| ����늙C�ں˴Ź����t���O���еđ����OӋ
ժҪ��ᘌ��˴Ź����t���O���Ќ�����늙C�o�Ż�������Ҫ�����ó���늙C������Ȧ���@�Mͨ�^����ӡ�Ħ����ϵ���ԭ�����OӋ��һ��o���в��ͳ�늙C�����ˌ��F����푑��;��_��λ�����ø߾���****ʽ���a�������D�ٺ�λ����̖�������ϲ����D�كȭh��λ����h���p�]�h���ơ�Ӳ���OӋ����PIcl6F913��Ƭ�C
������ƺ��ģ�ĸ�������әC��ԇ�Y���C���˿����OӋ�����Ŀ����ԡ�
�P�I�֣�����늙C�����a����PIcl6F913���p�]�h����
O����
�˴Ź������(Nucleus Magnetic Reson_dnce Imaging�����QM R1)���������o��ʮ����Űlչ������Ӱ���\�༼�g�������ԭ���nj����w��������Ĵň��У��ßo������l�}�_���l���w�Ț�ԭ�Ӻˣ������ԭ�Ӻ˹���������������ֹͣ���l�}�_��ԭ�Ӻ˰��ض��l�ʰl�������̖���������յ�����ጷų��������w��Ľ�������䛣������Ӌ��C̎���@�ÈD���@�ͽ����˴Ź������MR�����O�䣺�������w���γɿɷ֞�������(�S�F��)��늴��ͼ����������N�������ň��ď��ȿɷ֞�߈����Ј����͈����߈���ָ1 OT(Tesla 1T=1000(��˹)���ϵģ��͈���ָ03T���µģ��������Ј��ġ�
����늙C��20���o80����lչ������һ�Nֱ���ӵ�������늙C��ͬ���y늴�늙C��ȣ�����늙C������늴�����Á���f�������������É���մ�Ƭ���扺�Ч�����l���^
�������������ͨ�^����Ŵ��Ħ������D�Q���D�ӻK�ĺ��^�\�ӡ����е��ٴ�Ť�ء��o늴�F�_��푑����١��\�Пo����������i�ȃ��c���ھ��ܿ����I���I����ϵ�y����܇��
��������C���ˑ��á��t���O����I����бȂ��y늙C����Խ�đ���ǰ��[1u3]�����ǻ��ڳ���늙C�o�@�M���o늴ň������c���ɞ�˴Ź����t���O���Ј���늙C��****��
