| �o���|��׃λ�÷�������늙C�M��һ�w���O(sh��)Ӌ
ժҪ�����½�B���ԟo���|���D(zhu��n)׃������λ�÷����ij���늙C�M����һ�w���O(sh��)Ӌ��ԓ�B�������w�eС���ܸߡ��������܃�(y��u)Խ���ɿ����õă�(y��u)�c���f���O(sh��)Ӌ���_����ˇ���С�
�P(gu��n)�I�~������늄әC���o���|��׃�� �w���O(sh��)Ӌ
O����
����늙C�����É���մɲ��ϵ��扺�Ч��(y��ng)���F(xi��n)�D(zhu��n)�ӵġ��N����늙C��ͬ���y(t��ng)��늴��R�_���o��R�_���^���������������c���Y(ji��)��(g��u)���Ρ�����С�ͻ����D(zhu��n)�ٵ͡������ܶȴ���Ҫ�p��
�C��(g��u)��ֱ���(q��)��ؓ�d���T��С��푑�(y��ng)�졢�������ܺá���λ���ȸߣ����ܴň�Ӱ푡�ͬ�r늲��a(ch��n)���ň�������Ҫ���������\�а��o�o�����ȡ�����ȫ����ȡ�����y(t��ng)����ϵ�y(t��ng)�е��ŷ��Cһһ�X݆���p����һһ�Ƅ�����λһ�w�ĽM�ϣ������w�e�������@�ă�(y��u)�ݣ��������b���Ќ����õ�������(y��ng)�á�����늙C���˙z�yλ����̖һ����ù�Ş鷴��Ԫ�������D(zhu��n)׃��������λ�÷���Ԫ����������^���Эh(hu��n)���m��(y��ng)�Ժã��ɿ��Ըߣ��ض��m��(y��ng)�ԏ������c��һ������ʹ�íh(hu��n)�����^���ӵėl���¡����Ľ�B��һ�N�ԟo���|���D(zhu��n)׃������λ�÷���Ԫ���ij���늙C�M����һ�w���O(sh��)Ӌ������
1һ�w�������O(sh��)Ӌ
�����M���ɷ֞鳬��늙C��λ�÷����ɂ����֡�
����늙C�����LJ���(n��i)�о����^�磬�F(xi��n)��Ҳ�������Ģ�60mm�h(hu��n)���в�����늄әC��λ�÷���������һ���ΘO�ğo���|���D(zhu��n)׃����������׃���÷��bʽ�O(sh��)Ӌ��������늙C���S��ֱ��
���L������׃�D(zhu��n)��ֱ�ӹ̶����D(zhu��n)�S�ϣ���������늙C���ֵęC���Ͻo��׃���������bλ�á��M���Y(ji��)��(g��u)�D��Dl��ʾ��
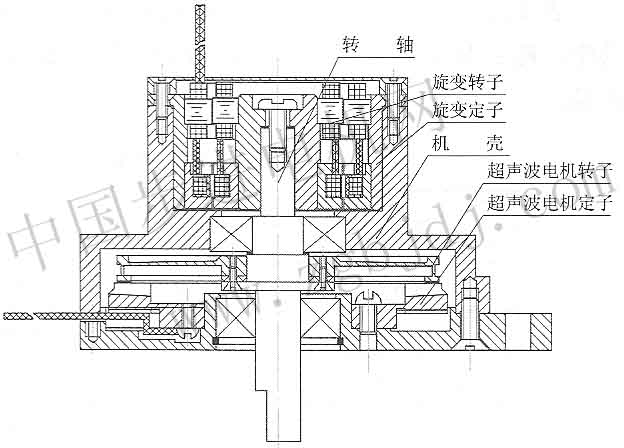
�D1����늙C�M���Y(ji��)��(g��u)�D
����׃�M�з��wʽ�O(sh��)Ӌ�����b�������У�늙C�M���\�а�ȫ��j��������׃����(sh��)�����Ƚ�(j��ng)�yԇ�_��ָ�˺����c����늙C���B���@�N�Y(ji��)��(g��u)�����ˌ���׃�ͳ���늄әC���������w��ɽ��һ�����ϸ����ɵ����M���x����r����׃�O(sh��)Ӌ�ɽM�bʽ�Y(ji��)��(g��u)�����B�S�������c늙C�B����ɵIJ�ͬ�ĺ͏������ӣ�ͬ�rҲ���ڜp���w�e��ԓ�N�M���Y(ji��)��(g��u)�m���ڹ��̻����a(ch��n)��
1 1����늙C�Y(ji��)��(g��u)�O(sh��)Ӌ
늙C���w��Ҫ���ɶ��衢�D(zhu��n)�ӵȲ����M�ɡ������lj���մɺ��C���wճ�Y(ji��)���ɣ��D(zhu��n)�������D(zhu��n)��Ƭ��ճ�Y(ji��)���D(zhu��n)�ӱ����ϵ�Ħ�����ϽM�ɡ���늙C�M���˟o�����O(sh��)Ӌ����������늄әC���{(di��o)��(ji��)
늙C�����r�����D(zhu��n)���ϼӵ��ɵ��k���������ɼӹ��y�ȱ��^�ߴ��Լ����Զ����^�y���ơ��F(xi��n)�����D(zhu��n)�ӵ���׃ֱ�Ӯa(ch��n)��������ͨ�^�{(di��o)��(ji��)�D(zhu��n)��Ƭ��׃�������{(di��o)��(ji��)늙C���A�o�����D(zhu��n)��Ƭ������ǰ���D(zhu��n)��Ƭ�͵��ɵ��p�����ã��Ķ�ʹ늙C�ܵ��ĉ���������늙C�\�Еr��ƽ��(w��n)��
�C���w�����x���a���~�������~����ԓ�ɷN���Ͻ�(j��ng)��̎����ˇ����иߵď��ȡ����Լ���ĥ�ԡ�
�D(zhu��n)��Ƭ�����x�øߏ���Ӳ�X��Lc4 cs����(j��ng)��̎����ˇ������^�ߵď��ԣ��ɷ�ֹ�D(zhu��n)�����ډ����^������^ƣ�ژO����r�a(ch��n)�������D(zhu��n)���c�S���B���ϲ�ȡ���D(zhu��n)���·��̶��D(zhu��n)�S�ķ�ʽ���Ķ�ʹ늙C���S���L�Ȝp�٣��w�e��С��
1 2����մ��x��
����մ��lj�늳��R�_�ĺ��ģ��������ܵ�Ӱ��ش�һ���f�������ڹ������C���B(t��i)�����R�_���f��Ҫ����մɲ��ϝM������Ҫ��
(1)����մɲ��ϵĉ�����ܷ�(w��n)�������ϻ����ܺã�
(2)�����c�^�ߣ������^���Ĝضȷ�����(n��i)������
(3)�Cе���Ⱥã��ڴ����¹��������װl(f��)�����ѣ�
(4)�^�ߵĉ�늳���(sh��)d�����F(xi��n)��늉��(q��)�Ӻʹ��ݔ�����أ�
(5)�ߵęC����ϵ��(sh��)Kn��
(6)�͵Ľ�늓p��tanռֵ���ߵęCеƷ�|(zh��)��(sh��)Q��������߉���մ�������Ч�ʺͽ��͓p�ģ�
(7)�^�������l����
���H�ϣ�Ŀǰ���y��һ�N����մɲ�����ͬ�r�M����������Ҫ���ڌ��Hʹ���У���Ҫ����(j��)��ͬ�Ĉ��Ϻ���Ҫì�܁��x����Ŀǰ���õĉ���մɁ��f������մɿɷ֞�ܛ�ԉ�늲��ϡ�
Ӳ�ԉ�늲����Լ����ܽ���ܛ��Ӳ��֮�g�ĉ�늲��ϡ��ڌ��H��(y��ng)���У��������B�m(x��)�\�D(zhu��n)����늳���늵đ�(y��ng)�íh(hu��n)������Ҫ��p�ıM��С�����ưl(f��)�ᣬ�@�r����Ӳ�ԉ�늲��Ͼͱ��^���m����������Щ�gЪ������ϣ�����^�������l���đ�(y��ng)�ã��x��ܛ�ԉ�늲��Ͽ�ʹ����늙C��������(w��n)����
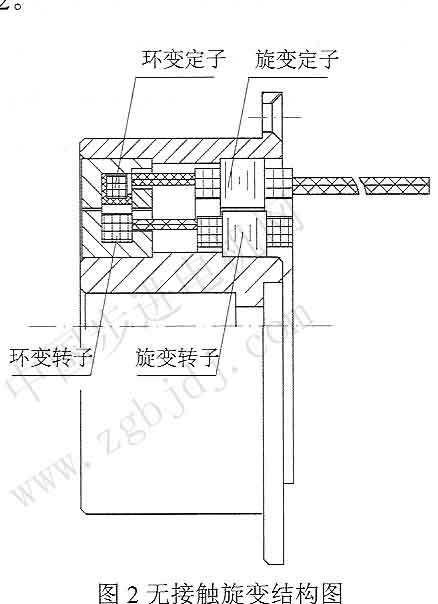
��1��Ŀǰ����(n��i)���R�_��(y��ng)���^��ĉ���մɲ����c�����x�õ��մ�Ƭ����Ҫ���ܱ��^����
���У�K���C����ϵ��(sh��)��e����늳���(sh��)��tanռ����늓p�ģ�Q�����CеƷ�|(zh��)��(sh��)��d�������(sh��)��
1 3Ħ�����ϡ�ճ�Y(ji��)�����x����M
��Ħ������һ��������Ҫ��
1)���к��m��Ħ��ϵ��(sh��)�����c���ӱ�������^�ã�
2)��Ħ�Ժã�
3)���иߵğ᷀(w��n)���ԣ�늙C�ض�׃������r�£����ó��F(xi��n)�����c���B(t��i)������ӬF(xi��n)��Ħ�����ϵ����a(ch��n)��ˇ·���ЌӉ��������취��ճͿ��������Ϳ���Ĵ���͡��Ӊ����m�ڴ���
�����a(ch��n)��ճͿ���m����С�������䷽�{(di��o)�����㣬��������NӲ�ȡ���NĦ��ϵ��(sh��)���䷽���������������g�Ҳ���ճͿ���g(sh��)���Ƴɹ衢�X���ճͿ�ϣ����a�ˇ���(n��i)�հס��ڴ˴������Ќ�ԭ��ճͿ�����M���˸��M���䷽��AF�ߜؘ�֬+NGһ03���Ԅ�+Ħ��ϵ��(sh��)�{(di��o)��(ji��)����+Ӳ���{(di��o)��(ji��)����+KH550����ż(li��n)������ʹ����Ħ������Ħ��ϵ��(sh��)�m�У��ض�׃���r���ܷ�(w��n)����늙C�\�D(zhu��n)ƽ��(w��n)��ȡ�����^�õ�Ч����
늙C�õ�ճ�Y(ji��)���ϣ���Ҫ���ډ���մ��c����w��ճ�Y(ji��)���҂����M���䷽�����������͵�������g��������ż(li��n)�����ڱ��Cճ�Y(ji��)���ȵ�ǰ���£�������ʩ���ȣ�ȡ���˺ܺõ�Ч������C��(j��ng)���ː��ӭh(hu��n)����Ŀǰ�ѽ�(j��ng)�ɹ��đ�(y��ng)����늙C�С����]��늙C���a(ch��n)�Ĺ��̻����҂�߀���zճ����ʹ����ij�νM�֭h(hu��n)���z��Ҳȡ���˲��e��Ч����
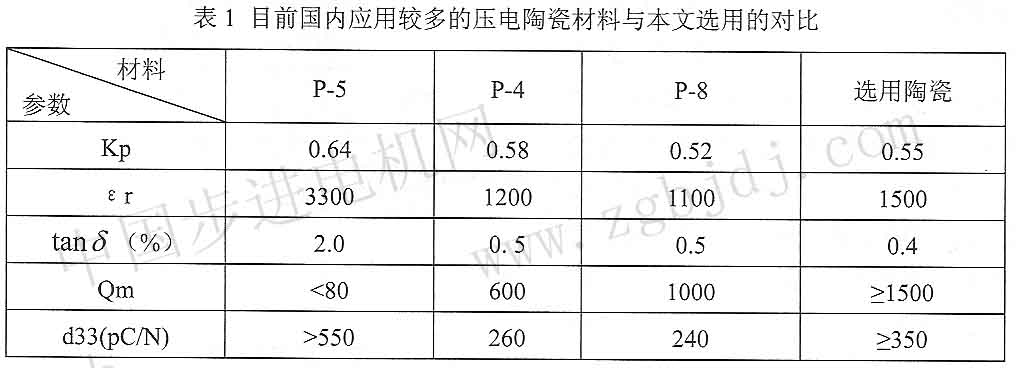
1 4�o���|���D(zhu��n)׃�����O(sh��)Ӌ λ�÷������ֲ��÷��bʽ�o���|���D(zhu��n)׃������Ҋ�D2��
�o���|��׃����׃���ֺͭh(hu��n)��׃�������ֽM�ɣ���׃ݔ����ݔ����·��̖��һ����׃׃���������ˢÓ�x���h(hu��n)���������^���С����ڽ��|���ɿ����ˢÓ�x���h(hu��n)�ĬF(xi��n)���Ӱ���ϵ �y(t��ng)�Ĺ����ɿ��ԡ������ӿɿ��ԣ��҂����ßo���|��׃�������íh(hu��n)��׃����ͨ�^늴ŸБ�(y��ng)�����̖�ɶ��ӷ���ݔ���D(zhu��n)�ӷ���ȡ�����ˢ�����h(hu��n)��
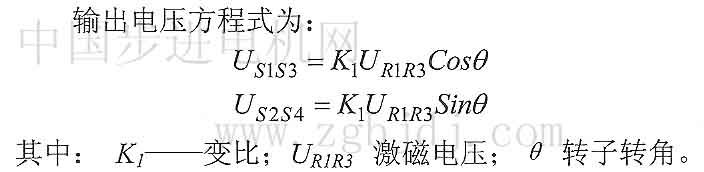
���У�Ы����׃�ȣ���늉���Ŀ�D(zhu��n)���D(zhu��n)�ǡ��h(hu��n)��׃������ԭ��(���ŷ�)����׃�ĸ���(ݔ�� ��)��(g��u)�ɟo���|��׃�Ķ��ӣ�����׃��ԭ���ͭh(hu��n)��׃���������t��(g��u)�ɟoˢ��׃���D(zhu��n)�ӡ���ˣ���̖ݔ���ݔ���˾��ڹ̶����ӵĶ����ϣ����ڭh(hu��n)��׃����������ʹ�ö����D(zhu��n)�ɿ��ԡ����bʽ�o���|��׃߀���а��b��������c��
2�M������
ԓ�M����(j��ng)�c�(q��)�Ӿ�·(li��n)�{(di��o)���_������ָ�ˣ�
ݔ���D(zhu��n)�أ�O��80N��m��ݔ�����d�D(zhu��n)�٣���100rpm��늙CЧ�ʴ��ڰٷ�֮27��
ԓ�M������(j��ng)�^���h(hu��n)��ԇ
��ӣ�һ�l��10~500Hz, i��O��75m�����ٶ�lOO��s��
Ҏ(gu��)���}�_�_������ֵ���ٶ�500m��s z�����m(x��)�r�g(11��I)ms
�ߜأ�+70һ"C��
�͜أ� 50L����
����գ�1��3~10-J��pa��
3�Y(ji��)�Z
���`�C���ԟo���|��׃����λ�÷����ij���늙C�M���w�eС׃))�����ܸߣ��������܃�(y��u)Խ���h(hu��n)���m��(y��ng)�ԏ����ɿ��Ժá�
���Ξ������(�ܢ�70��47(mm)(����׃�����ܺá������������һ�w���O(sh��)Ӌ�������У��c���̌��H�����Ǻϣ����ƏV��(y��ng)Ƭj�ڳ���늙C�M�������̻����a(ch��n)���С�
�����īI
1.���Эh(hu��n)���в�����늄әC��������늙C��2004,3��14~-16
21 ���У�������볬��늙C�㽭��W�����磬1995
3. �������Ħ�����ϵ�����ճ�ӣ�2001��22(3)��7��8
4. ��쳬��늄әC���g(sh��)��(chu��ng)���c���O(sh��)���ھŌ��Ї�С늙C���g(sh��)��ӑ��Փ�ļ���2004 11123��126
5. ���������Ă��Ȼ���DsP�ij���늙C����ϵ�y(t��ng)늹����g(sh��)�W��2004
6. �w��ţ21���o����늙C���g(sh��)չ����ӡ��yԇ�c�\��2000��3)7��12 |











