ǫ����ģ�ÿ�������w��1���P�������������ɂ��P�������������Ă��������ɡ�һ���棬�����wͨ�^�P���������������،Ӱl�͵��P���\�����У����P��늙C�M���ŷ����ƣ���һ���棬�����w���Ղ�������Ϣ���fͬ���،�ֱ��̎�����˙C���˵Į�����r[9]�������w�ĽM�ɽY������D2��ʾ��
���������w�ķӿ���ϵ�yͨ�^��ְl�]����������ߙC���˿���ϵ�y�ķ����Ժ͌��r�ԡ�
3���،�ģ�K�OӋ
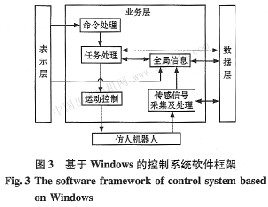
1)����windows�Ŀ���ϵ�y�OӋ����windows������Ӌ��C����ϵ�y�ɸ����书�ܣ�������ܛ��ϵ�y�֞��ʾ�ӡ������ӡ��I�Ռ�[10]�������ϵ�yܛ����ܣ���D3��ʾ��
�ٱ�ʾ��������˙C�����˙C�������棬�Ñ������O��ϵ�y�������\��ģʽ�����r�O�y���˙C���ˮ�ǰ�Ġ�B���ṩ�h����Ϣ�ĄӑB�@ʾ���ܡ�
�ڔ�����ؓ؟������O�ø��N�����ͭh����Ϣ���������������������BҎ�������ȡ�
�ۘI�ՌӰ�������̎�����΄�̎����܉�E���ɣ��\�ӿ��ƹ����Լ�������̖�IJɼ��c̎���ȡ�
���У��I�Ռ���3��ģʽ�ĺ��ģ������ӑB׃���ĭh����Ϣ�M��̎������C���˰l���P�����BҎ���\�����Д������΄�̎��ģ�K���{�����ģ�ؓ؟�f�{�I�ՌӸ���ģ�K�����������܁�������̎��ģ�K���Ñ��������ȫ����Ϣģ�K�ĭh����Ϣ�����xȡ�����ӵĚvʷ�������\�ӿ���ģ�Kؓ؟�a���C�����P�����BҎ���\�����У����P��늙C��̖���b��CAN��������ͨ�^CAN�O��l�͡�������̖�ɼ��c̎��ģ�Kؓ؟���˙C���˸��P��������Ϣ�����IJɼ���̎�������x��،����@ʾ����B�D�ϡ�
2)����RT-Linux�Č��r����ϵ�y�OӋ ����windows����ϵ�y�Ŀ���ƽ�_����ֱ�^�ؿ��ƙC���˵ĸ����P��늙C���\�ӣ����ӑB�@ʾ���P���D�ӽǶȼ����յ��Ă��Д�����׃����������windows����֕r�ķǓ�ռʽ�IJ���ϵ�y���o���M�㌦�ߌ��r��Ҫ��ķ��˙C���˵ķ������߿��ơ�
Ҫ���C���˙C���˵ķ������ߣ���횱��C����ϵ�y�Č��r�ԣ����H��Ҫ�s�̿������ڣ�����Ҫ���C�̶��ĕr�g�g�������⣬�C����Ҫ���C�^���ĭh���m�������������ͬ�r̎����N���s�΄գ����Ҍ��r�����΄ձ�������ĕr�g�ȵõ�푑����C����Ҫ�܌��ⲿ�h����׃�����r����푑���߀��횱��C���ٵ��Д�푑��r�g���@Щ�����ͨ�^���r���΄ղ���ϵ�y���Ա��C����˷��˙C�����\�ӿ��Ʊ��Ҫ���ڌ��rϵ�y�Ŀ���ƽ�_��
�ٌ��r����ϵ�y���x�� Ŀǰ�����r���΄ղ���ϵ�y���x���^�࣬��Vxworks��QNX��RTX�ȡ��@Щ���r����ϵ�y���܃��㣬�����_�����^��҃r���F���c֮��ȣ�RT-Linux��һ��Դ�a�_�ŵČ��r����ϵ�y�������_�l�о������܉��ṩ����Ĺ��ܣ�����W�jTCP��IP�f�h�ȡ���ϵ�y���x��RT-Linux����MIH��I�Č��r����ϵ�y��
RT��Linux����Linux�Ļ��A�ό��M���{�ȡ��Д�̎���ȷ����M���˸��M����һ��С�Č��r�Ⱥ�Ƕ�ژ˜�Linux�ĵײ����˜�Linux�Ⱥ�����RT��Linux���ȼ�****��һ���΄��\�С��nj��r�΄��\���ژ˜�Linux�У������ṩ�W�jͨ�ź͔������****���ܡ����r�΄��\����RT��unux�Ⱥ˿��g����Ɍ��r���Ї���Ҫ����΄յĈ���[11]��
�ڻ���RT��Linux�Č��r���Ƴ��� ���r�΄���Ҫ���O����ģ�K�͌��r����ģ�K2���ֽM�ɡ�ϵ�y��D����D4��ʾ��
25�����ɶȡ����˫@�ÙC���˭h���������P����Ϣ�����˙C������Ҫ����ҕ�X���������ǶȂ���������������������_�P��늾��a���Ȃ�������
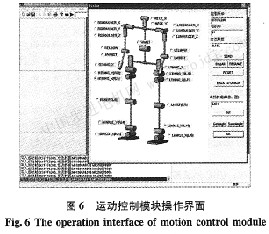
1)���˙C�����P��늙C�{ԇ������Windowsƽ�_�ķ��˙C���˿���ϵ�y����D6��ʾ��
�D��ÿһ���P�����o�������������P��늙C��ͨ�^ԓ���棬�����߿��Ԍ����˙C���˸��P��늙C�M�Ъ��������{ԇ������ԓ�������@ʾ�P��늙C���D�Ǻ��Ѱl�͵�늙C�����ȡ�ͬ�r��Ҳ������ϵ�y���ƾ���Ҫ�ߕr(����100 ms�r��)���Ʒ��˙C���˸��P���ąfͬ�\�ӡ������߿�����ϵ�y��ʼ���r����ָ�������@ʾ�Ă�����̖��CAN������ID̖��Ȼ��ͨ�^����windowsƽ�_�Ă�����̖�ɼ��c̎��ģ�K�@ʾ���挍�r�@ʾ������̖��׃����
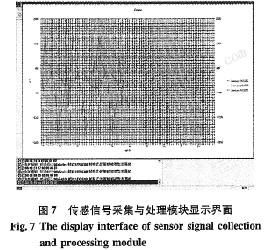
���⣬������Ϣ�ɼ��c̎��ģ�K߀������ҕ�X�� �X��̖�IJɼ����ӏ��˷��˙C���ˌ��ڶ�ý�w��̖��̎��������ͨ�^����windowsƽ�_�ķ��˙C���˿���ϵ�y�@��������˷��˙C�����{ԇ��Ч�ʡ�������̖�ɼ��c̎��ģ�K�@ʾ���棬��D7��ʾ��
2)���˙C����ϵ�y���r�Ԍ����˱��^2����ͬ�IJ���ƽ�_�Č��r���ȣ���CAN���������ʞ�500 kbps���������ڞ�10 m����r�£��քe�ڻ��ڲ�ͬ����ϵ�y�Ŀ���ƽ�_�ό����˙C�����M�Ќ��r�Ԝyԇ���^����D8��ʾ��
�����@ʾ���mȻ����windows�ķ��˙C���˿���ϵ�y�ڙC���˵�늙C�{ԇ��ƽ�_�������Լ����Д������@ʾ���cRT-Linux����ƽ�_��Ⱦ����^��ă��ݣ�����10 ms���ȵ���r�£�ԓ����ϵ�y�����^��ĕr�ӣ��o�����F���_�������P�������l�͕r�g�g���Ŀ��ƣ��l�͔������ڏ�5 ms��40 ms���ȣ�����ȱ��Ҏ���ԣ����ܝM����˙C�������ߵĿɿ����c���r�Ե�Ҫ��֮����RT-Linux�£�����ϵ�y���Ծ��_�ؿ���10 ms���P�������l�͕r�g�g������֝M���ˌ����r�Ե�Ҫ���Ҿ��з����ĕr�ӣ��P�������l�͕r�g�g���`����0��2 ms�ԃȣ��M�����䷀���Ե�Ҫ��
�C������������RT-Hnux�Č��r����ϵ�y���Ժܺõ؝M����˙C���˵ĸ��P��늙C�Č��r���Ƶ�Ҫ���ڌ��F���˙C���˷��������Dz��ɻ�ȱ�ġ������īI[11]������RT-LinuX�Ⱥ���Ҫ������������ģʽ�£������ڷ��˙C����늙C���{ԇ�Լ���ý�w��Ϣ��̎���������Ҫ�ڻ���windowsϵ�y�Ŀ���ƽ�_���M�ЈD�ν���IJ�����̎����ý�w������Ϣ��
5�Y�Z
����ᘌ����˙C���˵����ɶȶ࣬���Ə��s�����r��Ҫ��ߵ����c���OӋ���pϵ�y�ķ��˙C���˷ֲ�ʽ����ϵ�y�����������windows����ϵ�y�Լ�RT-Linux����ϵ�y���Եă��c���������a�˸���������ȱ�ݣ�����ԓϵ�y��MIH-I�ϵõ��˳ɹ����á� |