| һ�N����ģ�B(t��i)�D(zhu��n)�Q������늙C(j��)
ժҪ���O(sh��)Ӌ(j��)��һ�N���͵ij���������늙C(j��)��ԓ늙C(j��)������һ��(g��)����4��(g��)���X�ı�W(w��ng)�h(hu��n)���ڽ���늉��ļ���(l��)Fͬ�h(hu��n)���v�����(d��ng)��4��(g��)б�ό���ͬ���(d��ng)�D(zhu��n)�Q���D(zhu��n)�ӵ����D(zhu��n)�\(y��n)��(d��ng)������ģ�B(t��i)�D(zhu��n)�Q�͡��˷N늙C(j��)���˺��С���m�ϲ��Â��y(t��ng)�ľ��и�ӹ����ӹ�Ҫ��͡��ӹ�����(l��i)�Ķ��ӳߴ�H6 5mm��6mm����1mm��늙C(j��)��T���l�ʞ�50 5kHz���ڼ���(l��)늉���300vpp�r(sh��)�����d�D(zhu��n)�ٞ�320rmin�����D(zhu��n)���؞�5 5uNm��
�P(gu��n)�I�~������늙C(j��)�����ͣ�ģ�B(t��i)�D(zhu��n)�Q
0����
�S��MEMs���g(sh��)�l(f��)չ������jt�ȵij�늙C(j��)������������w�e���ܶȣ�ݔ�����ٴ����أ�����p�ٙC(j��)��(g��u)�Լ��Y(ji��)��(g��u)��(ji��n)�ε����c(di��n)��u�ɞ�ԓ�I(l��ng)����о����c(di��n)���ĽY(ji��)��(g��u)��l��l_ˇ�����ϣ��@�N�����D(zhu��n)늙C(j��)�����Dl��ʾ��
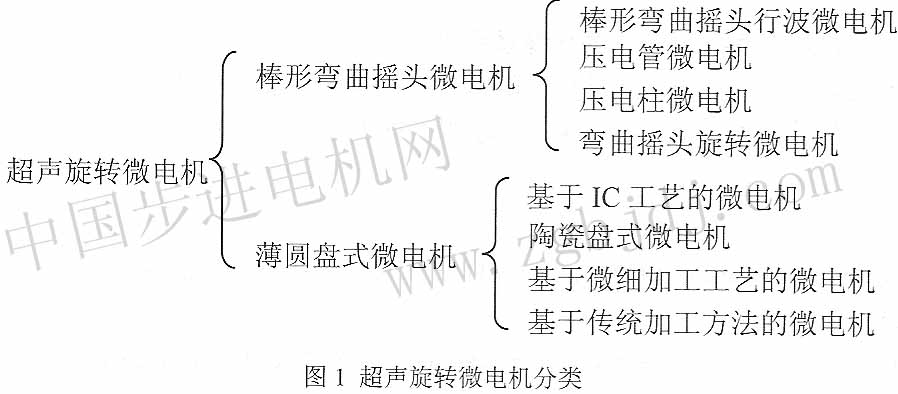
���R���D(zhu��n)늙C(j��)�����Ώ����u�^늙C(j��)<���Ώ����u�^�в�늙C(j��)��늹�늙C(j��)�����늙C(j��)�����u�^���D(zhu��n)� r����Ic��֥��늙C(j��)��ā���Pʽ늙C(j��)1�mݳ�������m��֥��늡�tL���ڂ��y(t��ng)�ӹ�������늙C(j��)
�D1�����D(zhu��n)늙C(j��)���
���Ώ����u�^�в�늙C(j��)�о��^�࣬�Y(ji��)��(g��u)����(du��)���^��(ji��n)ȝ�������Ă���(d��ng)ԭ���Ƕ��D(zhu��n)��֮�g�����c(di��n)���|������|�c(di��n)�ڶ��ӵ���A��߅t�Ƅ�(d��ng)�����D(zhu��n)���g��Ħ����ʹ�D(zhu��n)�������c���|�c(di��n)�Ƅ�(d��ng)������
���ķ����D(zhu��n)��(d��ng)��
��(gu��)���ԓ������о����^�磬�����ѽ�(j��ng)ȡ�����@���ijɹ���1999��TakeshiMorita����ˮ�ᷨ��⁹ܱ�����e��늱�Ĥ���Ƴ�ֱ��2 4mm���L(zh��ng)��10n1In����늙C(j��)������2��J(J0���x�����ֱ��1 4mm���L(zh��ng)��5mm����ͬ�Y(ji��)��(g��u)�ij���늄�(d��ng)�C(j��)��2()(]2���e�ݴ�W(xu��)Burhanettin Koc���Ƴ�ֱ��2 4mm���L(zh��ng)lOmm����늙C(j��)��������(gu��)��(n��i)2()(J1�����A��W(xu��)���FӢ�������Ƴ�ֱ��1mm���L(zh��ng)5mm�����������늄�(d��ng)�C(j��)0 J����?y��n)鶨�ӽY(ji��)��(g��u)��(ji��n)�Σ�ԓ늄�(d��ng)�C(j��)�ɞ鮔(d��ng)�r(sh��)�(x��)�ij���늄�(d��ng)�C(j��)�����ѳ�����(y��ng)�����t(y��)�W(xu��)��(n��i)�Q�R�I(l��ng)����о�����������Ҳ��2��4�����Ƴ�����ֱ��lmm��늙C(j��)���乤���l��24kHz���ڼ���(l��)늉���һ��ֵ��110v�r(sh��)����****���D(zhu��n)���؞�llum�����d�D(zhu��n)�ٞ�2200r��min.