�����͑��~������Ҫ���x��usM50��늙C�����ҟo��늙CҪ��늙C�ĸ���������܌��ţ������ڶ��ӡ��D�ӡ��D�S���S�С��C���Ȳ����x���ϱ���Dz����Ų��ϡ�
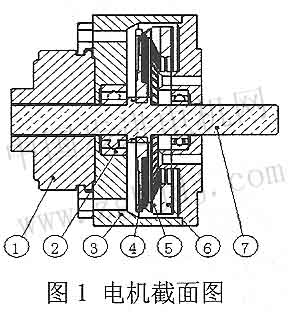
늙C�Y����D1��ʾ��1****���a����2���o���S�С�3�C����4�D�ӡ�5Ħ�����ϡ�6���ӡ�7��ݔ���S�����Ӳ��ϲ����X���~���D�Ӳ���Ӳ�X�Ͻ��S�����S�~���C�������X�Ͻ��S�в����մɻ��S�С�
2������Ӳ���OӋ
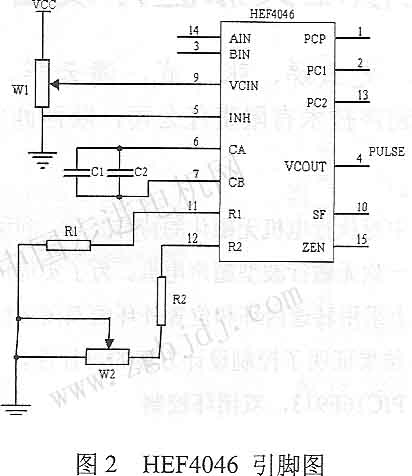
��늙C�ٶ��{�������{�l�{�١�Ӳ���OӋ�����É�����ʎ��cD4046�i��hоƬ������ġ�cD4046�Ȳ������b������������ʎ�������ⲿ���_��D2��ʾ�����鷽���l�����ã�ͨ�^�{��
9�_ݔ��늉��ɡ���С�Ϳ��Ը�׃ݔ��������̖�����l�ʡ�
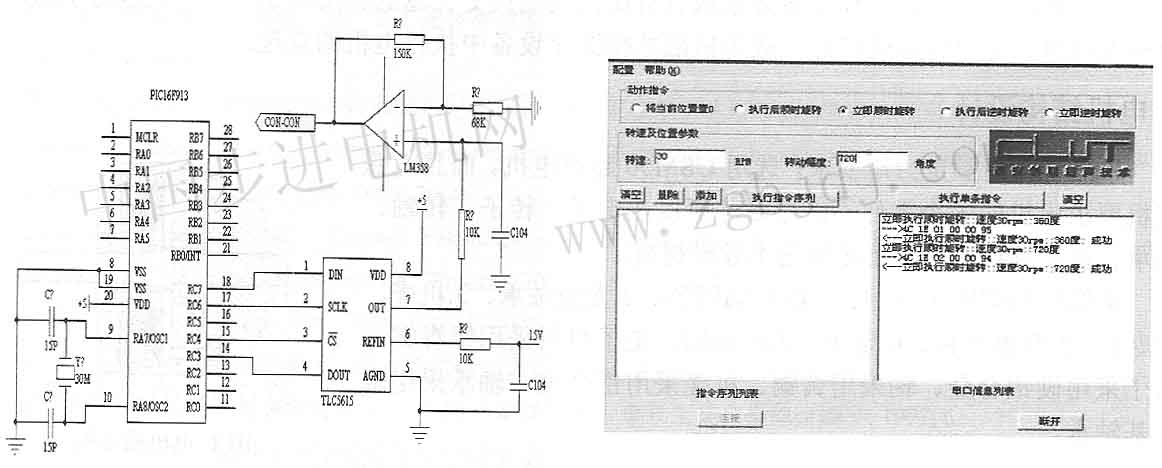
����������8λ��Ƭ�CPIcl6F913��****���a��ݔ����λ����̖���^��a��ݔ�뵽I��O�ڣ����D�r��λ����̖ʮ���M�Ɣ��f�������D�r�f�p�����^�Ȳ�����Ӌ��̎���õ�늙C���D�ٺ�****λ�á������o���D�ٌ��r�{��늙C�D�٣����^D��A�D�Q���\��Ŵ��γɿ�����̖���͵�cD4046��9�_�VCi�����{��늙C���l�ʣ�ʹ늙C�ٶȸ�ۙ�o���D�١���Ƭ�C���r������λ�C�o��λ�ú������D����ָ���h���]�h���ƣ����r�o��cw��ccw��̖��늙C��ͣ��̖��PIcl6F9I 3�����ⲿ�·�B����D3��ʾ��
3ͨ��
��λ�C�Ϳ�������ͨ�Ų��ô���ͨ�ţ��ƽ�D�Q����оƬRs232����Ҫ����������λ�C�l�͵��ٶȡ�λ�á���������̖������λ�C�l���ٶȡ�λ���}�_��̖����������Ҫ���â�sual Basic�Z�Ծ�����ͨ�Ž��棬��D4��ʾ�����Ԍ��Fλ�����㡢형r�D�ӡ���r�D�ӡ��D���O����λ���O�������ҿ����O���B�mָ����С�������֮��늙Cλ�÷��؈�����Ϣ��
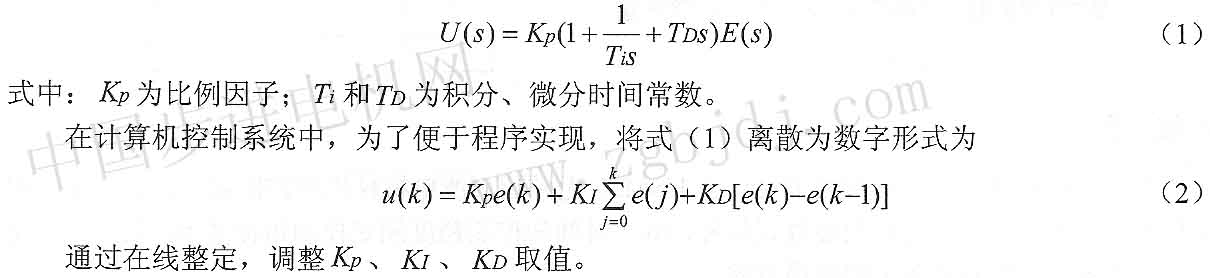
