| ����늙C�D�����Ե��о�
ժҪ������늙C�����É���մɵ��扺�Ч���������ֱ���D׃�əCе����ܵķN���b�á����нY�����Ρ���ֱ���ӡ�푑��ٶ�r�A�����ƾ��ȸߵ����c�����Ľ�B�˳���늙C�ӿ���ԭ���Լ����D�ӵ�һ�N���|ģ�ͣ�Ȼ��ᘌ��@�N���|ģ�͏���Փ���о����D�����ԣ������^�˃ɷN�����������˼��ĺ��D�ؿ��Ƶ�Ч����
�P�I�~������늙C�����|ģ�ͣ��D�ؿ��ƣ���һ�����
O����
����늙Cfultrasonic M0tor�����QuSMl��ͬ��һ���늴�늙C�������É���մ�(PleZO��electric ceramic)���е��扺�Ч�������ڽ�׃늈������£�����մɕ��a����s�F��ͨ�^���N��s���ģʽ���D�Q�c��ϣ������ֱ���D׃�əCе����ܣ�������Ħ���D׃�����D(�������\�ӷ�ʽ)�Cе�ܵ����b��
Ŀǰ��õij���늙C��h���в��ͳ���늙C(Ring��tvpe Traveling��wave ultrasonicMotom���QR��wusM)����Y�����c�Ƕ��Ӻ��D�Ӿ���һ���A�h��ʹ������늙C�Y���ʱ�A�h�Ρ�����IJ������ɉ���մɺ͏����w�M�ɵĶ��Ӽ����|��ճ��Ħ�����ϵ��D�ӡ����D����������׃�����a�����S�����o����һ��
�c���y늴�늙C��ȣ�����늙C���S�ચ�صă��c�����ٴ��D�ء�늴ż����Ժá������졢������i���\�Пo����l����J����������M���a����늡�܊������܇�������i�C���˵��I�������V���đ���ǰ����������߳���늙C�đ���ˮƽ����չ����늙C�đ����I��H������Ҫ�ӿ쌦����늙C˲�B���Եķ������о�������˲�B������Ҫ���о����D��׃�������c��ʹ�ܿ��������Ӻ�ֹͣ��푑��r�g��������ۙ܉�E�\�ӕr���ٶȿ��ƿ���ͨ�^�о��D�����ԁ팍�F��1����늙C�\�ӷ���
�h���в��ͳ���늙C�\�еĻ���ԭ�������Ã��ཻ׃����늉�����N�ڶ����ϵĉ���մ��Юa�������Ƅӵ��в���ͨ�^���D�ӽ��|��Ħ�������D���D�ӡ�
�����ϵĉ���մ������օ^�O�������෴����늉������£�������늷օ^ͨ�^���P�ĉ���մɵķ��㉺�ϵ�����քe�쏈���տs���Ķ����l�M���L���쏈���տs���ģ�������ڶ��ӏ����w
�м����������ӣ����ډ���w��һ������̖�����£�һ��ֻ�ܫ@���v���ֲ�����ʹ�Æ��ཻ׃늉������մɭhA�^����B�^��ֻ���ڶ��ӭh�м��l����һ���v����ӣ���ʹ�Ã��ཻ
׃늉�ͬ�r����A�^��B�^����һ���l���¯B�Ӿ�jJ���ڶ��ӭh�м��l���в���ӡ������C�����в��������¶��ӱ�����|�c���E�A�\�ӿڡ�
�D���ٶȣ����������¹�ʽ��ʾ
���о���A���B����ӵ��������=2�ڣ��֞鏗�Բ���ӵIJ�����h�鶨���ϱ��浽���Ԍӵľ��x(���N�ڶ���I�ĉ���մɺ�ȵ�һ��)���۞�A�ࡢB�����g����λ�
���в�����늙C�Y���OӋ��ɺ�^��h�_�������Էքeͨ�^�{������մɵă��༤��늉��ķ�ֵ�u��A��B����֮�g��λ����Լ����l�ʏS���{���в������c���ٶȁ������D�ӵ��D
���ٶȡ�ݔ���D�ء������Ҋ�����N���Ʒ������{�l���{����{����
2���D�ӽ��|ģ��
