�����ŷ��Ӽ��g����lչڅ��
����1����Ɩ|1����־�i2
(1���㽭��W���㽭����310027��2.����Ӣ�~���������˾���㽭����310027)
0����
������S�����Ų��ϡ����ʰ댧�w��̎�����Լ�Ӌ��C���g���M�������Ž����ŷ�늙C�ͽ����ŷ������õ����w�ٵİlչ��������Č�����о����F���ѽ��V���đ��õ��������ĸ����I�������ŷ���ϵ�y��������ϵ�y����һϵ�Ъ��صă��c���繦���ܶȸߡ��ӑB푑��졢�������ش��{�ٷ����������ȸߡ��ɿ��Ժá�Ч�ʸߵȣ��ڸ߾��Ȕ��ؼӹ��O�䡢�����Cе���I��õ��ˏV�����ã�����ȡ���˂��y��ֱ���ŷ��Ͳ��M�ӵȂ��y���O�䡣�ڬF�������b���У������ŷ���ϵ�y���b���е���K���в������b��ĸ߾��șCе�\�ӺͲ���Ҳ���ɽ����ŷ�늙C������ϵ�y����ɣ������ܵĺÉ�ֱ�ӛQ���������b������ܣ��ǬF�������b���еĺ��IJ���֮һ��
�����ŷ�ϵ�y��һ�����͵ęC�һ�w���aƷ�����ŷ�늙C���w���ŷ������ɲ��ֽM�ɡ��ŷ�늙CĿǰһ�㶼����ϡ�����Ų��τ�ţ��������Ų��ϴ����ܵIJ�����ߣ��ŷ�늙C�����߹����ܶȡ���Ч�ʺ߾��ȷ���lչ���ŷ����������������ɶȡ����ܻ��;W�j���ķ���lչ��
�������ŷ�ϵ�y������о��������^�������w���_�l���о�ˮƽ߀�����^�ͣ������ŷ��ӮaƷ���еͶ˞������ߙn�ŷ��ӮaƷ�������ǿհף����w�ļ��gˮƽ���ߣ���ϵ�y�����m���ԡ��ɿ��Եȷ���͇���aƷ�����@�IJ�ࡣ�҇����ŷ��ӷ���ć��ز��������ѽ����ص��������҇����ؙC���ļ��g�M���ͮaƷ���ܵ�������Ҳ�ɞ����҇��lչ��ߙn���ؙC������Ҫ���gƿ�i֮һ��2009����҆��ӵġ��ߙn����ϵ�y����헣�Ҳ���ŷ���ϵ�y�����P�I���g�M�й��P�о���
1���Ž����ŷ�늙C���g
ˮ�Ž����ŷ�늙C�����Q�ŷ�늙C����һ�N����ͬ��늙C��һ���əC�������ӡ��D�Ӻ�λ�÷����b��(���늾��a��)�ȽM�ɣ���D1��ʾ�������ɛ_Ƭ���@�M�M�ɣ��ͮ���늙C���ƣ��������ŷ�늙C�ĘO���Ͷ��D���X������c��ͨ���ஐ�����^���e��һ��O���^
�ߡ��ŷ�늙C�D���������D�ӣ�һ�����ϡ�����Ų��ϣ����S�F���⒵ȡ�
�ŷ�늙C�����܌�ֱ��Ӱ��ŷ�ϵ�y�����������O������ܡ����˜pС�ŷ�늙C�w�e�����������ϵ�y���Dl�ŷ�늙C�M�����ͼ������ܣ��߹����ܶȵĽ����ŷ�늙C���OӋ�����켼�g���ŷ�ϵ�y����Ҫ�о��Ͱlչ�����ŷ�늙C����һ�N����늙C�����^����İlչ
���M�����OӋ�����켼�g�ѽ��������졣�����Mһ������ŷ�늙C�ĸ��N���ܣ�ͬ�r�pС늙C�ijɱ�����Ҫ��늴ź͙Cе�OӋ�����Ӻ��D�ӵ��OӋ���켼�g��늙C�p�ĺ�ɢ�Ἴ�g�ȶ�����֣���ȡ��N���g�ֶΣ����Mһ������ŷ�늙C�Ĺ����ܶȺ����w���ܡ�
1.1늙C�OӋ���g
