�߿ɿ�����ͬ��늄әC������Ƽ��g�о�
�����������|�����X��
(�Ї���ӿƼ����F��˾��һʮһ�о������Ϻ�200233)
ժҪ����������������e�ɂ������U��������ͬ��늄әC�������ϵ�y�Ŀɿ����OӋ���g��ӑՓ���p���늙C�����e늙C���M��ň�����늙C�ĽY�����c������Ʒ�ʽ���ڴ˻��Aذ�Mһ���о�������ͬ��늄әC�Ĺ��ϱ��R���g�����e���Ƽ��g���о����ݞ���ԓ���g���Mһ���о�����˻��A��
�P�I�~����ȣ����e���M��ň������R
O����
��������S�������Ӽ��g��늙C���Ƽ��g��̎�������g�İlչ������ͬ��늄әC���Ƽ��g��������Ч�ʡ������ܼ����ܻ�����lչ����һЩ�����I���纽�պ��졢�����b�估늄әC܇���I�ɿ�����һ���Ҫָ�ˡ���ˣ����߿ɿ�������ͬ��늄әC�������ϵ�y���о������зdz��ش����Փ�ͬF�����x��
�ɿ�����ָ�aƷ��Ҏ���l���º�Ҏ���r�g�ȣ����Ҏ�����ܵ��������ڷ������Y������ɿ��Լ��g���о��ɹ���****�Mչ��������ͬ��늄әC�������ϵ�y�ɿ��Լ��g�w�{�����༼�g�����e���g[1]�����༼�g��ͨ�^���Ӷ����YԴ����߿ɿ��Ե��OӋ��������������о����p�������ͬ��늄әC�������ϵ�y���S��������̖̎�������F�����Ƽ��g�İlչ�����څ������R���g������ͬ��늄әC���e���Ƽ��g�ɞ����о��ğ��c��ϵ�y�����������R�Y�����z�yϵ�y�\�Р�B������������r��׃���Ʒ�ʽ�����Fϵ�y�ؘ�������ϵ�y���ܲ�׃��������Ե�����ͬ��늄әCϵ�y�����e늄әC������늄әC�͙M��ň�����늄әC��
���ď�����ͬ��늄әC�ĽY�������Ʋ��ԡ��·�ؓ�Y����늄әC���e���R�����e���Ƶȷ����^ϵ�y�U�������߿ɿ�������ͬ��늄әC�������ϵ�y�Ĺ�����ʽ���о��F�����ڵĆ��}�������Ƅ��҇���ԓ�I����о���
1�p�������ͬ��늄әC����ϵ�y�о�
���F��ȿ���һ���ЃɷN��ʽ�����ݺ͟��ݡ�������ָ��������r�£�ֻ��һ�����������������һ��Ȳ���������ϵ�y���F���ϕr�������г��l�����ϵ���ȣ�ͬ�r��һ����_ʼ������������ָ��������r�£������ͬ�r��������ijһ��ȳ��F���ϕr��ϵ�y�г��l�����ϵ���ȣ����Æ���ȷ�ʽ���������ϵ�y�������ʣ���늙C����ȿ���ϵ�y��һ������p��ȵğ��ݿ��Ʒ�ʽ�����Ȍ��p�������늙C�������ϵ�y�M���о���Ҫ�������������I��W���������պ����W���Ͼ����պ����W��
1.1�p�������ͬ��늄әC�����Y��
�����p�������ͬ��늙C�ڽY���ϵIJ�ͬ���ɷ֞�ɷN��ͣ����Y���ͺʹ��Y����[2]��
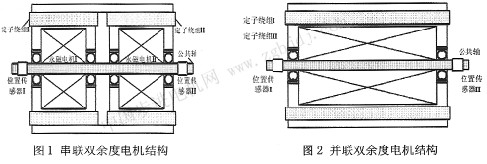
���Y��������ͬ��늄әC���Ƀɂ�����������늙Cͬ�Sͬ�����b����Dl��ʾ�����Ѓ��ת������@�M���ɂ����_���D�輰����λ�Â������������й�ͬ��늙C�S����ԓ�Y���У��������ڃ����@�M���Ĵ���ϬF���ƺ��Σ����䌍�H�����Ƀ��_늙C���M�ɵģ�����w�e�^��ͬ�rһ��늙C�l�����ϕr��ԓ늙C���ɞ���һ�_늙C��ؓ�d���Ķ�ʹ��늙C�ęC늕r�g����׃�ӑB���Խ��͡�
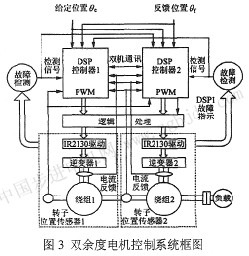