���ڶ�������Ӡ�B�£������|�c�\�Ӿ��ЙM��λ�ƺͿv���ٶȣ�ʹ����ͨ�^Ħ�������D���D�ӳɞ���ܡ�ͨ�^���в�����늙C���D�ӽ��|�����Եķ����������Mһ�����о����D���g���Ă��f�C����
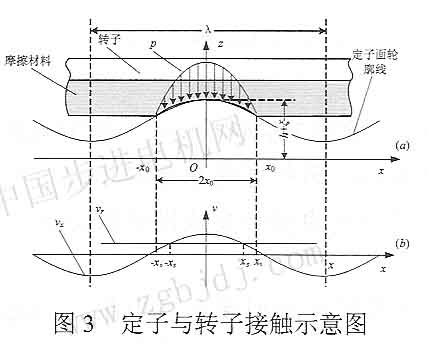
��������Ӟ������в��r����ʽw(x����)=һ��cos(ū+��f) �������ڴ���r�£������в�������c�r�g�o�P�����B���в����Π�ֲ�׃���麆����������ȡf��z�r�̶��Ӻ��D�� �����L�Ľ��|���M�з�������D3(a)��ʾ���ڴ˕r���ӷ��̞飺
�D4�У��Զ���δ��׃�r���Ԍӵ�λ������M�S��(һx0��x0)�鶨�D�ӽ��|�^�������ú�Ɲ���|ģ�ʹ_�����|�^�ȡ��D4(b)�鶨�ӱ����|�c�v���ٶ�vx�ֲ��������O�D���ٶȞ�vr��
��xs��vx=vr���|�cλ�á����ڿv���ٶ�vx��Yr���|�c��K�D���D�ӣ����v���ٶ�vx>vr���|�c�Ƅ��D���D�ӡ��|�c���ƄӺ��ӵ����ÿ���ͨ�^��̖�������_��
 �ڌ��H��Ħ�����Ͼ���ճ������(stick��slip)������ճ�����Ե����Å^����^С�H��vu̎�����Ğ麆��������������Ħ�����ϵ�ճ���ԡ�ʽ(2��3)�Ю���x)����1��ʾ���ӱ����|�c�����Ƅ����ã�ԓ�^�g�Q���Ӆ^����x)����һ1��ʾ���ӱ����|�c��(һ��һx��)��(z0)�ȣ�����K���ã��Q���ƄӅ^�� �ڌ��H��Ħ�����Ͼ���ճ������(stick��slip)������ճ�����Ե����Å^����^С�H��vu̎�����Ğ麆��������������Ħ�����ϵ�ճ���ԡ�ʽ(2��3)�Ю���x)����1��ʾ���ӱ����|�c�����Ƅ����ã�ԓ�^�g�Q���Ӆ^����x)����һ1��ʾ���ӱ����|�c��(һ��һx��)��(z0)�ȣ�����K���ã��Q���ƄӅ^��
�ڌ��в�����늙C�Ľ��|����r�M�з����r��ͨ����Ħ�����ϵ�Ч��һ��������С��ڽ��|��ȣ����ڶ��ӱ����|�c�ęM��λ����ɶ����c�D�ӆ��ĉ���׃���������ֲ�������ʽ(4)
ʾ��

ԓʽ�У��ٞ�Ħ�����ϵď��Ԅ��ȡ��ݡ���J�����ֲ������������D�Ӊ�������֪�r����ɶ��D��Z������ƽ��l���ƌ����ã��t�������w���D�ӵĿv���Ƅ���ֻ��=2,uk��4PFs(z)p0�{����u��Ħ��ϵ����2kr(sinto��kxo COS��)2~zk��4p F sgn(����#cos��--Vr)(c��s��COS~o)dx
������̖�����oֵ�l��������ʽ�ֶηe�ֵ�

���X���D���D��w���ĺ�����������ʽ���H�ϼ��鳬��늙C�D��һ�D�ط��̣���}ذ��ʽ(12)���Եó����½YՓ��1)ݔ���D���Ƕ��D�ӵ��A����t���D���D�٣��ĺ�����2)�{�������Դ��׃���ӱ����в�����̎�|�c��****�����ٶȣ�����ݔ���D�خa��Ӱ푣�
3����늙C�D������
�������в��ͳ���늙C�Y�����\��ԭ��������֪�����Ã�����l����늉�������늙C���{������늉����l�ʡ���λ����Ԍ�늙C�M���D�ؿ��ơ�F����60ram�в��ͳ���늙C��������
���в�����늙C���B�r�ęCе���ԡ�
3 1�{���l��
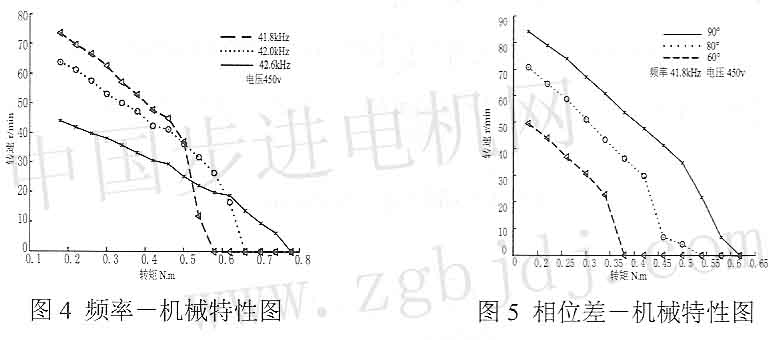