4�����㷨���F
���ڳ���늙C�]�о��_�Ĕ��Wģ�ͣ����Еr׃�ԺͷǾ������������ӵ��C���l�ʕ��S�ضȵȗl��׃���l��Ư��[4�������˝M�����푑������_��λ��ָ�ˣ�����ϵ�y�����{�l���ƣ�λ�Â���������15λ�߾���****���a�������Ʒ������ھC���˳�ҎPID���ơ�ģ�����ơ����m�����ơ��W�j���ơ��������߽Y�ϵ�ģ����PID���Ƶ����c���þ����㷨���Ρ����ȸߡ��ɿ��Ժá������F�ij�ҎPID���ơ����OӋ���ù̶�����PID���ơ�PID�������Ŀ����ɞ�
 5ܛ���OӋ 5ܛ���OӋ
ܛ���OӋҪ��ɿ����c�����Ըߣ������ٶȿ졣���Æ�Ƭ�Cָ��R���Z�Ծ�������Ҫ���܌��F��������λ�C��ͨ�š����r�ɘӾ��a�����}�_��̖��늙C�y�١��������a����̖��늙C�D��
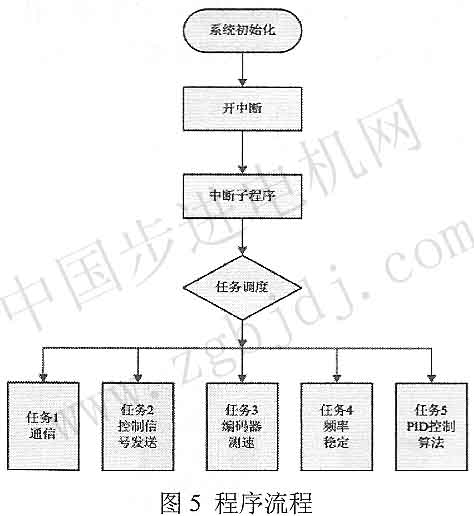
��PID�{����λ�����]�h���ơ����߀��ϵ�y���r��Tjmer���ƼĴ����O�á��Д���ƼĴ����O�á�����ͨ���O�õȡ�ܛ���OӋ���̈D��D5��ʾ��
6����ϵ�yԇ� ����Ҫ���OӋ����ϵ�yӲ����ܛ�����ԇ�ƽ�_����D6��ʾ��늙C��50rflm�ĭh���в��o�ų���늙C��15λ��늾��a������늙C�����dԇ늙C�D��Ҫ���l��gRPM�������ƵĔ��֜y��ϵ�y�M���ٶȜyԇ���yԇ�������1��ʾ�����Կ���늙C�\�Еr��˲�B�ٶ���С����ʎ���@��Ҫ�dz���늙C��ԭ�����Y�������ϡ���ˇ�ȾC�����؛Q���ġ��mȻ��늙C���D��֮�g��Ħ�����ܴ���늙C���˽o��λ�ú�߀�����^�_�ģ����˾��_��λ����ֹ�^�_���D�ٲ���PI����ʹ�D�ӿ쵽λ�Õr�D�ٽ������������Ԍ��Fλ�þ��_��λ��

7�Y�Z
����늙C����ָ�˺Ϳ���Ҫ���OӋ��uSM50�o�ų���늙C�әC�Ϳ�������ԇ�Y������늙C�܌��r��ۙ�o���D�ٺͽǶ�λ����̖��푑��r�g�Ϳ��ƾ��ȝM�����ָ��Ҫ��ͬ�rҲ�،�
�˳���늙C���t���O���еđ��÷�����
�����īI
|











