�в�����늙C�ŷ����Ƽ��g�о��Mչ
ժҪ������늙C���É���մɵ��扺�Ч����������D����Cе�ܣ�늙Cݔ��ݔ��֮�g�������@�ķǾ��Ժ͕r׃�ԣ����¿��Y�ˇ������в�����늙C���Ƽ��g�İlչڅ�ݣ�Փ�����в��ͳ���늙C�ٶȿ��ƺ�λ�ÿ��Ƽ��g���о��Mչ��
�P�I�~������늙C���ŷ����ƣ��о��Mչ
O����
����늙C(u1��sonic Motor���QuSM)�LJ����ʮ����lչ����������늙C������һ�N������մ��扺�Ч�����l���^�������������ͨ�^��N���ģʽ���D�Q�c��ϣ�ʹ���
�D׃�əCе�ܵ����b�á������������늙C����һ�Nֱ����늙Cȡ�����w�ٰlչ���������ŷ����Ʒ���������F���䃞���������ԡ�����늙C�ij��F���F�ڃH��ʮ����ĕr�g�������ѽ������ڹ��I���ơ����܃x���x������܇����������k���Ԅӻ��O�䡢���ܙC���˵��I���С�����늙C�ƏV���ú������ӿ��Ƽ��g�ֲ��_�ģ�ֻ�нY����Ч�Ŀ��Ʒ����Ϳ��Ʋ��ԣ����ܳ�ְl�]��늙C��****���ܡ�
1�в�����늙C�ٶȿ��Ƶ��о�
����늙Cݔ��ݔ��֮�g�������@�ķǾ��Ժ͕r׃�ԡ��D�ٿ�����Ҫ�֞�p��늙C�r׃���ԵĠ�B�������ƺ��D�پ��_�{����ݔ���������ơ�
1 1��B��������
���˿˷��C���c�S늙C�ض�׃����Ư�ƣ�ͨ���к�O늉����ƺͺ㼤��늉�����迹�ǿ��ƃɷN�������������@��Ʒ�ʽ�У��������������������D��ֵ������늙C�����Ġ�B�����������D1��1992���ձ���Funlya�OӋ�Ļ���H�{�����ĹO��������D�z��ʹ�O늉�E s�������S늙C�ض�׃����׃�����p���ɜ���������늙C�D��׃�����D2�����OӋ�ĺ��迹�ǿ؈D��
�������ɼ�늙C늉���̖�������̖�����b������a����늉���̖�ɷ�ӳ�в�����늙C��Ч�·���迹��׃����������ͨ�^�{���l�ʿ���ԓ늉���̖������׃���˷�늙C�C���c�����������׃����
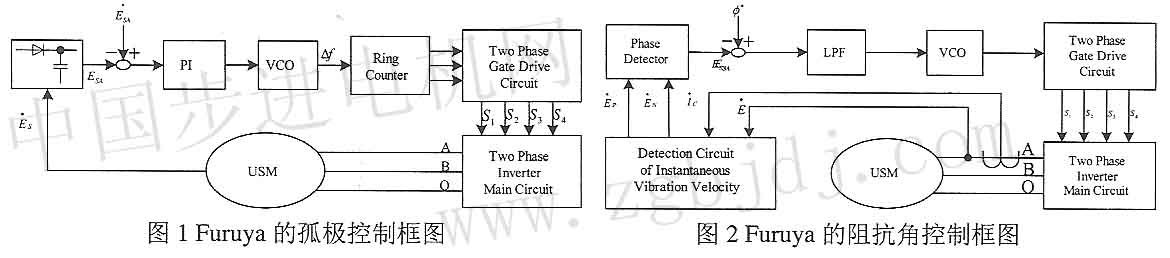
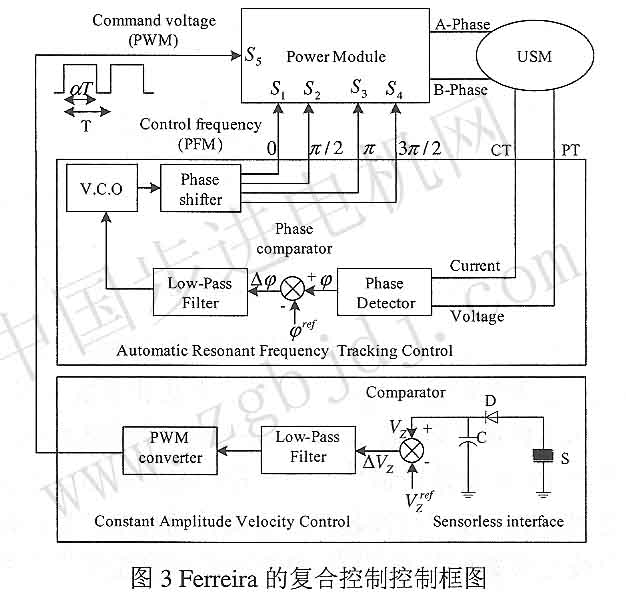
1998�귨����Ferreira����˹O늉����迹���p�]�h�ͺϿ����ţ�ϵ�y��D��D3��ʾ�������迹�ǡ��{�����l�ʁ��˷��C���cƯ�ƣ����ø����O늉���l��PWM����ռ�ձ�
�˷�����ؓ�d׃����ɵ��C���c׃�����M���˷��D��׃����
1 2ݔ����������
��Q�в�����늙Cݔ��ݔ���g�ķǾ����Pϵ�̈́ӑB���Wģ�͵IJ����_�ԣ��ٶȿ����㷨��ͨ��Ҫ����ģ������Ԫ�����ܭh����׃�����{�����в�����늙C�D�ٿ��Ƶ���Ҫ������
������W�����Ì��H�D�ٻ��D���`���׃�����c�D���`������ݔ�똋�ɶ�Ԫģ���������������l���{�����в�����늙C���D�������M�������P�����о���ͨ�^���H�D���OӋģ��Ҏ�t������ֱ���w�F늙C�ķƾ��ԣ����D�ظ�׃�r��ģ����������ݔ��ݔ����Ҫ���^���{�����ڸ�ۙ������ģ��Ҏ�t���ƶ������y�ȡ�
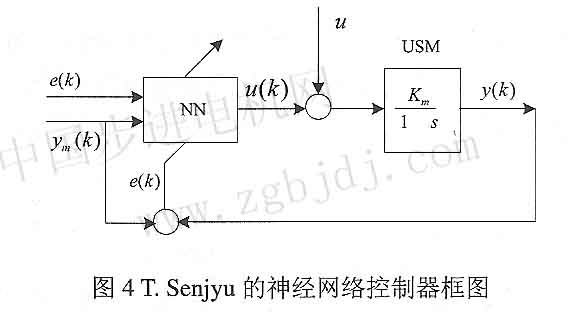
�����W�j���бƽ�����Ǿ��Ե�������1998��T Senjyu����BP�W�j(NN)���ھ��ԌW�������m�����ܣ��ھ��{���������Y��������ͨ�^��׃���l���{��늙C�D�٣��˷�늙C
�\�Еr�ķǾ��ԣ��������Y����D4��ʾ���ڿ������У��D�ٵ��O��ֵ���D���`������W�jݔ�룬�l�ʵ��{��ֵ����ݔ����
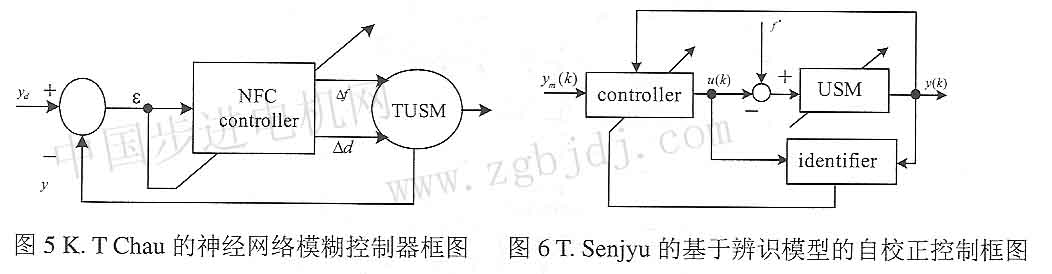
���˽�Q�ο����㷨����Ч�����Ć�K��T Chau�OӋ�˻����W�jģ���������D�ٿ�����(NFC)���������Y����D5��ʾ�衣�����������l�ʡ�늉�(ռ�ձ�)�p�{�������ƣ������{���{�پ��Ի��̶ȸߵ����Ծ����в�����늙C�IJ��ַǾ��ԡ�ԓ���������ٶ��`������ݔ�룬�����W�j����ģ��������ݔ�롢ݔ�������`�ٶȺ�����
1998��T seI��_jyu�OӋ���в�����늙C��У�����������������Y����D5��ʾ��ԓ�����������ھ����Rģ�ͣ�ͨ�^��С���������ԭ�t�{�����l�ʣ�ʹ�O���D���c���H�D��֮��څ����С������Ŀǰ�в�����늙C���A�β��o���_�Ķ�Փ������С��������ʵĿ���Ч�������Rģ����A���Լ��ӕr�ʴ_�x�����ه���^����˿���Ч���ܵ��Ƽs��
������߱��R���ȣ����ȌW�����L�����Ï���������W�j���в�����늙Cģ���M���ھ����R���g�r������߿��������r�\�����ܣ����[�ӂ����ͻ����ȵȅ���ͨ�^�x�����R�@ȡ��
���W�j�ƽ������ܵ�Ӗ���ӱ����������ơ�J��Maas�����W�j���Üyԇ����������ݔ���ݔ��ģ�ͣ����F�˹̶�������PI��׃�����ơ��������ڿ�������Ҫͨ�^������������ģ�͌�������Ҫ���ͨ�����ܵ�Ӱ푡��ڌ��в�����늙C�D�ٿ������Ե��о��У�������W��Ҳ����������������㷨����У�������{����ʽ�W�j�Y���x�͜ضȌ��D�ٵ�Ӱ푡��ȷ�������������ćLԇ��
2�в�����늙Cλ�ÿ��Ƶ��о�
�в�����늙Cλ�ÿ����ǽ������ٶȿ��ƻ��A�ϵģ����c�ٶȿ������S������֮̎��ͬ����Ҫģ��������}ʮ���W�j�ԌW����׃�����{���ֶΡ�����λ��׃�����Կ����D�ٵķe���^�̣�λ�ÿ�����һ�N������׃���{���e��׃�����^�̡����λ�ÿ��ƌ��������{��������Ҫ����ߡ�
����ͨ�^��һ�{�����l�ʲ��ܸ�׃늙C�в����\�ӷ���늙C�D�ӷ���o���{������λ�ÿ������e��λ���S�ӿ����У��ٶȵ���ؓ׃���ǟo������ģ�ͨ�^����������̖��λ�����2ֱ���ГQ��������ГQ�c�D�ٵĄ��Ҷ��ӡ�1995��Tsen��yu�������в�����늙C�����в�����늙C�\�Р�B��Ӱ푣����ڴ˻��A������������l�ʺ���λ����p�{�������ƣ���Q늙C�D��l��׃���r���D�����S���}��������λ�{������PI���ƣ��l���{���t�����`��ͨ�^���εă�ֵ�ГQ���F��
�ڌ��в�����늙C�{���{�ٕr����λ���c�D��֮�g�������^�������a���в�����늙C�\�����^��1998��T��SetDyu���������m�����^�a����ģ׃�Y�����ƣ����û�ģ׃�Y�����ƌ��D�ؔ_�������Ժõ����c�����ϵ�y���D��׃����r�µ�λ�ÿ��ƾ��ȡ��������Y����D7��ʾ��
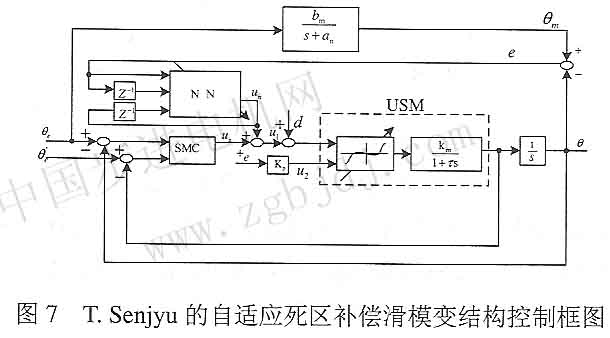
ԓ�����������m���a�����ͻ�ģ׃�Y��������(SM(��)�ɲ��ֽM�ɡ�ͬ�r��ԓ�������У�������ģ���c���Hݔ���IJ�eҲ���뵽�l���{�����������{�l���ƜpСλ�ÿ��ƵĄӑB푑��r�g��
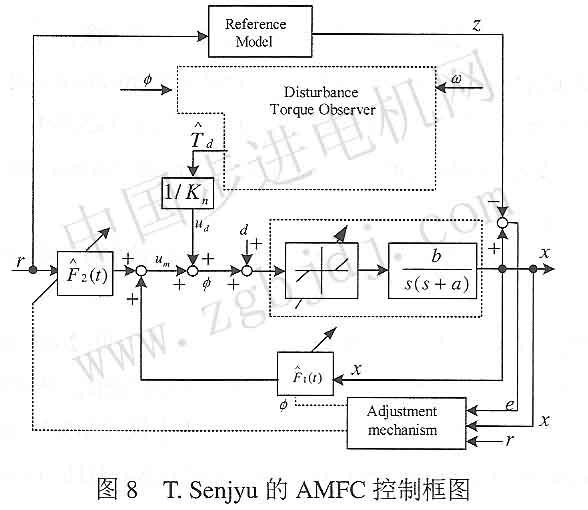
��������{�����ϵ�y�ڌ����������ȵķǾ��Կ���������ͬ��һsenlyu�����ˎ��Р�B�^�y�������m��ģ��ۙ������0�����������Y����D8��ʾ�����ˌ����^��Ч�a��������������
�����D���^�y������ؓ�d�D�ؿ������в�����늙C�Ĕ_�ӣ�ͨ�^�^�y���M���a�����ڌ��H�����У����˿��]ϵ�y�������ԣ������������еą������������ڴ���r���x�����ʽ�\�У��o���_��****Ч����
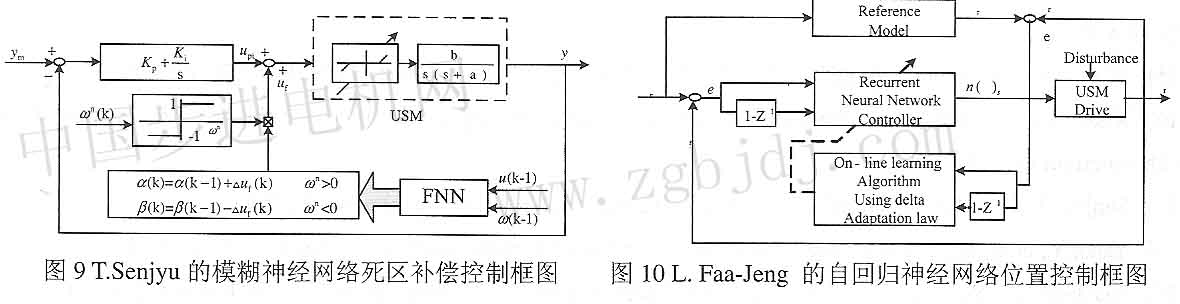
�ڿ��]���^�a���Ļ��A�ϣ����˿˷��в�����늙C�ķǾ��ԣ�ͨ�^�{�ʽʹ늙C�\��Ч��څ��****����2003�깤Sell��ivu����˻���ģ���W�j(frNN)�����^�a����λ�ÿ��������������Y����D9��ʾ����������һ����Ҏ������PI��������һ������ģ���W�j���a�����M�ɣ�PI������ֻ�谴���d��r�µą���ֵ�\�У������D��׃��������\����I�켰�Ǿ��ԣ��t��
����ģ���W�j�a�����M����Ч�a����
������߿������ԌW���������Ք��ٶȣ�2000��lt��Faa��Jeng����������f�w�W�j�{�����ƅ������������Y����DlO��ʾ��ԓ��������ǰ��������ǰ���o�B��Ԫ�W�j�Ŀ��������и���ĄӑB푑�����������������ݔ���{�������һ�����l�ʣ���˟o���˷��в�����늙C���D���׃����ɵ��D�ٶ��ӣ������[�ә�ֵ���{���ܵ�����ģ�ͅ������Ƽs�������ڿ���Ч�����M������ߡ�
3�YՓ
����늙C�Ƕ��W�ƾC�ϵĮa����漰���Cе����W���W��������W�����όW��Ħ���W��ȫ���ڙC����������Փģ�ͽY���������s�����\�з�ʽ���ӿ��Ʒ�����ȫ��ͬ�ڂ��y��늴�
늙C���F��߀�]�кܺõĽ�Q����늙C�����r�Ǿ��Ժ͕r׃�ԣ��@�o늙C�đ��Î����ܴ���ϵK����˺������xȡλ�ÿ����㷨�Y�������D�ٿ����cλ�ÿ��ƾo�ܽY�ϣ���������в�����늙C�D�ٿ����о��п˷��Ǿ��ԡ��r׃�Եijɹ���������߿��ƾ��ȣ�����λ�ÿ����㷨��ʹ���������ӌ��á�
�����īI

|