�ڹ̶�������늉���λ���90�ȣ�늉���ֵ��450V���{������늉��l����41��8KHz��42 OKHz��42 6KHz��r�£��ڲ�ͬ�D����r���D�ٵ�׃�����B�D����Dzi P��)r~����
���l��һ�Cе���ԈDl���Կ���������늙C���D��Խ�͕r�D��Խ���@��dz���늙C��늴�늙C�IJ�ͬ�c֮һ������늙C���D������0���R���D����֮�g�r��늴��D��Խ��r�D��Խ��
���_���R���D���ʕr�_��****ֵ������늙C���ٴ��D�ص������ڈD���܉�ܺõ��w�F�����l��һ�Cе���ԈD���Կ�������ؓ�d�D���^��r(����0��4Nm)���D���½�ֱ��늙Cͣ�D���ڲ�ͬ�l���³���늙C�ڷ��B�r���܉��_�����߽ӽ��O���D�ء���ؓ�d�D���^С�r(С��0 4Nm)�����l���^С�r늙C���D��Խ�ߣ��l��Խ��늙C�D��Խ�͡�
3��2�{�����
�ڹ̶�������늉��l�ʞ�41 8kHz��늉���ֵ��450v���{������늉���λ��քe��90�ȡ�80�Ⱥ�60����r�£��ڲ�ͬ�D����rF�D�ٵ�׃���D����D5ʾ������λ��һ�Cе���ԈD�Ͽ�
�Կ���������ͬ�ٶ��£�����늉���λ��Խ��r�D��Խ�����ٶ��^С�r�_�����D���^���@�ͮ���늄әC�Ĺ������Դ����෴��
4����늙C�D�ؿ���
���Ϲ����D�����Եķ�����֪��ͨ�^�{������늉����l�ʡ���λ����Ԍ�늙C�M���D�ؿ���������60mm�в�����늙C���������ú��D����һ�����˼�롣
4��1����{��
���D���A�Oֵ��O 3Nm�r��42kHz i����λ���90�ȵ�늉����ӣ����yԇ�D��С��0��3Nm�r���^�mʹ��42kHz������λ���90�ȵ�늉������yԇ�D�س��^0��3Nm�r������늉��ГQ��42kHz FJ,J����λ���ؓ90�ȵ�늉�����������ƣ��D�����A�Oֵ0 3Nm���ӡ����D��׃����˲�B�D��˲�B�D��D6ʾ��˲�B�D����늙C���Ӻ�5��)(��ms�ȵ�
�D��׃����˲�B�D��늙C��������D��׃���D���ĈD��˾�Կ���늙C
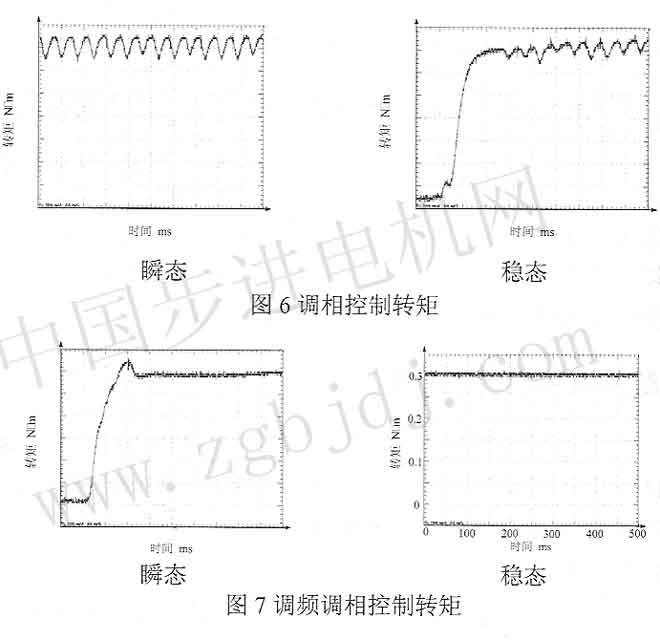
��100ms���M�뷀����B�������r�D�صIJ��ӷ����ڡ�10�ԃȡ�4 2�{�l������
��42kHz������λ���90�ȵ�늉���ӣ����yԇ�D��С��0 3Nm�r���^�mʹ��42kHz�����fλ���90�ȵ�늉������yԇ�D�س��^O 3Nm�r������늉��ГQ��42kHz������λ���22 5ͯ��늉������D��׃����˲�B�D��˲�B�D��D7ʾ��˲�B�r��늙C���ӳ��^�A�Oֵ�����Fһ��ë�̣�늙C�ГQ����λ���22 5�ȵ�늉����D�pС����100ms�r�g�_�����B�����B�r�D�ػ����]�в��ӡ��c��λ���{�����Ч���Ժá�
5�Y�Z
���Ľ�B�˳���늙C�ĽY�����c������r�в�����늙C�Ĺ���ԭ������ͨ�^�����D�˵Ľ��|ģ�͵��о��ó��˳����D�����ԣ������õ���һ����Ʊ��^�˃ɷN�D�ؿ��Ƶ�Ч������
�ڳ���늙C�漰���Cе����W���W��������W�����όW��Ħ���W�������Ӽ����Ƶȶ��W��
�I�C����������Փģ�ͽY�����s����H�ڹ����r�ǡ����Ǿ��Ժ͕r׃�Ե�ϵ�y����˱��Č�����늙C�D�ؿ��Ƶ��о�ֻ��һ�����T����ģ�ͽ����Ϳ��Ʋ�����߀�кܴ�ĸ��M���g��
�����īI
|