�������ŷ�늙C���OӋ�����켼�g�����ŷ��Ӽ��g���P�I֮һ��Ŀǰ���Ȱ㶼���Â��y�Ĵ�·��������]Ӌ�ŷ�늙C�����ڸ����ܵĽ����ŷ�늙C��������Ҫ��ߣ����ň��ֲ����l�ᡢ��������r���^����s�����tHj���y�Ĵ�·�ķ������OӋ��һ���`��ܴ��y�lӋ���M������ָ��Ҫ���늙C��Ҳ���܌�늙C���X�����ء����ز��ӡ�늸�׃������·͵����ܼ��¾��_�ķ�����
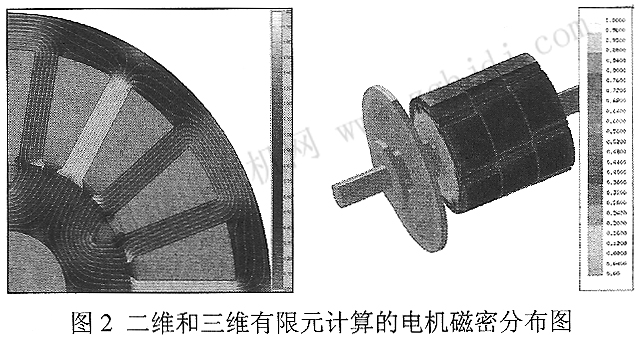
Ŀǰ���^���M���OӋ�������Զ��S����Ԫ�������Y�����S����Ԫ����늙C�����w���ֲ��M�Ѓ����OӋ����늙C������늴�ؓ�ɡ��p�ġ���������©��ͨ���p�ĵ��M��Ԕ�����������C늙C������܅����������_������ֵ���������w����������Ԫ������ʹ���OӋ���ȵõ����C���D2�ǽ�����Ԫ�����OӋ���늙C��ͨ�ܶȷֲ��D�����ͨ�ܶ����ɫ��ʾ���Gɫ��ʾ�]�дň��ֲ������Sɫ��ʾԓ̎�Ĵ�ͨ�ܶȳ��^��1 8T���F���_ʼ͡�
�����ŷ�늙C�c�ŷ���������ƥ��Éģ���ֱ��Ӱ푵�ϵ�y�ľ��Ⱥ����ܡ���ˣ���ϵ�y�ĽǶ��о�늙C�������ă������g������****�ȵă���ϵ�y�ɱ���ͬ�r���ϵ�y���ܣ�����늙C���ſ��Ʒ��棬ֻ��늙C���w�кܺõ���������,���ҿ������������ſ��ƵĹ��ܣ����܌��Fϵ�y��****���ſ��ơ�
�ڴ����ŷ�늙C�����ŷ�늙C�У��S���D���⏽���D�ٵ���ߣ�������ܵ����x����Ѹ����ߣ�����ڼ��늙C늴����ܵ���r�£��OӋ���Թ̵��D�ӣ���ֹ����w�����t��늙C�OӋ����һ���y�}������r�@һ�늙C���OӋ����Ҫ�M�ЙCе����Ԫ�������Ԍ�늙C�Ȳ��đ����͙Cе�����M��У�ˡ���ǰ�Ј��������OӋ�̓���늙C�Y�������ܵ��̘I����Ԫܛ��������죬�@Щܛ����Ԍ�늙C��늴����ܡ��Cе�����M�ж���������Ӌ��ͷ��棬�@ʹ���OӋ���߹����ܶȵ��ŷ�늙C�ɞ���ܡ�
1��2���Ӽ��g
�ŷ�늙C�Ķ��˽Y�������c��ͨ����늙C��ͬ�����ڶ����@�M���OӋE�t�кܴ�IJ�ͬ���ڴ����ŷ�늙C�У������@�M�Y�����OӋ���������X����ϣ���횿��]��늙C�ij�����늙C���X�����غ����ز��ӵȡ�
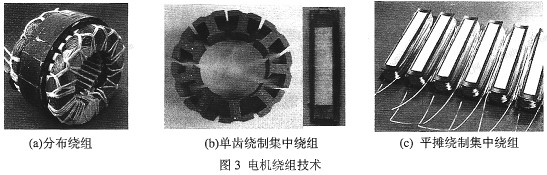
�ڂ��y���ŷ�늙C�OӋ�У�һ����õ�������ֲ��@�M����18��6�O��24��4�O�ȣ��@�N�@�M���ձ��������@�M���@�Mϵ���^�ߣ���Ч�F���L���^�̡�ͬ�r������ÿ�۵IJ۔��^�࣬һ��늙C������������^С�����ǣ��@�N�@�M�Ķ˲��^�L����l��3a��ʾ�������dz��õ�4�O��6�O늙C�Ķ˲��^�L������ʹ�ö��F��늙C��Ч��һ�㲻�ߡ�
�ڽ����_�l���ŷ�늙C�У�Խ��Խ����Dz��÷֔��ۡ������@�M���@�N�@�M����õ��V���đ��õ�12��8�O��9��6�O���X����ϵ�늙C�������@�M���@�Mϵ���Եͣ���Ч�F���L�ȿ��ܕ����L�������@�N�@�M�Ķ˲����R��С��늙C���L�ȴ��s�̣������@�M�����pС��늙CЧ�ʿ��ܕ��Ը�һ�c��������Ҫע����ǣ��mȻ���÷֔��ۺ�늙C���X�������½��ˣ����nj���ijЩ�X����ϣ�����������ӿ��ܕ�����
