����B00st׃�Q�ğoˢֱ��늄��i�����о�
�R���䣬��̣��T��
(�������I��W��ꃃ�����710129)
ժҪ�����½�B�˷N�ɟoˢֱ��늄әC���U���әC���M�ɵ�늄��i����ϵ�y��ϵ�y����λ�á��ٶȡ�������]�h���ƣ�����ᘌ����̌��`���i�N�Σ����^�̿����������^�����������늄��i�o�����������Ć��}������Boost�·���F����늉�����ʹ늙C��������(���D����)�^�̕r�g�����������Ķ����F�i�NѸ�ٵİΣ��������Փ�Ľ�����ϵ�y�Ă��f��������������ϵ�y�M���˷��档�Y��������ԓ����ϵ�y�����^����A�S푑����Ժ��^�ߵľ��ȡ�
�P�I�~���oˢֱ��늄әC��늄��i��B00st�·������
0����
늄��iͨ��������Ҫ�ԄӶ�λ���i�o���p�����Ҿ���һ��������ֱ���\�ӈ���[1]����ֱ���C��������������ܡ��w�����әC�����i���b�õȡ��oˢֱ��늄әC(Brushless DC Motor�����QBLDCM)�����w�eС�������p�����ƾ��ȸߵȃ��c�V��������܇�v�ӡ��C���˵��I��ǰ�����Ⱥ��պ����I�����в���ֱ��늄�����ϵ�y���������������w�C߀������ˢֱ��늙C������ЙC�������˝M���w�C늄��i���ӵĸ��������˷���Δ��l���������Dʹ��ˢ늙C�ˢ�������ͣ����������w�C�����b��ʧ�`�Ȇ��}�����Ľ�B��һ�N����BLDCM���U���әC���M�ɵ�늄��i����ϵ�y��ԓ늄��i�ßoˢֱ��늙C���ƿ˷�����ˢֱ��늙C�IJ��㣬�����ϵ�y�Ŀɿ��ԣ��m������һ���w�C�`�����ӵ�����
ᘌ�ϵ�y��늄��i�\�����Ե�Ҫ����ھ�BLDCM�Ĺ������ԣ�����Boost�·���F�i�N����İΣ����_������������Matlab������ϵ�y�M�з��棬�Y����C��ģ�͵����_�Լ�����ϵ�y����Ч�ԡ�ͬ�rҲ����ԓ늄��i����ϵ�y�Ɍ��F�i�N�Ŀ��ٰΣ������ӺͶ�λ���ƣ��M��늙C�l���������D��Ҫ���Ҿ����^���푑����ԡ�
1 B005t׃�Q
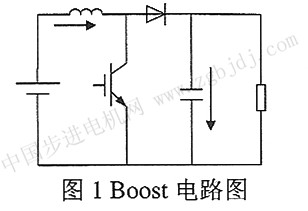
Boost�·��һ�NDC-DC׃�Q�·�������w�eС���Y�����Ρ�׃�QЧ�ʸߵȃ��c��������ؓ��·��D1��ʾ��
Boost׃�Q���ɹ����_�PS������늸�L���m�����O��VD���V�����c��ؓ�d���R���Դ늉�Uin���M�ɡ���S̎��ͨ�B�r���ԴUin��늸�L��늣������������㶨��il��ͬ�r���C�ϵ�늉���ؓ�dR��늣�����c��ֵ�ܴ�������ݔ��늉�u�����ֵ����s̎�ڔ��B�r��Uin��L��ͬ�����C��늣�����ؓ�d���ǹ�����[2-3]���OD��ռ�ձ�(��ͨ��)��ݔ��늉�U��������ʽӋ��:
ʽ(1)�е�D��l��ݔ��늉�U�������Դ늉�Uin�ʷQ�������ز��·�����H�����^���У������ⲿ�Դ�Ĺ���늉�Uin��Boost�·����������oˢ늙C��׃����늙C�D�ӡ�
���˿˷����������i�������غϲ���������ɵ��^��������������i�N�Σ������^��Ć��}������Boost�����·�ڲ�ͬ��B�����늙C����늉���ʹ늙C˲�gݔ�����������(���D)���أ������i�N�a��С�\�Ӻ����ڼ������ĜpС��늙CѸ�ٹ�����������B��ֱ����λ������λ��(��ȫ�����γ�)��Boost�·���������ɂ�������B��(1)�]�i��B�����i�N���������i������]�i�����r�����^����������ã�����Boost�·���늙C����늉���(2)�_�i��B����늙C����������늉����Ӻ�һ���r�g���i�N�]���\�Ӱl�����˕r��Boost�·����늙C����늉���
2늄��iģ�͵ĵĽ���
2��1���]�h���Ʋ���
늄��i����ϵ�y����λ�á��ٶȡ�������]�h�Ŀ��Ʋ��ԡ�����ͨPID�������У�����e�֭h��Ŀ���Ǟ��������o���߿��ƾ��ȡ������^�̵Ć��ӡ��Y�����������p�O���r���̕r�g��ϵ�yݔ���кܴ�ƫ������PID�\��ķe�ַe�ۣ���ʹ����ϵ�y�^��ij��{����������h��푑��ٶȺܿ죬��˲��÷e�ַ��x��PI�����㷨�����]�������֭h�����Ա��������ӵļ����������h����ʎ[4]���@�ӼȜpС������h�ij��{�����֜pС�o�B�`�����˿��ƾ��ȡ�PID����������̖������ɸ���ϵ�y�ӑB���ԣ���Ҳ�������M���l�ɔ_�������㷨�м����ͨ�V������ʹϵ�y���ܵõ����ơ�������ϵ�y�У�λ�ã��ٶȭh�{�������ò���ȫ�ֵ�PI�����㷨���Կ˷��`��_��ͻ׃�r�����ɵIJ��㡣
2.2�U����
�U�������U��݆�M�ɣ������ڂ��f���g���e90�����S�g���\�ӻ����ӣ���p�������ֶȼ������\�әC���ȡ��䃞�c�ǂ��ӱȴY���o��������ƽ������һ���l���¿Ɍ��F���i�衣��ϵ�y��BLDCM���U�C����늙C�����D�\���D�Q��늄��i�ƗU���p��ֱ���\�ӡ�����늙C���D�Ƕȼ��U�C�����ӱȓQ�㣬�ɵõ��ƗUֱ��λ���г���ʽ���£�
ʽ�У�s��늄��i�ƗU�\�е�ֱ��λ�ƣ��Ȟ�늙C�D�^��늽Ƕȣ�p���U�ݾࣻL��z�U������i����ӱȡ�
2.3 �oˢֱ��늄��i�Ă��f����
���ڟoˢֱ��늙C����늘л�·��˲�B���̣�
ʽ�У�U��ֱ��늙C���늉���n��ֱ��늙C�D�٣�La��늘�늸У�ia��늘�˲�B�����Ra��늘Ѓ��裻Ke�鷴늄ݳ�����
���ɟoˢֱ��늙C���D��ƽ�ⷽ�̣�
��������ϵ�y�\�ӷ����У�
���У�  ��ϵ�y���\�ӑT����ʽ�У�T e��늴��D�أ�T L��ؓ�d�D�أ�J o�����D�w�D�ӑT��������ճ��ϵ����GD 2���ۺϵ��D���ϵĿ��w݆��(�������әC���Ȼ��D����)��g���������ٶȡ� ��늴��D�ر��_ʽ����ʽ(5)�ɵã�
������������r�£�늙C�����Ҏ������ֵ�ԃȣ�늙C��һ�Nλ�á��ٶȡ�������]�h����ϵ�y����(3)��(6)��ʽ�M��Laplace׃�Q�������ƌ����ڿ��d��r��(��TL=O)ݔ���
늉�U��ݔ������ٶȦؕr�ğoˢֱ��늄әC���f������
ʽ�У�Ta��늚�r�g������
����{�������÷e�ַ��x��PI���ƣ�λ��/�ٶ��{�������ò���ȫ�ֵ�PI���ƣ��ɵ�����f����AT����WT��ST��������׃�Q���cFWM�Ŵ���һ������Կ��ɱ����h���������c��׃��һ���յ͑T���T�ԭh�������]������f������
ʽ�У�Ks��������Boost�·�ؓ�Y���Ŵ���Tys�b����׃���r�g������
���늙C���ٶ��c��λ�Ƶ��Pϵ���=d�ȣ�dt����������f�����飺
��������������r�����]�h�ğoˢֱ��늄��iϵ�y�Ă��f�����飺
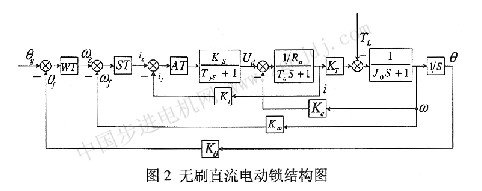
�C���������oˢֱ��늄��i�ĽY����D��D2��ʾ�����У�K����λ�÷���ϵ����K�����ٶȷ���ϵ����
3 ����Y��
ϵ�y���慢���飺늙C�~��늉�24V���~���D��5000 r��min���O����2��늸��c����֮��0��286mH����늄�ϵ��0��04v��s��rad�����O��5�������ӱ�50��1���z�U����2���U�ݾ�2m��Boost�·�ă���늸�O��1 mH��Boost�·�ĞV�����O.1mF��
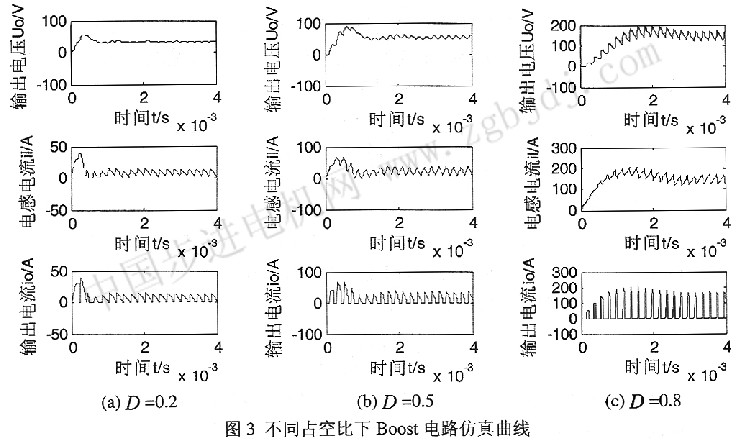
�x���m����С�ĞV�����C�̓���늸�L���Լ�IGBT���_�P�l�ʿ�ʹ�Դݔ���ļy�����С[6]�������·������Boost׃�Q���M���˷��棬����ݔ��늉�U����늸����il�Լ�ݔ�����io�ķ����������^���룬�ڲ�ͬռ�ձ�D�·���Y���c��ʽ(1)��Ӌ��ֵ�����Ǻϣ����Ԍ��F����늙C����늉���������D3��ʾ��
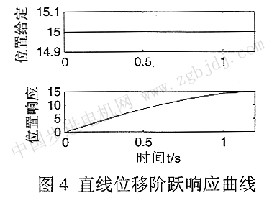
�Y����������ģ�ͣ����oˢֱ��늄��iϵ�y�����Matlab��Sireulink�ķ���ģ�͡�����늄��i���A�S푑����Ե�Ҫ�����c���������A�S��̖�µĄӑB���Σ�����C�OӋ˼·�Ŀ����ԡ�ᘌ�늄��i���_�r(��늙C���D)����15mm�A�S��̖�o�����M��늄��i��λ��푑����棬�Y������늄��i������ϵ�yҪ��ĕr�g������_�i������푑������^�ã���D4��ʾ��
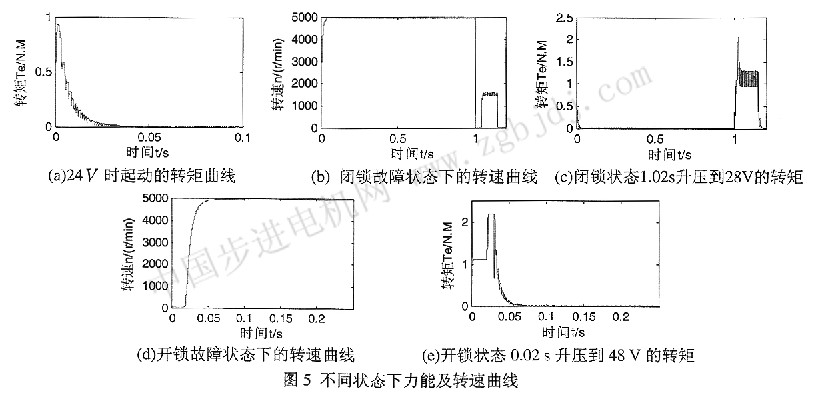
��24 v늉����ӣ������D�؞�0��9 N��m (�D5_1��ʾ)�����^�U���������U������43 N��ͬ�r���O늄��i���ƗU�����O�ޞ�86 N(�J��86N�������Կ˷��i�N�c�i��֮�g�ļ����������F늄��i�_���]����)������������ϵ�y���m�Ϲ����ڸ����@���O��������r��
��ʽ(3)�ɵã�늙C����˲�g��늙C�D�ٞ��㣬�i�N���o�\�ӣ��ڛ]���D�ٵ���r��ͻȻ��߹���늉���ʹ��늘����ia�ɱ�������λ��e�ϵ�����ܶ����ӡ����i�N�����^���������Õr�x������������늉��ăɱ���늘����iaҲ������δ����ǰ�ăɱ������늙C�������D�ؽ���������δ����ǰ�ăɱ���������늄��i�U��������86 N�����i�N����Σ����ṩ���ϡ����늙C�L�r�g�����ڃɱ��~��늉��Ġ�B�t����ʹ늙C�@�M�l�ᣬ��˲�g�a����늙C�l����ԓp��늙C���ڌ��H늄��i����ϵ�y�OӋ�У��x���m���Ĺ����Д��ӕr�r���Լ�Boost�·���m�Ĺ����r�g�ГQ�c���^��Ҫ���Ա��C��������F�i�N�Σ����������r�£�����늙C�a���p�ġ�
��Boost׃�Q���������i�N�Σ���ɷN������B�M���˷��棬�o�����i�N��(�_�i)����(�]�i)�^�̵����ܼ������������D����������D5��ʾ��
�]�i��B����D5b��ʾ��ϵ�y��������ls��늙C�D��ͻȻ�����@�½���O��02 s��(��ϵ�y����1.02 s)�J���i�N�����^����������˕r���������·��늙C����늉�24 v������48 v����D5c��ʾ늙C���D��Ѹ����ߵ�2 N��m��ͬ�r늙C���D�ٶ̕r�g�����(�D5b)�����i�N��ȫ������D���½����㡣
�_�i��B���D5d��ʾ��늙C��24v늉�����O.02 s���������_ʼ��O��02 s�ȵĕr�g�������D�؞�1 N��m(�D5-5)�������i�N�]���\��(늙C�D����Ȼ����)���J��ϵ�y���F���ϡ��˕r��늙C����늉���24 V����48 v�����Կ��������D��������������2 N��m���˷����������F�i�N�γ��������S��늙C�D�ٵ������D����u�½���
��Ҋ����Boost�·��ʹ�ÿ��Ԟ�oˢֱ��늙C�ṩ������������أ����Q늄��i���_���]�^�����������i�N�Σ��冖�}��һ�������á�
 4 �YՓ ᘌ����̌��`�п���������늄��i�i�N�Σ��岻����Ć��}�����������һ�N����BooSt׃�Q���ğoˢֱ��늄��iϵ�y�Ŀ��Ʒ����������ý����λ�á��ٶȡ�������]�h�Ŀ��Ʋ��Ԍ�ԓ�����M���˷���yԇ���Y�����������η�����Փ������ϵ�y�����^���푑����Ժ��^�õķ����ԣ�һ���̶��Ͻ�Q���i�N�Σ���Ĺ��φ��}�����ҿ��Ա��C��Ҫ��ĕr�g���^���_�����ֱ��λ�Ƶ��\�ӡ����錍�H늄��i����ϵ�y���OӋ�Լ�늄��i���ܵ������ṩ���µ�˼·��
�����īI
[1]�ʸ��������R���䣬��ˮ�������ԄӶ�λ�ĺ��՟oˢ�A��ֱ������ϵ�y[J]_Ӌ��C�y���c���ƣ�2006��14(5): 630-633
[2]���װ����S���������Ӽ��g[M]���������Cе���I�����磬2005��9
[3]��ռ�ɣ��������_�P�Դ��ԭ���c�OӋ(��ӆ��)[M]��������ӹ��I���磬2004
[4]��ѩ÷���Z��⣬�T�в�ֱ���oˢ늙Cλ�ø�ۙ�ŷ�ϵ�y�OӋ�c����[J]Ӌ��C���棬2008��11(25)��297-301
[5]�Ό��������Cе�OӋ���A[M]�����I�������I���I��W�����磬2004.
[6]�O�l�|��BOOST�Դ׃�Q��ԭ���c����[J]Ӌ��C���棬2003��4(20)��118-119��122.
���ߺ��飺�R����(1963-)�����ڣ���ʿ����������Ҫ����늙C������Ƽ��g�������Ӽ��g���Դ׃�Q��
�g�ȷ���Ľ̌W�c�о�������
���(1985��)���Tʿ�о������о������oˢֱ��늙C������Ƽ��g��
�T��(1983��)����ʿ�о������о������ϡ������늙C������Ƽ��g�� |