���p��ȽY��ֻ��һ���D�ӣ������F���ϸ���Ƕ�������ת�����늘��@�M�������ă���λ�Â�����������늙C�S�����D�ӣ��p���@�M���Ƀ����g���30��늽Ƕȵ����༯���@�M���ɣ������pY�νӷ����γɲ�ʽ�p��ȽY������Y��ʾ��D��D2��ʾ���c��ʽ�p��ȽY����ȣ���ʽ�Y���pС��ϵ�y���w�e����늙C�@�MǶ�žW�y�����҃����@�M�g���ڴ���ϣ���˿��ƽY���^���s��
1��2�p�������ͬ��늄әC����ϵ�y���g
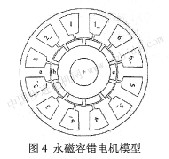
�D3��һ�N�p�������ͬ��늄әC���Ʒ�����ԓϵ�y���Ѓ�������������λ�Â�����������CPU���������ɂ�CPUͨ�^�֮�gͨӍ���p��ȹ����r��CPU̎�����Ă�ݹ���ģʽ��һ��CPU���ƃɂ���������CPU�l�����ϕr����һ��CPU�ӹܹ���CPU���΄գ��@�N������ʽ�����˃ɂ�cPu���Ƶ�ͬ���Ԇ��}�����������r�������@�M����_늙Cͬ�r��������ijһ���@�M��һ�_늙C�l�����ϕr��ϵ�y�ɏ��p��ȹ���ģʽ�D���ͨ������ģʽ��
��ijһ�������l�����ϕr��ϵ�yͬ�ӏ��p��ȹ���ģʽ�D���ͨ������ģʽ�������Ϸ�����֪��ԓ���Ʒ����ĽY���Ͻ�Q������ͬ��늄әC����ȫ�p��ȿ��ơ�
���ϙz�y�·����ȿ��Ƶ���Ҫ���ݣ��O�صĹ��ϰ���늙C�@�M���ϡ��������ϡ�λ�Â��������ϡ�cPu���ϵȡ�
2 ���e����ͬ��늄әC������Ƽ��g�о�
�p���늙C�@�M��·�r������늙C�]�дŸ��x�͟���x��������˶�·�@�M�a���Ĵ�机͟�������ϵ���һ���@�M�У��Ķ�����늙C���\�����ܣ�����������늙C�o������������ᘌ��p���늙C���Ƽ��g�ıˣ��������_չ���P�ڷǂ������ͬ��늄әC���e���g�о���ԓ���g�����c��늙C����һ���@�M��һ����������ijһ����F���ϕr��ͨ�^����ʣ���������ķ�ֵ����λ������ϵ�y�����\�У��Ķ��߂䏊���e���������ϵ�y�Ŀɿ���[3]��
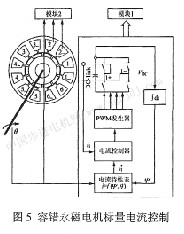
2��1���e����ͬ��늙C�Y�����e����ͬ��늙C�����@�Mͨ�����ö���ĽY�����c���������늙C���^����������e����늙C�����D���}��С��ϵ�y���o�B���Ժã�������ޕr���Ɍ��F�ιܴ�������[4]���D4�����භ�O�������e늙C�Ķ��S�Y��ģ�͡�
�c���y����ͬ��늙C���^���������e늙C���w�Y�����дŸ��x���������x������x��늚���x�ʹ�늸е����c����˾��к������e������
(1)�������x�������Xֻ�@��һ�༯���@�M������ÿ������ֻ��һ����Ȧ߅����ÿ���@�M�����ü���ʽ���X�@�ƣ��Ķ�ʹ�ø����@�M�����ܴ��������ϵĽ��|���@�������������@�M��·���ϵİl����
(2)����x������ÿ���@�M�����������x�ģ���ˣ������@�M���a���ğ������y���f���������@�M�ľ�Ȧ߅���@�������˶�·���@�M���a���ğ������������@�M�������w��Ӱ푡�
(3)�Ÿ��x�����ڶ����X���ØOѥ�Y����ÿ���@�M���Ǹ��X�@�Ʋ����D�Ӳ������Nʽ�ߠ����ŽY�����@�ӿ��Խo��·�@�M���a���Ĵň��ṩ�]�ϵĻ�·���Ķ������˴���ϡ�
(4)늚���x������ÿ���@�M���ɪ����Ć���ȫ��׃�Q����늣����һ���@�M���ʹܓp�ĕr������Ӱ푵��������늉�ݔ����ͬ�r����H���늙C���w�Y�����������ڌ��Fϵ�y��ģ�K�������ھS�o��
(5)�������ƶ�·��������������������e늙C�Ķ��Ӳ��ØOѥ�Y��������ʹ��������Ķ��Ӳۣ��Ķ������@�M��©�У���ˣ�ֻҪ�������©�У��Ϳ��Ԍ���·����������~�����������
2��2�������eͬ��늄әC���Ƽ��g
�������e늙C��һ�N�����·�������������ͬ��늙C��ͨ�^���ش�·�OӋ�����˳�ҎPMSM�и����@�M�g���ڵĴ�������ԣ����J���������e늙C����n�������@�M���ɵ�n��늙C�������������e늙C�����c���īI[5]��������������������D��ֱ�ӿ��Ʒ������o��M��ʸ������׃�Q����������늙C�����@�M����cԓ�෴늄���λ�Pϵ��ͨ�^�{���������ֵ����λ���Ɍ��F���ચ�����D��ֱ�ӿ��ơ������ϵ�y��D��D��ʾ��늙C������׃
������H����׃��������Ŀ�˵IJ�ͬ�����e����늙C����������ƿɲ�������c���d��늄ӄ�ͬ��λ���Ʒ�ʽ��****�D�أ�������ƺ�****ݔ�����ʿ��Ƶȡ�
3�M��ň�����ͬ��늄әC���Ƽ��g�о�
�M��ň�����늙C���ɵ�****��늙C����H��Weh������1988�����������һ�N���͵ęC�һ�w�����{��ϵ�y[6]���c���y늙C�Ĵ�·�Y����ͬ��TFPM늙C��늘��@�M�c����·�ڽY������ȫ�����˿��Ը�����Ҫ�{����·�ߴ�;������ځ��_��늙C��늴�ؓ�ɣ������ڂ��y늙C�����Ӛ�϶��ͨ�c�@�M����ܶ�֮�g�Y���ϵ���Ƽs�Pϵ���Ķ��@���^�ߵ��D���ܶȣ������_��80 kN��m2���ϡ�����֮�g�]��늡��ŵ���ϣ����F��늺͟�ĸ��x���c���y늙C���^���M��ň�����늙C������F���c��
(1)ԓ늙C�еĴň��ֲ������S�ģ�����ͨ��늙C�ď�������ň��⣬߀���S��(�M��)
�ň����ʷQ֮��M��ň�����늙C��
(2)늙C�����g�]����ϣ����Ԫ��������c���ơ�
(3)�ɹ��Ƭ�B�ɵ��D���F�IJ��ݺ�Ƕ��ʽ�����w��ͬ���ɾ۴ŵĽY�����ܮa���^�ߵĚ�϶���ܡ�
(4)�Y���OӋ�����ɶȴ�Ȧ����e�����Ƽs�����_���^�߾�ؓ�ɡ�
(5)�����^�����F���O�Y�����e�m���ڵ��D�١����D��ֱ�����I����đ��á�
(6)늙C��ģ�K���Y�����ڽM�ɶ�����ʽ��ȱ��Ҳ��������������������e������
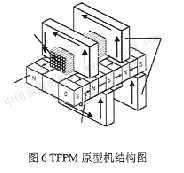
�D6��H_.Weh����������ęM��ň�����ͬ��늄әCԭ�͙C����IJ��ֽY��ʾ��D��n��ԓ�Y�����D�S�ϵ�ƽ�в��ã��M��2n���M��ň�����ͬ��늄әC�������������M��ň�����늄әC�����g�]����ϣ��ɪ��������Ϳ��ƣ���ˈD5��ʾ����ϵ�yͬ���m�ϙM��ň�
����ͬ��늄әC���ơ�
4����ͬ��늄әC���e���R���g
�S��������ϵ�y�ɿ���Ҫ�����ߣ����e���Ƴɞ�һ�����S���о��I��ϵ�y���e�\��������Ҫ�M��ϵ�y���ϵęz�y���\��(FDD��FaultDetection a nd Dlagnosis)��Ȼ�����FDD�ĽY���ؘ�����ϵ�y����ˣ����ٜʴ_�Ŀ���ϵ�yFDD���nj��F���e���Ƶ���Ҫǰ�ᡣͨ�^��ϵ�y������̖�ęz�y���Fϵ�yFDD��ͨ�������·���[7]��
(1)����ϵ�y�������ڽ��e�ۣ������ܳ��F�Ĺ��ϼ������ĬF��һһ�г����w�{��Ҏ�t����֪�R�졣���l�����ϵĕr��ֻ��Ҫ�^�y���ϬF��ԃ֪�R�켴���Д������͡��@�N�����\������ٜʴ_�����m���ڸ��N���Ʋ��ԵĽ�������ϵ�y����������֪�R���y�Խ������@�Ǵ˷���δ���V�����õ�ԭ��
(2)ƽ�����Parkʸ������ͨ�^��늙C�Ķ��������Park��ʸ���M�бO�y���\����׃����늙C���ϡ���������r�¶������Parkʸ�����㣬���ϳ��F�ĕr�����_�P�_·���·���˕r������г��Fֱ��������������Q���˕rParkʸ��������һ���ķ�ֵ����λ������ͨ�^���ֵ����λ�IJ�ͬ�Д�����ϵ�����Լ����F���ϵ��ࡣ�@�N�����mȻҪ��ϵ�y��һ����Ӌ��̎�����������ǿ�ݿɿ���
(3)늉��z�y����ͨ�^������׃�����ϕr��׃����늉���늙C��늉���늙C��늉���늙C�����c늉��c�����r��ƫ����\����ϡ����ģʽ�Ĺ����\����Ҫ����һ���������ڵĕr��������ɣ���늉��z�y��ֻ��Ҫ�ķ�֮һ�������ڱ��ܜʴ_�ؙz�y�����ϣ����ؿs�̵��\���r�g��ֻ���@�N������Ҫ����늉�������������ϵ�y�ɱ���
��늙C����ϵ�y�У�λ�Â�������늙C�����еĺ��IJ�������Ҳ�ǹ������^�ߵ���������˻���λ�ñ��R�ğoλ�Â��������g�����ϵ�y�ɿ��Ե�һ����Ҫ�ֶ�[8]���ڟoλ�Â��������g���棬�����ⱊ���W��չ�_�˴������о�������˶�N��Փ�ͷ������oλ�Â������z�y������ָ���Dz�ֱ����늙C�Ķ����ϰ��bλ�Â�������z�y�D��λ�ã����ǘ���һ���D��λ����̖�ęz�y�·���������M��Ӌ��C���g�͙z�y���g����Ӳ����ܛ���ɷ������늙C������늉�����ȅ������@���D�ӵ�λ����Ϣ��Ŀǰ��������ͬ��늄әC���Ƶ�λ�ñ��R���g��Ҫ�������ֱ��Ӌ�㷨������늸�׃���Ĺ�Ӌ�㷨���^�y�����Ai���Ĺ��㷽����ģ�ͅ������m���������l��̖ע�뷨���˹�������Փ���A�ϵĹ��㷽���ȡ�
5���e���Ʋ���
���e������ָʹ�OӋ�Ŀ���ϵ�y���l���Ĺ��Ͼ������e������һ�N���Ʋ��ԣ����Ը��õ����ϵ�y�Ŀɿ��ԡ����鱻�V�������ڸ��늙C��ϵ�y��һ�N���Ʒ������īI[9]��ʸ�����Ƶ����e�����M����������о�������Ҫ˼���ǹ���ǰ������a���Ě�϶���D�ň���׃����늙C�����\�Еr��������������քe�����飺
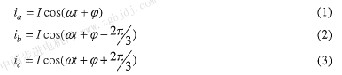
ʽ�У�ia��ib��ic���@�M����������؞�������l�ʣ����������ʼ��λ�ǣ�I�����������ֵ�����Ӵ�朿ɱ����飺
N��ÿ���@�M�є�����=1<120����
��ijһ��l�����ϣ���ϵ�yһ���г���ԓ����������㣬����b��l�����ϣ��鱣��ϵ�y�����\�У�����ǰ�������D�ň������ֲ�׃��
��ʽ(4)��ʽ(5)��ȣ�����ö��Ӄ��������
����ʽ(6)��ʽ(7)���Եõ����½YՓ��ͨ�^��a��c������M�з�ֵ����λ���{������
��ʹԓ늙C��ϵ�y��b����Ϡ�B�«@�õ�ͬ�������\�еĴńӄݣ�Ҳ�����fԓϵ�y���Ԏ������\�С�����߀�����������������F����ֻҪ�M��һ���ėl����늙C��Ȼ���Ԏ������\�С�ͬ�Ӹ�����朲�׃��Փ�����ֱ���D�ؿ���ģʽ�£�늙C�����e���Ʋ��ԡ�
6�Y�Z
�����ڿ��Y������ɿ��Լ��g�о��ɹ���****�Mչ���A�ϣ��������������ͬ��늄әC�������ϵ�yϵ�y�ɿ��Ե���Ҫ�������\��ԭ����ͨ�^������ͬ��늙C�������ϵ�y�ɿ��Լ��g�w�{�����༼�g�����e���g���քeӑՓ���p�������ͬ��늄әC�����e����ͬ��늄әC���M��ň�����ͬ��늄әC�ĽY�����c�����Ʒ�ʽ��ӑՓ�˳�Ҏ����ͬ��늄әC���ϱ��R���������e���Ʋ��ԡ�Փ�ă��ݞ���ԓ���g���Mһ���о��������b�����á�
|