�A���ζ����ɶȳ���늄әC(j��)�(q��)���·���о�
ժҪ������(j��)�A���ζ����ɶȳ���늄әC(j��)�Ĺ���ԭ�������c(di��n)��������(q��)���·���O(sh��)Ӌ(j��)Ҫ����(j��)��Ҫ�������һ�N�(q��)���·���O(sh��)Ӌ(j��)����������������ԭ�������ԡ�ᘌ�ԓ�O(sh��)Ӌ(j��)�������ڵIJ��㣬���(q��)���·�M(j��n)���˸��M(j��n)���^�õ؝M����늙C(j��)�(q��)�ӺͿ��Ƶ�Ҫ��
�P(gu��n)�I�~����Ŀ�ɶȣ�����늄әC(j��)���(q��)�ӣ����ƣ��·
O����
����늄әC(j��)���(q��)�Ӽ��g(sh��)���S������늄әC(j��)�Įa(ch��n)�����l(f��)չ��ͬ���l(f��)չ������늄әC(j��)�Ĺ���ԭ���c���y(t��ng)��늴�늄әC(j��)��ͬ�����(q��)�ӵķ���Ҳ��ͬ����ˣ�������늄әC(j��)�(q��)�Ӽ��g(sh��)���о�����Ҫ���b늴�늙C(j��)�ķ�������Ҫ���]����늄әC(j��)���������c(di��n)���چ����ɶȳ���늄әC(j��)���(q��)�ӷ�������(n��i)ͬ���ѽ�(j��ng)���˴����ġ��г�Ч���о�����Il��J�����������ɶȳ���늄әC(j��)�(q��)�Ӽ��g(sh��)���о��������^�����������������ƵĈA���ζ����ɶȳ���늄әC(j��)�錦���о�����늄әC(j��)���(q��)���·����ԓ�N늙C(j��)���(q��)�ӺͿ��ƴ�F���A(ch��)��
1�(q��)���·��Ҫ��
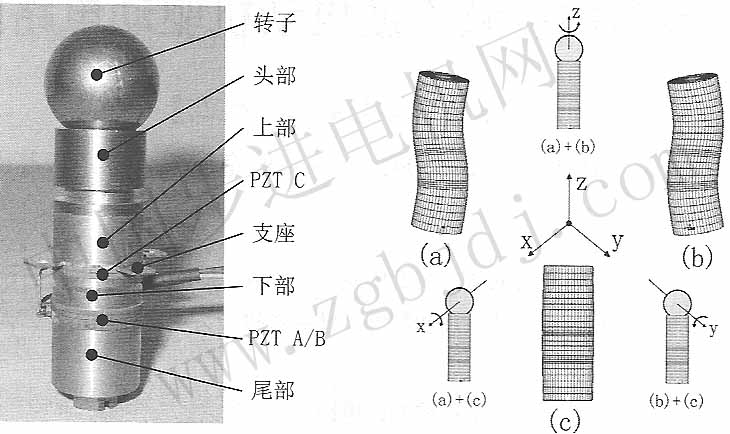
�A���ζ����϶ȳ���늄әC(j��)�ĽY(ji��)��(g��u)��[��ԭ����D1��ʾ�������M����մ�Ԫ��PzT�ݡ�B��c�Ϸքeʩ�Ӻ��m�Ľ���늉��r�����Լ��l(f��)�����ӵ���������ģ�B(t��i)���ɂ����A����ģ�B(t��i)��һ��һ�A�v��ģ�B(t��i)����(d��ng)�ɂ�����(�ڕr�g�����g��λ�Ͼ����90��)�ϳɕr���Ϳ����ڶ��ӵ��(q��)�Ӷ���(�^��)�a(ch��n)���E�A�\