���ü��з֔����@�M��늙C���ӿ��Բ������͵Ć��Xƴ�bʽ�ĽY�������X�Ϊ��@�ƾ�Ȧ��Ȼ���b���һ�w(�D3b)�����ڲ����˼����@�M���@�M����ͨ�^��X���̵ľ����@���C��λ�ž��@�ƣ��@�M�˲����Ӷ�С���R���Ķ�ʹ��늙C���L���Mһ���s�̡������@�M�dž��Xֱ���@�ƣ����ǂ��y�ďIJۿ��¾���ʽ��������S늙C�ۿڳߴ��С��ʹ��늙C���X�����ش��pС������Ҫ���ǣ���ȡ�@�N�Y���Ժ��@�M���H�M�ʌ���߰ٷ�֮30���ң����]���@�M�˲��p�ĵȣ�������늙C�~���p�Č��½��ٷ�֮40���ң��Ķ�ʹ��늙C�w�eС��Ч�ʸߡ��͆��Xƴ�b������Ƶ�߀��ƽ���@�Ƶķ���(�D3c)����ƽ����늙C�_Ƭ���@�ƾ�Ȧ��Ȼ����ɈA�Ρ���Ȇ��Xƴ�b������ƽ���@�Ƶķ������aЧ�ʸ��ߣ����_����****�M���Ե͵��ܽӽ���
1 3�D�Ӽ��g
�ŷ�늙C���OӋ�P�I��׃�������F���D�ӽY��������ϣ���ͬ�D�ӽY�����ŷ�늙C���F����ͬ��늴����ܣ��Լ���ͬ�đ��È��ϡ�
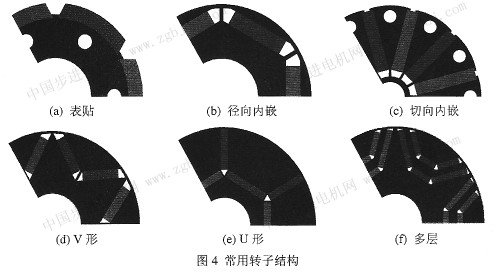
���y���ŷ�늙C�D�Ӳ��ñ�ؐռʽ���(��D4a��ʾ)�����ʹ���zˮճ�Ӻ�߀��Ҫ�M�н���
�ͼӹ̣��ӹ���ˇ���s��ͬ�r������þ��и�ӹ����ɣ�������ճ�N���D������棬���и�ķ�ɢ�ԣ��D��������ƽ���ԣ��zˮ��ȵȶ���Ӱ푵���϶�ň����ε�һ���ԡ�
��������N��Ƕʽ�D�ӽY���õ�Ѹ�ٵİlչ�͑��á��D4b-4f�o��5�N���õă�Ƕʽ�D�ӽY�������Џ����Ƕ��u�κ�v����鳣�á���Ƕʽ���D�ӽY�������K�εĴ�䓉Kֱ�Ӳ��뵽�D�ӛ_Ƭ�Ȳ������Ã�Ƕʽ�����D�Ӻ�ʹ��늙Cd�S��q�S��·���F�����Q���Ķ��a�����ӵĴ������أ�ʹ��늙CЧ�ʺͳ������õ����Mһ������������늙C�Ĵ�·��������䓵õ��˸��õĴű��o��ʹ�ô�䓵Ŀ��˴����ܴ����ߣ��@Ҳ��ʹ�ô��ܷe���ߵ�ϡ����䓳ɞ���ܣ��Ķ���Ч�����늙CЧ�ʣ��pС늙C�w�e�����늙C�Ĺ����ܶȡ����^�����ęCе�����OӋ����Ƕʽ�D�ӽY���Թ̿ɿ����o���~��Ľ����ͼӹ̴�ʩ�����m��늙C�ĸ����\�У����ӹ���ˇ�������Ρ�
���⣬��Ƕʽ�D��늙C����d�S늸�׃��늙C����������Ҳ�h���ڲ�����ͨ���δ�䓻��߭h�δ�䓵�늙C���dz��m�ϸ��������\�С���������Ã�Ƕʽ�Y����늙CЧ�ʸߡ��w�eС�������ܶȸߡ��Y���Թ̲����m�ϸ����\�У�Ŀǰ��Ƕ�D�ӽY���ѽ��ڸ��N����늙C�Լ�����Ҫ�����ŵĈ��ϵõ��ˏV���đ��á�
���ǣ����y�OӋ�ă�Ƕʽ�D���ŷ�늙CҲ����һЩ���}������늙C�Ȳ��ֲ�͇��أ��OӋ�y�ȴ��X�����غ�ؓ�d���ز��Ӵ�늙C��****�����ܵ��˴ň�͵����ƣ�ʹ�÷�ֵ���ؿ��ܲ�����Nʽ�ŷ�늙C�����ڲ��Ã�Ƕʽ�D�ӽY����늙C늸�׃��늙C�������������½������ǣ�ͨ�^�����ͳ�ֵ�ϵ�y�OӋ�̓������@Щ���}�����Եõ��ܺõĽ�Q����Ȼ����늙C�OӋ�ͷ������gҲ����˺ܸߵ�Ҫ�D4b��4f����ʾ���D�ӽY�����������c���m�õĈ��ϡ�
