���ڿ��ı�늙C��SPWM�cSVPWM�����о�
����飬�۶������S·����ī
(�Ϻ���W���Ϻ�200072)
ժҪ��SPWM�cSVPWM����ǰ���õ��{��ģʽ�����V�������ڸ��N����늙C���{��ϵ�y�С����ı�늙C���������ݵĿ������ԣ���������ܵĂ��әC���������˽���늙C�İlչ����֮һ����Փ������SPWM�cSVPWM�{�Ʒ��������c��ͨ�^�������l�������ڿ��ı�늙C�Č��H��������Matlab��simuIink�н�������ʽ׃�l�{��ϵ�y������Y��������SVPWM������SPWM�ĸ�늉�������һ������F������и���ľ����{�Ʒ����ϣ�ͬ�r���F����ͬ�ľ����{�Ʊ���SVPWM��SPWMҲ�܉��и��ߵ��Դ�����ʣ�����SVPWM������Ч�pС늙C���}�����ڷ��B��������ͬһ�N�{�Ʒ�ʽ�ľ����{�Ʊ�Խ�ߣ�������ķ�ֵԽ��
�P�I�~�����ı�늙C��SPWM��SVPWM��׃�l�������{�Ʊ�
O����
�ڽ���늙C�{��ϵ�y�У�ͨ�^���ú��m��PWM�{�Ʋ���һ�������ʹ늙C���ڽo���Ŀ�����̖�����ʴ_���ٵ�푑�����һ���棬���ԜpС늙C���D���}�ӣ����늙C���\�з����ԣ������،�늙C���{�ٱ�[1]��Ŀǰ���õ��{�Ʋ���SPWM��SVPWM��
���ı�늙C�ĽY���Ͽ��Է֞�oˢ����ˢ����oˢ���ı�늙C�����Ӳ��ö��ӟo�X�۽Y�����@�N����Y�����������X���D�أ���ˢ���ı�늙C�D�ӟo�Fо�����ı�늙C�ڸ߾��ȡ����{�ٷ����ŷ����еõ�Խ��Խ�V���đ��ã������Ч�������D�Q�b����������늄әC�İlչ����֮һ[2]�����������õğoˢ���ı�늙C���������ρ��������Ե�Ч������ͬ��늄әC�����䌍�H��Ч�Ľ�ֱ�S늸���Ҫ�hС�ڳ�Ҏ������늄әC��
����ͨ�^��Փ�����͌��l�����������ڷ���ܛ������ԇ���ı�늙C�ϣ�ͨ�^�_�h׃�l�{�ٌ���SVPWM��SPWM�������M�з�����^��
1 SPWM�cSVPWMԭ�����^
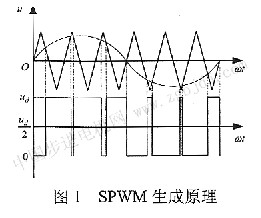
һ��PWM�{���nj��{�Ʋ��c�d���IJ����M�б��^���Ķ��õ��ĵȸ߶����Ȍ����}�_���С�SPWM�{�Ʒ�ʽ��ʹ�}�_�Č��Ȱ�������Ҏ��׃�����Ķ���Ч���Ϻ����Ҳ���Ч�������㷨��һ�_ʼ����Ҫ�����Ҳ����{�Ʋ�����ԭ��D��D1��ʾ��
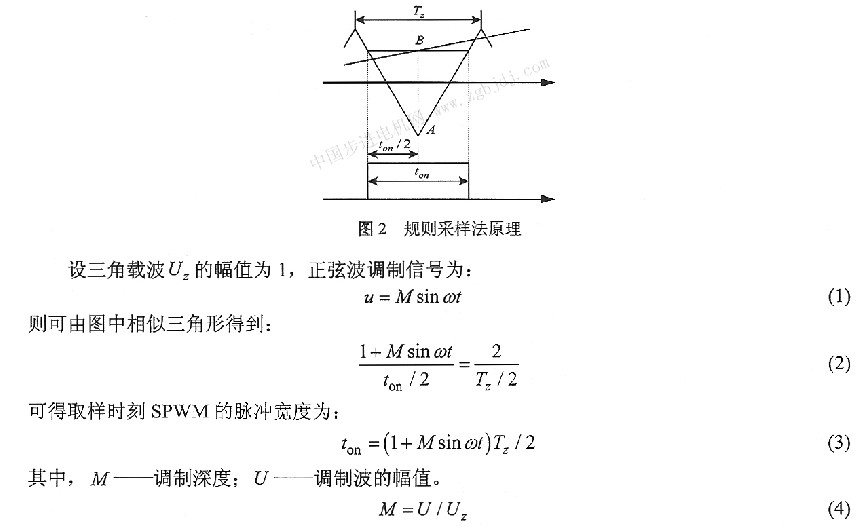
�ڔ���ϵ�y�У�һ�㰴��Ҏ�t�ɘӷ���ԭ�t�팍�F����D2��ʾ��
��M>1�r�����^����ݔ���͕�̎��͠�B���˕r��ݔ���Ļ��������ķ�ֵ�Ͳ��c�{�ƺ�
��(4)��ֵ�ɱ����ľ����Pϵ���Ķ���ɲ��ΰl����׃���C���ɷ����ӡ���ˣ����{����Ȟ�1�r���������B�ӵ��@�M�У���늉�Us�������_��****ֵ����ֱ��ĸ��늉���һ��Vdc��2��
���У�r���������{�Ʊȡ�
��Ҋ��SPWM�{��ģʽ�£�****�����{�ƱȞ�1��
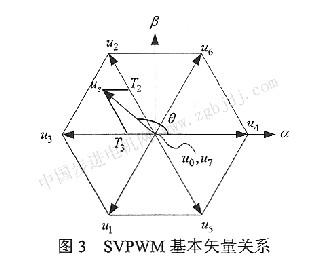
��SVPWM�Ļ���˼����ͨ�^�˽M����늉�ʽ��׃��Ļ���늉�ʸ��(000��001��010��011��100��101��110��111������O��ʾ�Ϙ���P�࣬l��ʾ�Ϙ�ی�ͨ)���oֹ����������ϵ�Ё��ϳɶ�����늉�ʸ��us��
���˽M����ʸ���������_�P�܄�����С������M�����У�����u1��u6��ʾ����ʸ������ģ�L��Vdc2��3��u0��u7�քe��ʾ000�c111����ʸ�����ஔ��늙C��ݔ��˶�·���t�����ʸ���Pϵ���D3��ʾ��
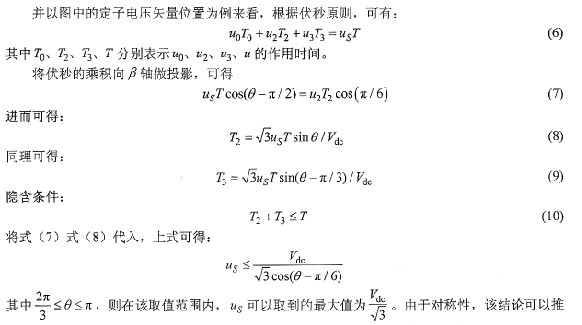
���ԈD�еĶ���늉�ʸ��λ�Þ�����������������ԭ�t�����У�
�V�������傀�^�g����ԓ�YՓ��֪��
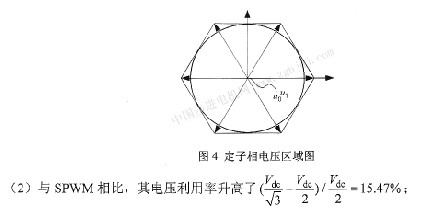
(1)������늉������_���ą^���ԓ���M����ʸ�������ɵ���߅�εă��ЈA����D4��ʾ��
(3)���չ�ʽ(5)�Ķ��x���cSPWM��ȣ�SVPWM�ľ����{�Ʊȴ���1���ஔ���،����侀���{�Ʒ�����
2���挍�
2��1���l������
���ڿ��ı�늙C�Č��H������ͨ�^Matlab��SimLflink�������C���ϽYՓ�����ң�ͨ�^���棬���о�SPWM�cSVPWM�����ı�늙C�Č��H�{�����ܵ�Ӱ푡������܉�ʴ_�ı��^�ɷN�{�Ʋ������ܣ�������ڃH�Ɇ�һҪ��Ӱ푵���r���M�У���Ҫ����l����ʹӰ�늙C�D�����ܵ�����ֻ���{�Ʋ���
�M��Ŀǰ���ڽ���ͬ��늙C�Ŀ������T��F0C��DTC���T������㷨������ԇ��У����ڸ��N�㷨�����е��{�Ʋ���ʽ��ͬ����������ȡ�ض����㷨����ʹ�Ì��ʧ�ʡ���˱�����������ʽ�_�h׃�l�{��ϵ�y���M����C��
ͬ��늄әC�У��D���D��n�c����������l��_�S������
���У�p��늙C�O������������ϵ�y�У��D�ӵ��D����ȫ�ɶ����l�ʁ�Q������늙C�yһ��Փ����[3]��늙C���D�أ�
���У�k�����c늙C���w���P�ij�����Fr��Fs�����D�ӡ����ӵĴ�ͨ�ݣ��ա������D��֮�g��ͨ�ĊA�ǡ�
�����չ����غ��ԭ�t���Դݔ����й����ʾ͵���늙C���ĵČ��H���ʡ���ˣ�����ͬ�Ķ�������l�ʣ�ĸ��늉����Լ���ͬ��ؓ�d�D�ص���r�£������^���������Чֵ�������Եõ��ɷN�{�Ʒ������Դ�����ʵĸߵ͡�
������ͬ��늙C��늴��D�ع�ʽ[4]��
��Ҋ��늴��D��ݔ����****ֵ�c�����������Чֵ���������Pϵ��
2.2����ģ�ͽ���
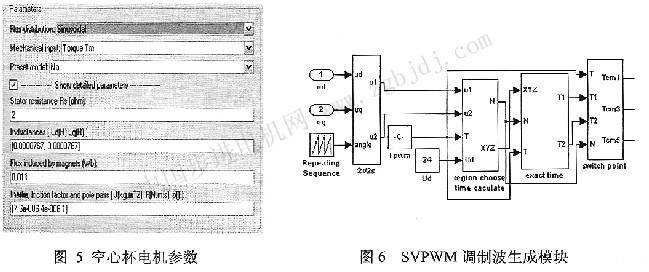
��ǰ���������ı�늙C���c��ģ���ϣ����Ե�Ч������ͬ��늙C��������ʹ�õ���Matlab7.5������ֱ��ʹ�÷����Ԏ���PMSMģ��[5]�����Ѕ����O����D5��ʾ��
����SVPWM�Ļ���˼�룬���Խ���SVPWM���{�Ʋ�����ģ�K����D6��ʾ��
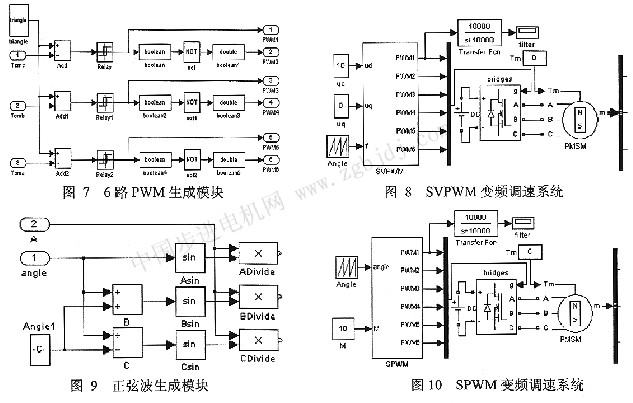
�ڵõ�ԓ�{�Ʋ�ģ�K���ٌ����c���Dz�����ģ�K�M�б��^�����Եõ���·SVPWM���քe
����·��׃����Ϙ�ۣ���������۵�ͨ����û��aԭ�t���M���õ���·SVPWM��������ģ�K��D7��ʾ��
�Ķ����Եõ�svPWM����ʽ׃�l�{��ϵ�y��D8��ʾ��
���У���׃��Ҳ���÷����Ԏ��Ę��·�����������{�Ʋ�����D9��ʾ��
�t���Եõ�sPWM����ʽ׃�l�{��ϵ�y�ķ���ģ�ͣ���D10��ʾ��
���^�D8�c�D10�Ѓɂ�PWM����ģ�K���D8�У� 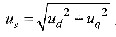 ��ֻҪ��ֵ���C��0��  �����ȼ��ɡ��ڈD10�У�M��ݔ������Ҳ��ķ�ֵ���䷶����0���D  �ķ����ȡ��ڱ����У�ֱ������Դ��늉���24 v�� 3���Y��������
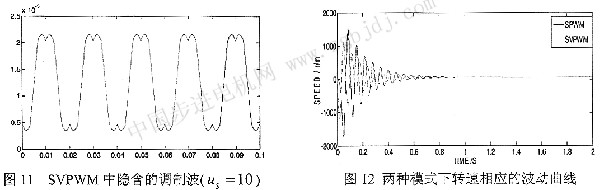
ͨ�^�������������ķ���ģ�ͣ��M�з��挍���l�FSVPWM�{�Ʒ����е��[�����{�Ʋ����Ξ���D1l��ʾ���R���β���
��ͬһ��ϵ�y�У����ɷN�{�Ʒ�ʽ��늙C���D�������M�б��^�����нo���D�ٞ�60�D����犣����Ժ����@���������ӕr��SPWM�{��ģʽ�£�늙C�D�ٵ���ʎ��ֵҪ��SVPWMģʽ�´���D12��ʾ��
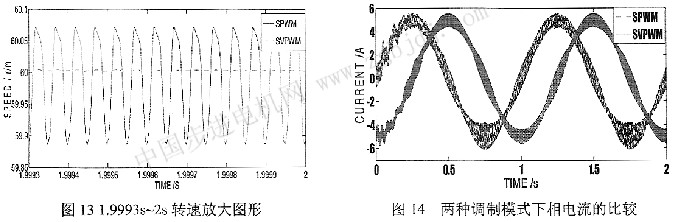
���˸��ñ��^�ڷ��B��r�£��ɷN���Ό�늙C�\�ӵ�Ӱ푣��،�����ĩ���M�зŴ�Ҋ��SPWMģʽ�£�늙C���D����ʎҪ��SVPWMģʽ�´���D13��ʾ��
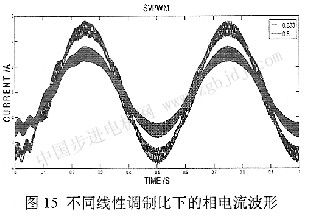
�D14�У��o�����D�ٞ�60r/min�����d�\�У��ھ����{�Ʊȶ���O.833����r�£��õ���A�����������ڃɷN�{�Ʒ�ʽ�µIJ��Ρ�
���ϱ��^�f��SPWM�{�Ʒ�ʽ�µ������Ҫ��SVPWMģʽ�´��M����ӳ����ǰ�ߵ�늉��������^���ߵ͡�
�ڽo��24 V���Դ����ؓ�d���D�ٱ��ֲ�׃��ǰ���£�ͨ�^��׃SVFWM�еľ����{�Ʊȣ��ÃɷN�l���µ����������D15��ʾ��
��ʽ(13)��������������_����****ֵԽ��늙C��늴��D�ؿ����_����****ֵԽ����ˣ��S�������{�Ʊȵ�����늙C����Ҳ����ߡ�
4���YՓ
����ͨ�^������׃�l�{��ϵ�y�У��քe��SVfWM�cSPWM���a����׃늈����ӿ��ı�늙C�D�ӵČ������ɷN�{�Ʒ��������ܣ�ͨ�^������Y���ķ������Եó���F�YՓ��
(1)���D�ٵķ��沨������SVPwM�^SPWM���Ը��������D���}��ͬ�rʹ늙C���Ը����_���o���D�٣�
(2)��������IJ��α��^������SVPWM�^SPWM��늉��������ʸߣ�һ������F������и����ľ��ԜY�Ʒ�����߀���F����ͬ���{�Ʊ���,SVPWM���Ƶ��������ЧֵҪ��С��
(3)�ڽo��늉���ֵ��׃�Լ����B�l���£������{�Ʊ�Խ�ߣ�������ķ�ֵԽ�Ķ�늙C�ij���Խ��
�����īI
[1]��Ŀȫ��Ф���ߣ�������ϡ�����ſ��ı��D��ֱ���ŷ��C���c����ˇ����[J].��ꖶ��I�ˌW�W��1994�� 16(1):7lһ75.
[2]ꐇ�������������׃�Q���g[M]�������Ї����������,2004.
[3]��־������.ͬ��늄әC�{��ϵ�y[M]�������CеL�I������,2001
[4]�����h�F������늙C��Փ�c�OӋ[M],�������Cе���I�����磬2008
[5]ꐽ�.MATIAB����[M].��������ӹ��I������,2008
���ߺ��飺�����(1984-)���У��Tʿ�о������о����������늙C������ơ� |