(y��n)�ӣ��M(j��n)�����������D(zhu��n)��֮�g��Ħ�����(q��)ʹ�D(zhu��n)���@���S�D(zhu��n)�ӣ�ͬ������(d��ng)һ�������c�����v��(�ڕr�g�����g��λ��������90��)�ϳɕr���͕��(q��)ʹ�D(zhu��n)���@x��y�S�D(zhu��n)һ�ӡ�
һ����r�£�����늄әC(j��)���������l�εĺ��C��̖������(q��)�ӵģ�����ͨ�^�{(di��o)��(ji��)�伤����̖����λ���l�ʺͷ�ֵ֮һ����׃���\(y��n)�Ӡ�B(t��i)���Ĵˣ��ij���늄әC(j��)�\(y��n)�ӿ��ƵĽǶȁ��v�������N�������Ʒ�������λ����ơ��l�ʿ��ƺ�늉���ֵ���ơ���λ����Ƶă�(y��u)�c(di��n)������ƽ����
�ٶ�׃����(sh��)�F(xi��n)�����D(zhu��n)��ijЩ��r������������ٶȷֱ��ʣ�ȱ�c(di��n)�Ǿ��Џ�(qi��ng)�ķǾ��ԡ���Ӳ���Ƕ��v����λ�������Ҫ���T����λ�{(di��o)���·���������{(di��o)��(ji��)���ܵă�·��̖�l(f��)�������������Ʒ�����(f��)�s�öࡣ�l�ʿ�����������(sh��)�F(xi��n)���܉��w�����ٶȷ��������V����(y��ng)�����в��ͳ���늄әC(j��)�Ŀ��ơ��������@�N���������S��(d��)���ظ�׃?n��i)������ģ�B(t��i)�ļ����l�ʣ�������ܪ�(d��)���،�(sh��)�F(xi��n)�����������D(zhu��n)�ٵĿ��ƣ������l�ʿ��Ʋ��m�ڶ����ɶȳ���늄әC(j��)��늉�������ͨ�^��׃����늉��ķ�ֵ����׃��ӵ�������M(j��n)����׃늙C(j��)�D(zhu��n)�ٵĿ��Ʒ�����늉����ƳʬF(xi��n)���õľ������|(zh��)����ȡ�����õĿ���Ч������ʹ���ý�(j��ng)��Ŀ���������PID�������������^�õ������ԡ���˱��Č����{(di��o)��(ji��)늉���ֵ�Ƕȣ��O(sh��)Ӌ(j��)�ͷ��������ɶȳ���늄әC(j��)���(q��)���·��
�D1늙C(j��)�ĽY(ji��)��(g��u)�M�ɺ���ԭ��
����(j��)�A���ζ����ɶȳ���늄әC(j��)�Ĺ���ԭ�������c(di��n)����늉���ֵ���Ƶ���Ҫ�����(q��)���·(��Q�(q��)���Դ)��(y��ng)�M������Ҫ��1)���ṩ�M��늙C(j��)�����l��Ҫ�����·���l�(q��)����̖��2)�ܪ�(d��)�����{(di��o)��(ji��)��·�(q��)����̖��늉���ֵ��3)�ܪ�(d��)���،�(sh��)�F(xi��n)�������ɶ��\(y��n)�ӵĆ��ӡ�ֹͣ�������D(zhu��n)��4)��·�(q��)����̖֮�g��λ���ܱ���ͬ�ࡢ���������(90����270��)��5)���c늙C(j��)ƥ�䣬������(q��)��Ч�ʡ�
2�(q��)���·��������
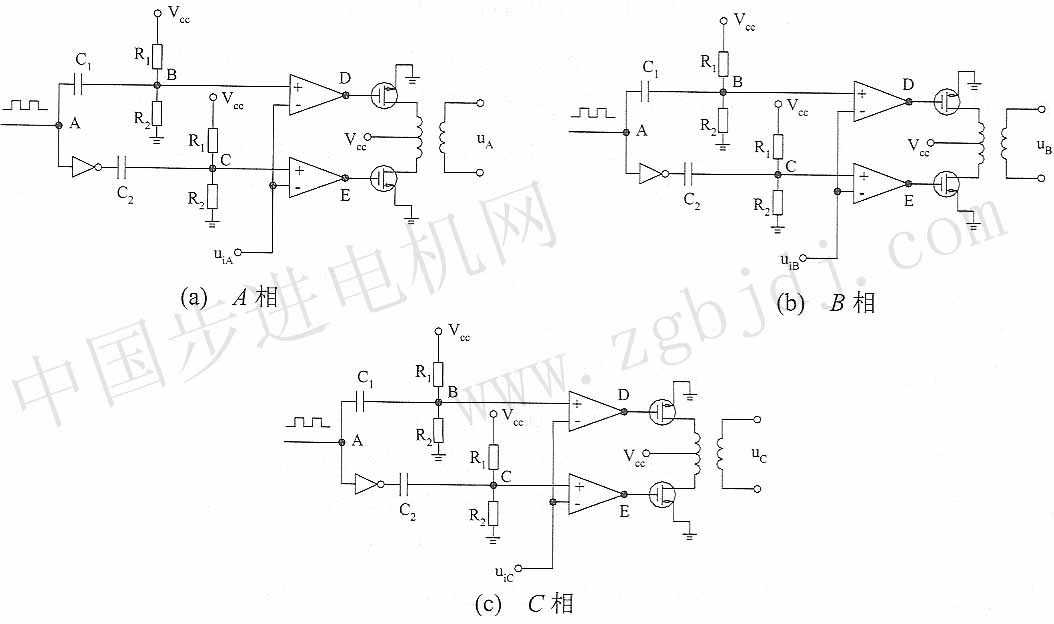
���ՈA���ζ����ɶȳ���늄әC(j��)�(q��)���·������Ҫ�����O(sh��)Ӌ(j��)��ԇ����һ�N�(q��)���·����ԭ����D2��ʾ���@��һ�������ɶȳ���늄әC(j��)�{(di��o)�������·����������ͬ���·ģ�K�M����
�D2�Y���·I������ģ�K
������·��ÿ��ݔ�뷽�����l������ͬ�ģ�����λ���в�e������(j��)늙C(j��)��ͬ���\(y��n)����Ҫ(�\(y��n)�D(zhu��n)��)��A��B��c����ģ�Kݔ��ķ�������λ��Ҫôͬ�ࡢҪô���ࡢҪô����(90����270��)��˾�r��ϣ������ģ�K��ݔ��������������������λ�ϱ����@һ�P(gu��n)ϵ�����ڷ�ֵ�Ͽ��Ը���(j��)���ԵĿ���늉�M���̡���R�����������{(di��o)����
������ģ�KA����������һ������ģ�K�и��c(di��n)�Ĺ������ͣ���D3��ʾ�����c(di��n)��ռ�ձȞ�50���ķ���ݔ�롣ݔ���ֳɃ�·����·����λ���180����r1��r2�ṩһ��ֱ��ƫ��늉�
������̖��(j��ng)�^���G�ֺõ�B��c���c(di��n)��늉����Ρ��@�ɂ����ν�(j��ng)�^�ɂ����^���c����늉����������^���õ����з���D��E�����������(q��)�Ӄɂ���Ч��(y��ng)�ܵĖŘO����Ч��(y��ng)�ܹ������_�P(gu��n)��B(t��i)�����õ���ݔ�����Ξ顰������Ҋ��������һ��������̖��������r�cԓģ�Kݔ�뷽����������ͬ���@��������̖�ٽ�(j��ng)�^ƥ��늸�(�D��δ����)�Ϳ��Եõ����ڞ鶡��������̖������������늙C(j��)���ӵĉ���մ�Ƭ����ԓ������̖�ķ�ֵ����λ���c����(sh��)Z���P(gu��n)������������(sh��)��׃�ėl���£�����(sh��)���ɿ���늉�������****�Q����
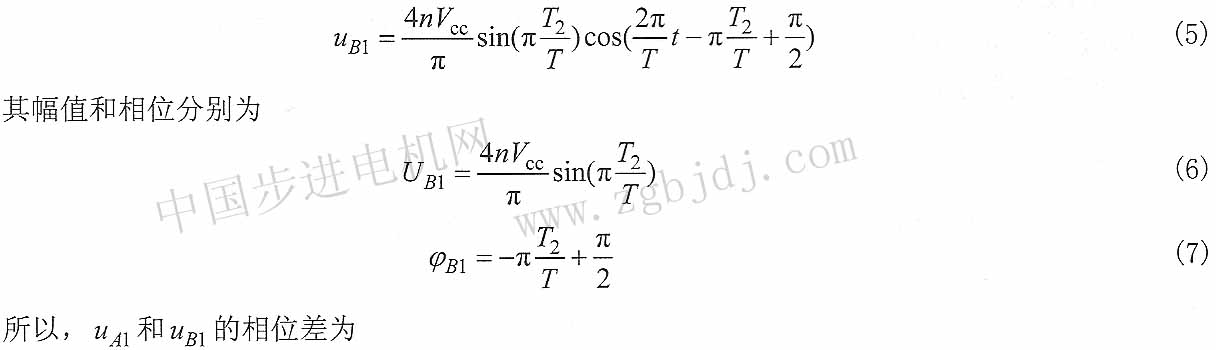
�ڈD3�У��O(sh��)���c(di��n)�ĵ�һ�������صĕr�g���c(di��n)f=O�������M(j��n)��̩��չ�_���ɵõ���һ�A������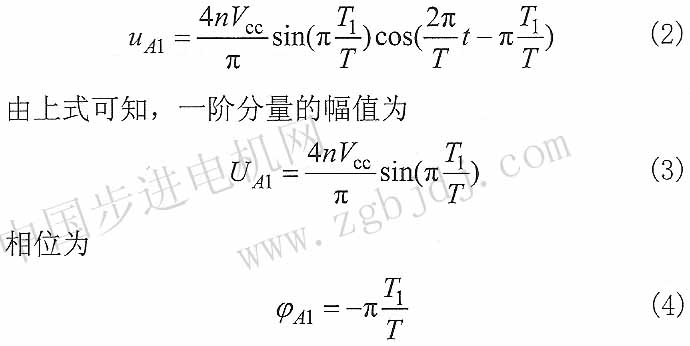 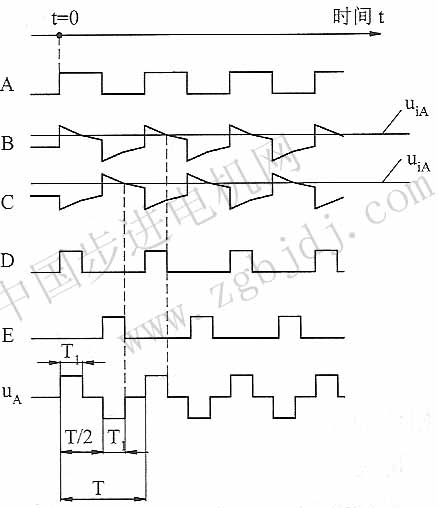
��Ҋ������(sh��)�����{(di��o)����ݔ��������̖�ķ�ֵ��ҲӰ푵���̖����λ�� ������һģ�K����ģ�KB���O(sh��)����ݔ�뷽����ģ�K
A��ݔ�뷽����ǰn��2�����䌦��(y��ng)���{(di��o)��(ji��)����(sh��)���ˡ�ͬ�������Եõ�����һ�A��������Bģ�K��ݔ��������̖

������������Եõ����½Y(ji��)Փ�����ڈD2��ʾ���(q��)���·��ͨ�^�{(di��o)��(ji��)�����ݔ�����늉������Ԍ�(sh��)�F(xi��n)����ݔ�������(q��)����̖�ķ�ֵ���ơ���Llq��lW,��Ӱ�����������λ����ʹ�����(q��)����̖֮�g����λ��ܱ��ֳ�ֵ(��������ͬ�����)���@�c�����ɶȳ���늄әC(j��)�{(di��o)�����Ƶ�Ҫ���Dz����ϵģ�ʹ�{(di��o)��Ҏ(gu��)��׃�Ï�(f��)�s���@���������(q��)���·��С��֮̎��
3�(q��)���·�ĸ��M(j��n)
����������ֵ���ƺ���λ���Ƶ���ϬF(xi��n)�����(q��)���·�M(j��n)�и��M(j��n)�����M(j��n)����·��һ��ģ�K(������)��D4��ʾ���c�D2��ͬ���ǰ����·�ijɷe���·��
�䲨��׃�Q��������D5��ʾ���{(di��o)��(ji��)�e���·��ʹ����ģ�K�е������e���·������һ�¡�ͬ�r�{(di��o)����e�ֳ���(sh��)��ʹ���ڽo����ݔ�뷽�����l�������c(di��n)�IJ��Ξ�һ�����Q�����Dz������Dz����D(zhu��n)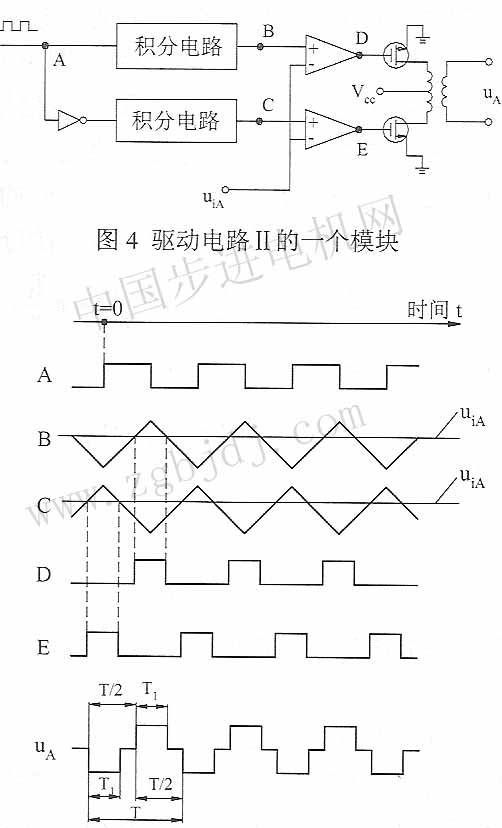
�D5�Y���·II��һ��ģ�K���c(di��n)�Ĺ�������
���c(di��n)�����c���c(di��n)�����������غ��½��،���(y��ng)���@�ӣ�ͨ�^�{(di��o)������늉��������ɵõ�n���IJ��Σ���D5��ʾ��
ͬ������A�c(di��n)�ĵ�һ�������صĕr�g���c(di��n)f=O�������M(j��n)��̩��չ�_���õ���һ�A����������λ�����λ��һ������(sh��)���cZ�o�P(gu��n)��
��Ҋ������(sh��)��ֻ�{(di��o)��(ji��)��ݔ��������̖�ķ�ֵ������Ӱ푵�������E o bj�ˣ���������ģ�K���քe�{(di��o)��(ji��)�����늉����������ޡ�����c�����Ԍ���
·����ݔ����̖�ķ�ֵ�քe�M(j��n)�Ъ�(d��)���{(di��o)��(ji��)�������a(ch��n)�����Ӱ푣�����֮�g�ԾS���������λ�P(gu��n)ϵ(��������ͬ�����)��Ҳ�����f�����M(j��n)����(q��)���·�����˷�ֵ����λ����ϡ�
�����īI(xi��n)
[1] �������D(zhu��n)�͉���в����R�_(d��)���о��Ͼ����Ͼ����պ����W(xu��) 1997
l 2l �n�T�����͉�늳��R늙C(j��)���о��Ͼ��Ͼ����պ����W(xu��)��ʿ���о��������1999
l 3l κ��ˮ���R�R�_(d��)���(q��)�Ӽ�����Ƽ��g(sh��)�Ͼ����Ͼ����պ����W(xu��)��ʿ�W(xu��)λ2000
[4] ���F���в��ͳ�늙C(j��)�ŷ�����ϵ�y(t��ng)���о��Ͼ��Ͼ����պ����W(xu��)��ʿ���о��������2000
|