1��4늙C�p�ķ�����ɢ�Ἴ�g
���������Ŀ��g�ȣ��_����߹����ܶȺ������ܶȣ���횷���늙C�ēp�ĺͰl�ᣬ������Ч��늙C����s��ɢ�Ἴ�g�����ŷ�늙C�У��ֵİl�ᶼ�ڶ��ӂȣ����@�M�~�ĺͶ����F�ġ�һ����ԣ������\�Еr��늙C��Ҫ�p�����~�ģ�������늙C��ֵ���ؕr�������ֵ�������~�����ص�3�������մ��~�����~���r��9���������횿��]�@�M�����S�������܉���ܵ����L�r�g�����ŷ�늙C�����\�Еr����ʹ�ǿ��d�\�У��F��Ҳ�����ஔ��ͬ�r���о��������ŷ�늙C�ڿ��d��ؓ�d�l���µ��F��׃������ͨ�^�о��ͷ���늙C�ĸ��N�p�ĺ�ɢ��;�����������늙C�ij������߽����@�M�Ĝ�����
����ͨ���ŷ�늙C�У������D�������w�ň������㶨������늘з����ň����D��ͬ��������D�ӂȵēp�ĺͰl�ᆖ�}�h�]�ж��Ӈ��ء����ǣ��ڸ����ŷ�늙C�������ŷ�늙C�У��OӋ�ļ��g�y�Ȼ����϶��c�D�ӵ��OӋ���g���ֶ����P���D�ӵēp�ĺͰl��Ҳ�ɞ�������늙C����������Ҫ���������D�Ӹ����\�Еr�����H�D���F�����ڴ�ͨ��׃�����a��һ�����F�ģ����Ҳ�����ڴ�ͨ��׃���a��һ���ēp�ģ��@Щ��ͨ��׃�����Ȳ����l���^�ߣ��D�ӓp�Č��S��늙C�D�ٵ���ߣ�����늙C���ʵ���߶�Ѹ��׃���D�ӓp�ĵĿ��������h���ڶ��ӓp�ģ��������ڸ������D���D�ӛ]�����õ�ɢ��;����ͨ�����D���^��ʹ��ʧ�ű��o����˸��ٺʹ����ŷ�늙C�ļ��g�y�c��
ᘌ�����늙C�ʹ�������늙C���OӋ���㽭��W���T�_�l�˻���늴�����Ԫ���F�ĺʹ�䓓p�ĵķ������g���Լ����ڙCе����Ԫ���D�әCе���ȷ������g�����Pܛ���������ѽ��l�팣�}�W�gՓ�Ĕ�ƪ��
2�ŷ��������g
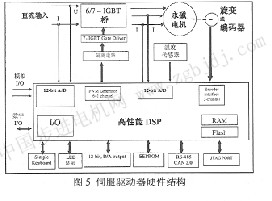
�����ŷ�늙C����ֱ���B����늾W��ʹ�ã�������ŷ���������늙C�\�С��ŷ������ǽ����ŷ�ϵ�y���P�I���������漰���g���s�������࣬���ŷ�ϵ�y���P�I���g���ŷ���������Ҫ�������ֽM�ɣ��քe�ǹ������·�������·�ͻ���DSP�Ŀ��Ʋ��ԡ��������·����������Y���������·�����D�ӵČ��rλ�ú�늙C�Č��r����������l��PWM��̖�����ƴ������·�Č�ͨ���P�࣬���F��늙C늉�������Č��r���ơ��D5�������Ļ���Ӳ�����ɡ�
2.1����Ӳ��
�ŷ�������Ӳ�����ְ���������׃�·�������·��λ�Ùz�y�·���_�P�Դ�Ȳ��֣��������P�I�Ĺ�����׃�·�Ϳ����·���S��������Ӽ��g�İlչ��������IPM����ģ�K�ij��F�����������ŷ������Ŀɿ��ԣ�Ŀǰ��С���ʵ��ŷ��������ձ������IPMģ�K�팍�F��׃�������Y�����Σ��ɿ��Ըߡ�Ŀǰ������ģ�K����S�̶��Ƴ���ᘌ��ŷ��ӵ�IPMģ�K����IGBTģ�K�������⡢��ʿ�����T����Ӣ�w��ȹ�˾��������������С����IPMģ�K����һ�����ݣ���Ӣ�w��t�ڴ���IGBTģ�K������Ѓ��ݡ�
�����·�����b�õĿ��ƺ��ģ� ����DSP+CPLD(��FPGA)��������·�M�ɡ������ŷ�ϵ�y��DSP������̎��������ģ���D5��ʾ��I)SF����I�P���衢�@ʾ��ͨ�š�������ٶȣ�λ�ÿ��ơ�PWM��ݔ���Լ�늙C���ƺ����㷨�ȵ�̎����CPLD(��PGA)�t���DSP�����F�ɾ���I��O��I/0���c���Uչ�Լ����l�}�_��̖��̎���ȹ�����
Ŀǰ�m���ŷ�����ʹ�õ�DSP����̎�����N��^�࣬��Ҫ������TI��˾TMS3202000ϵ�е�DSF������Freescale��˾��MC56��MPC55��DSP���ձ����_��Ƭ�C������Ӣ�w���c16x��Tricoreϵ��DSP������AD��˾��ADsP21XXϵ��DSP�ȡ������ձ����������TI��˾TMS320 2000ϵ�е�DSP����һЩ�Ͷ˵��ŷ������������ڵ��ŷ������У�һ����õ�����TI 240��2407DSP�������16λ����DSP�����l��20MHz��6MHz���ȣ��Ȳ�����10λADc�·��PWM�a���·���@�DSP�ѽ����Ի����M���ŷ�������Ҫ�����@�DSP��c��c++�Z�Ե�֧��һ�㲻�Ǻܺã���������������ܣ���ô߀����Ҫ���ÅR���Z�Ծ��̣�ʹ��ܛ���Ŀ��x�ԺͿɾS�o}����͡��������_�l���ŷ��������иߙn�ŷ�������һ�������TI 2812DSP�����32λ����DSP,���l��100MHz��150MHz���ȣ��Ȳ�����12λADC�·�Ͷ�·PWM�a���·���@�DSP�ѽ����ԺܺõĝM���ŷ�������Ҫ���ҿ��Բ���c��c++�Z�Ծ��̡�Ŀǰ��DSP�����a�S���ѽ��_ʼ�ṩ32λ���cDSF����TI 2833xϵ��DSP���@ʹ��DSP��Ӌ���������˴���ȵ���ߣ�������ܿ��Ʋ��ԵČ��F�ṩ�˺ܺõ�Ӳ�����A��
�����ܡ��߿ɿ��Ժ��ɶ��Ǹ������ŷ����������OӋ���c��Ŀǰ�ձ���õ��OӋ���������Ⱥ���Ӳ���·�OӋ���������DSPܛӲ�Y�ϵ��·���c��DSP+cPLD�Ĕ����·��ܣ���ȡ���ر��o��ʩ������Ԫ�����������^��I���ӵėl���£���߆�Ԫ�����Ŀɿ��ԡ�
�ڴ����·�Е����F�S����С�����·�������F�Ć��}���ڸ�늉���������Ĵ��������У����N�ֲ�����������sɢ�p�ġ��sɢ��ݺ��sɢ늸еȣ������������a�����������ء�
����������Y���OӋ���·�OӋ�ϱ��C���ʵ�������Ч�ɿ���ݔ�����������OӋ�P�I���@Ҳ��Ŀǰ�����ŷ��������y�����ڡ�ͬ�r�����OӋһt������ϵ�y�Ŀɿ��ԡ����L������늙C��ʹ�É����Ǯa�I�����_�ɹ����P�I��
�����ŷ�����I���漰�߉�������_�P�ܵĸ����_ͨ���P�࣬����@����������ǙC���O���е�늴���ȾԴ��ͬ�r�����ŷ��������O�����c���N�·�塢���ƿ����������İ��b���x�����֮���ĸɔ_���������С�������ŷ����������ŷ�늙C��EMC���Ƽ��g���V�����gҲ���ŷ��Ӽ��g���о��P�I��
2.2���Ʋ���
�ŷ������Ŀ��Ʋ������ŷ��Ӽ��g�����о�����һ�����棬�����㷨�ĺÉģ�ֱ���Pϵ������ϵ�y�����܃��ӡ�������W�ߌ��ŷ�늙C�Ŀ����㷨�M���˴������о���һЩ�ѽ��ɹ��������������У�ȡ���˺ܺõĿ���Ч����
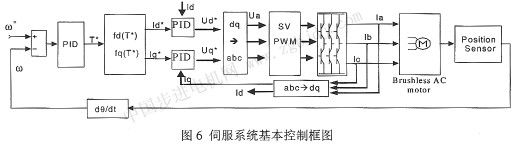
ʸ�������㷨��Ŀǰ���ŷ��������Б�������������һ�N���������㷨��ԓ�㷨���D�����D�ň��酢������ϵ������������ֽ��ֱ�S�ͽ��S�ɂ�������ֱ�S�����܉��{��늙C��ţ������S����������늙C늴��D�أ��@�Ӿ͌��F��늙C늴��D�صĽ�����ƣ��Ķ�����ȡ�������ֱ��늙Cһ�ӵĿ���Ч�����D6���ŷ�ϵ�y�������ƿ�D��
����ʸ�����ƣ�߀��һ�N���õĿ��Ʒ�����ֱ���D�ؿ��ơ�ֱ���D�C�����㷨����Ҫ�M��ʸ�������㷨�ď��s�����D����׃�Q���Y��PWM�㷨��ֱ��ͨ�^������늙C�Ķ��Ӵ�ͨ���D���M���]�h���ƣ������㷨r�ֺ������ڮ���늙C�Ŀ����еõ��ˑ��á��ŷ�늙C��ֱ���D�ؿ����mȻĿǰ�о��^�࣬���ڮaƷ�ϵđ��õ�߀�����]�У���Ҫ������mȻֱ���D�ص����ӑB�{�����܃����������B���ܺ͵��������^���Ȼ��Ҫ�M�����о���
�����ŷ�ϵ�y������ָ�˿��ԏ��{�ٷ�ͬ����λ���ȡ����پ��ȡ��ӑB푑����\�з����Եȷ�����������ӑB푑���ͨ��������ָ����ϵ�y****푑��l�ʣ����o��****�l�ʵ������ٶ�ָ�ϵ�yݔ���ٶȲ��ε���λ�����^90�����߷�ֵ��С�ڰٷ�֮50���ӑB푑����齻���ŷ�ϵ�y����Ҫ����ָ��֮һ�������s�̔���ϵ�y�IJ��a���ں�����ŷ�ϵ�y�ĵĄӑB��������Ҫ���x��Ŀǰ���ȵ��ձ��200 Hz���͇����500��600 Hz������һ���IJ�ࡣ
��ǰ�ŷ�ϵ�y�ձ鶼���û���ʸ�����Ƶ�����h���ٶȭh��λ�íh�Ŀ��ƽY���������{�������Â��y��PI�����㷨������ؓ�dͻ׃�����{�ٷ����^�����r�£����y��PI���ƺ��y�õ��M��Ŀ���Ч������ˣ�һЩ�W������˲��ìF�������㷨���{��������ģ�������������m�����������W�j�������ȣ�ģ������������Ƭjģ�����ρ������˂��ճ���ʹ�õĸ����е�ģ���ԣ�ģ���쾚�����ˆT�ҵĿ��ƽ���������ԓ�㷨�������{�����������ԣ��W�j���ƿ�������늙C�������ھ����R����ۙ�����Ԍ������������M�����m���{�������m�����ƿ�����ϵ�y�\���^���в�����ȡģ�͵����P��Ϣ�������㷨���S�@Щ��Ϣ�����{�����܉�˷�����׃������������Ӱ푡�
2.3�F�������ӿڼ��g
�F���������g���ŷ����b�Ì��F���١��߾����Ƶı�Ҫ�l�������y�Ĕ���ϵ�y(CNC)ݔ���o�ŷ��b�õ�ָ����ʽ��ģ�M늉��ٶ�ָ����}�_λ��ָ��@�ɷN��̖��ݔ��ʽ������̖���ɔ_����������͡���̖��Ϣ�����ޡ�Ӳ�����s���ɔUչ�Բ���T�����}���ɞ��Ƽs����ϵ�y���ŷ�������������ƿ�i���F���������g�ܺõؽ�Q�˂��y����ϵ�yģ�M늉����}�_��̖��ݔ��ʽ���ڵĿ��ɔ_�������̖��Ϣ�����ޡ��ɔUչ�Բ�Ȇ��}�������������˔���ϵ�y���ŷ��ӵļ��gˮƽ������ָ�ˡ�
�ŷ�����������ϵ�y���е�һ��Ԫ������ͨ�Ź����Լ��F��������֧�������ܵ����g�ˆT����ҕ��Ŀǰ����˾���ŷ����������û���ͨ�^���ÿ�֧�ֶ�N����ͨ�Ņf�h��Ŀǰ���õ���Profibus-DP��CAN��EtherCAT��SERCOS�ȡ�
PROHBus�f�h�Y���Ǹ���ISO7498���H�ʣ����_��ʽϵ�y���W�j(Open System
Interconnection-SIo)���酢��ģ�ͣ���һ�N���H�����_��ʽ������ه���O�����a�̵ĬF�������˜ʣ��V���m��������I�Ԅӻ������̹��I�Ԅӻ��͘����ͨ������������I���Ԅӻ���
PROFIBus�ąf�h���F��ͨ�^PROFIBUS�Č��Åf�hоƬ�c̎�����ĽY�ρ���ɡ�
PROHBus-DP��һ�N���ٵͳɱ�ͨ�ţ������O�伉����ϵ�y�c��ɢʽI/O��ͨ�ţ�����RS-485�p�g�����p����|����|��****ͨ�������_��12Mbps��
CAN(controller Area Netwrork)�����ǵ�BOSCH��˾��80��������Q�F����܇�б���Ŀ����c�yԇ�x��֮�g�Ĕ������Q���_�l��һ�N���Д���ͨ�Ņf�h��������****���ܬF�яV�������ڹ��I�Ԅӻ�����N�����O�䡢��ͨ���ߡ��t���x���Լ��������h�����Ƶȱ��ಿ�T��CAN��һ�N����������ͨ�Ž��|�������p�g����ͬ�S��|����|��ͨ�����ʞ�1MBPS��CAN�f�h����CRC�z���ṩ�������e�`̎�����ܣ����C�˔���ͨ�ŵĿɿ��ԡ�CAN****�����ԡ��O�ߵĿɿ��Ժͪ��ص��OӋ���e�m�Ϲ��I�^�̱O���O������B����ˣ�Խ��Խ�ܵ����I�����ҕ�����ѹ��J������ǰ;�ĬF������֮һ��
EtherCAT���ɵ�BECKHOFF����ķN���r���I��̫�W�����ژ˜ʵ���̫�W���g������ϵ�y���ú��Ρ����١�ȫ�p�����ߔ�����Ч�ʵ����c������ͨ�������_��2��100Mbps��
EtherCAT���gͻ����������̫�W��Q������ϵ�y���ƣ����ܳɞ鹤�I���ƾW�j�ͬF���������������g��EtherCAT���Ԟ�F�еĬF�������ṩ���εĽ�u��ԓ����ʹ���Ñ����O�������̿����p����ɏĬF�еĬF��������ElherCAT���g���D�Q�^�̣����Ԍ��FCANOpen��SERCOS�ȅf�h��
2 4λ�÷����ӿڼ��g
���ڸ������ŷ�����ϵ�y��λ�÷�����̖���|���;���ֱ��Ӱ�ϵ�y�ľ��Ⱥ�푑����nj��F�ŷ�ϵ�y���١��߾��ȿ��Ƶı�Ҫ�l����
Ŀǰ���ŷ�ϵ�y��ʹ�õ���ͨλ�Â�������һ�����RS422�ӿڣ���2500������ʽ��W���a����ֻ������һЩ����Ҫ�ߣ�ͬ�r�����h�����^�õĈ��ϡ����ڹ����h�����ӣ������D�ٱ��^�ߵĈ��ϣ��t��Ҫ�������D׃���������ɱ��^�ߡ�ʹ�����D׃������λ�÷����ľ���һ����ȡ�Q�����D׃����������һ����7��22�ȷ����ң���һ������ȡ�QȥRDCоƬ�ľ��ȣ����õ���12λ(�ȃr��1024�����a���ֱ���)���ߙn��Ҳ��16λ�ģ���һ��r��ܸߡ�
���ھ���Ҫ��ܸߵĸߙn�ŷ�ϵ�y����횲��ø߾����ľ��a������17��22bit�߷ֱ��ʵ�****ʽ���a�������Ȧ�ֱ���>13�f��������ʹ�ŷ�ϵ�y�Ķ�λ���Ⱥ͵��ٵķ��پ��ȴ����ߡ��@ηֱ��ʵľ��a��һ��Ȳ����Ô�����̖��ģ�M��̖��Y�ϵ�̎��������ÿȦ�a��1024��sin��cos��ģ�M��̖����sin��cos�IJ��a̎�����Ԯa���ܸߵķֱ��ʣ���������ģ�M�·��ADC�·���`����H���ȕ�������ݔ����****�ֱ��ʡ�
****ֵ���a���ĽӿڷN��^�࣬����Ҫ�֞�����һ����ִ��нӿڣ���Biss��SSI��߀��һ��Д��ִ��нӿ�����sin��cos��ģ�M��̖����Hiperface��Endat���Ñ���Ҫ����̎��ģ�M��̖�IJ��a̎����������a���ijɱ������^�ͣ����ӿ��·���s�����ø߷ֱ��ʵ�****ʽ���a���ӿڼ��g�Լ���Ч��ͨ�Ņf�h�������@�����������ŷ�ϵ�y�ļ��gˮƽ�;��ȡ�
2��5�����{�ټ��g
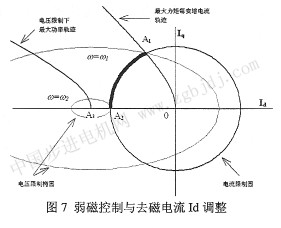
�������ŷ�늙C�M�����ſ��ƣ����ԔU��늙C���{�ٷ������������������늙C�Ĺ���������һ����ԣ��ŷ�늙C��****�D���ܵ�늾W늉������ƣ�늙C�ķ�늄ݲ��ܴ���늾W늉�������D�ӵĴ�䓴�ͨ�Ǻ㶨�ģ�늙C���D�پ��ܵ������ơ�����ڿ����^���У��˞�خa��ȥ�Ŵ�ͨ�����{���f�����ʹ�@�M����ͨ���ͣ��t�����~��늉������늙C�D�٣������ڵ�늉��r���S���^�ߵ��D�٣��@�������ſ��ơ����ſ��Ƶ�ԭ�����v�Ǻܺ��εģ����H��Ҫ���F���^��������Ź����Ǹ����ܽ����ŷ�늙C��������һ���y�c���@����飬�������{���^���У�����Ҫ��Ҫ�������늾W늉���ȥ�����Ҫ���m���^���ȥ�������ʹ��ϵ�yЧ�ʴ�����½������^С�@����ʹ늙C��������½��������_���������D�١��D7�nj��F���ſ��ƕr��****Id��Iq����S�ٶ�׃�����{��������
�ڸ������S�����У���ȡ���ſ��Ʋ��Ժ�������늙C�OӋ������늙C****���غ���
���D�ٿ���ͬ�r�õ���ߣ��������ʵȼ��t�ɾS�ֲ�׃���Ķ�ʹ��ϵ�y���w�e��С��
�������p����ͬ�����S늙C�У����ſ��Ƽ��g�������P�I�ļ��g��
3�Y�Z
�ŷ���ϵ�y���䃞Խ�������������ܵ��˂�����A���ڹ��I�I�������á��S��DSP���g��������������ܵ��Mһ����ߣ��Լ��������ܿ��Ƽ��g�IJ���ӿ�F���ŷ���ϵ�y����߀���Mһ��������Ŀǰ�ߙn���ŷ�ϵ�y�Ј�������aƷ��̎��****��λ��������������һЩ�S��Ҳ���^�аl��һϵ����С�����ŷ�ϵ�y�����ɹ������ڸ����I���������ˇ���aƷһ�y���µľ��棬�����ȮaƷ���ŷ�ϵ�y�����m���ԡ�ϵ�y�Ŀɿ��Եȷ���͇���aƷ߀�����@�IJ�ࡣ |