���֮�±�������늙C(j��)���С������ֱ�ӑ�(y��ng)���ڳ����a(ch��n)Ʒ�У�������Ҫ�Q���������֙C(j��)���R���ȡ�����Ic��ˇ����ı�������늙C(j��)�ߴ�С������늙C(j��)�c�(q��)��(d��ng)�����·�ܺõļ���
����(l��i)������ˇ�^(gu��)���^��(f��)�s��1992����ʡ�����W(xu��)[~X Arlita M1 Flynn���ڣ�H2mmx212~lm�ĵ�����\��Ĥ[һ���e20nm~J Ti�ӣ�Ȼ�����{460nm��Pt�������늘O���������z2���z������PZT��Ĥ�����w��Ĥ����플�늘O�����������в���늙C(j��)�����ӵ��⏽��2 mm����(n��i)����1 2 mm��늙C(j��)���D(zhu��n)�ٷ�����1(��(����3[)(����minp����
�����v���ı��ͳ�늙C(j��)����ģ�B(t��i)�D(zhu��n)�Q�͡�1999��M Suzuki��2Ӌ(j��)��һ�N���Ñұ����Y(ji��)��(g��u)�(q��)��(d��ng)���ͳ�늙C(j��)_6 J��ԓ늙C(j��)ֱ����2mm,~����0��3 mm���w�eO 49nm�������(q��)��(d��ng)늉�(��һ��ֵ)��18v�r(sh��)�����_(d��)3 2uN��in o(��hang_Bun Yoon����2007~�ß����ԾGɫ��lj���l(f��)����һ�N�ͻ����L(f��ng)܇�ͳ�늙C(j��)������ԓ늙C(j��)������һ��(g��)�L(f��ng)܇�͵ĉ���մɱP���ں�ȷ���tʩ�ӽ�׃�J�����P�ĵĵ��ڌ������\(y��n)��(d��ng)�D(zhu��n)�Q�������\(y��n)��(d��ng)����(d��o)���D(zhu��n)r���D(zhu��n)��ԓ늙C(j��)���(q��)��(d��ng)늉�(��һ��ֵ)��60V F��
�����D(zhu��n)��~3000mm��
�����Ͽ��Կ������Ώ����u�^�в�늙C(j��)�о����^�࣬ȡ����һЩ�ɹ������F(xi��n)��һЩ�ɹ���(y��ng)�õ�ɣ������������늙C(j��)����Y(ji��)��(g��u)���c(di��n)Ҳ�u�u������(gu��)��(n��i)��W(xu��)�ߵ���ҕ�����˶��ǻ������M(j��n)��
��|_Lˇ���@�o����늙C(j��)���ƏV����(l��i)�˲�����Ӱ푡�
���������һ�N���ͽY(ji��)��(g��u)�ı�������늙C(j��)��늙C(j��)������һ��(g��)����4��(g��)б�X�ı��ŭh(hu��n)����C(j��)�����r(sh��)�A�h(hu��n)���v�����(d��ng)��4��(g��)б�X���������(d��ng)�D(zhu��n)�Q���D(zhu��n)�ӵ����D(zhu��n)�\(y��n)��(d��ng)������ģ�B(t��i)�D(zhu��n)�Q�͡�ԓ�
�C(j��)�Y(ji��)��(g��u)��(ji��n)�Σ������ͻ������ڂ��y(t��ng)�ľ��и��T��ˇ���ӹ��ɱ��͡�����������أ�����˶��������(d��ng)ģ�B(t��i)�������ˡ��_(t��i)�әC(j��)�����y(c��)ԇ������D(zhu��n)�Ϳ��d���ԡ�
1늙C(j��)�\(y��n)��(d��ng)�C(j��)��
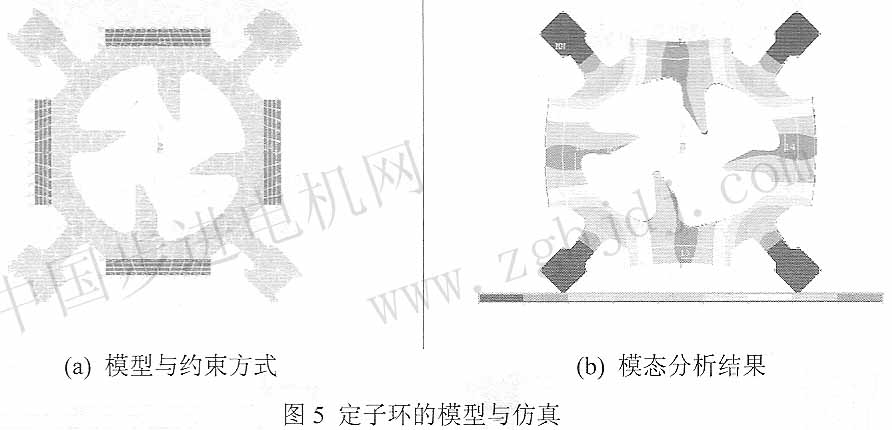
�����������늙C(j��)���\(y��n)��(d��ng)�C(j��)����D2��ʾ�����A�h(hu��n)�ڶ��l��r��(hu��)���F(xi��n)����s���(d��ng)ģ�B(t��i)(�D2 a)�����A�h(hu��n)���v��ʽ���(d��ng)����4����(ji��)�c(di��n)���ɹ�(ji��)�c(di��n)���c(di��n)(����)̎�����(d��ng)�(qi��ng)�ң���(y��ng)׃���Ҳ�����ڿ����h(hu��n)����̎����һ��(g��)�X(�D2_b)���h(hu��n)��(n��i)�a(ch��n)���v�����(d��ng)���X��c(di��n)���绡���\(y��n)��(d��ng)����һ��(g��)�����\(y��n)��(d��ng)�����������@�������(q��)��(d��ng)�c����ͬ�ĵĈA�����D(zhu��n)�����D(zhu��n)��
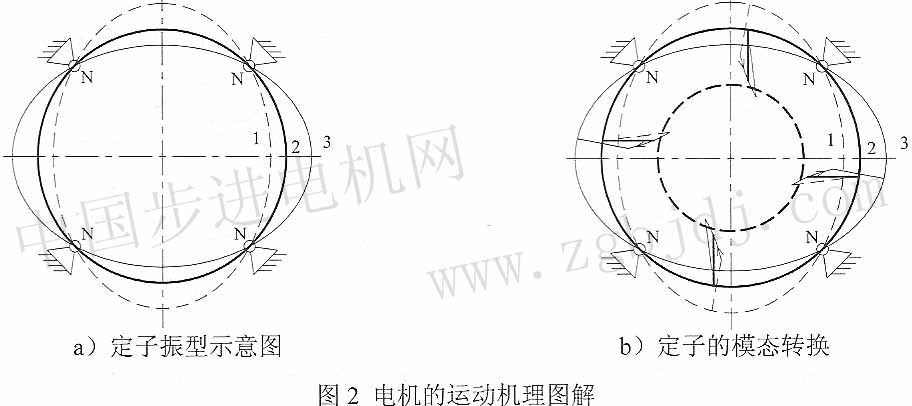
����(j��)����ԭ�����O(sh��)Ӌ(j��)�ı�������늙C(j��)���\(y��n)��(d��ng)�^(gu��)�����£�
��һ�ڣ��M����X�տs���v����X���L(zh��ng)���M����X�⌦(du��)�D(zhu��n)�ӵ����������Ħ���������(q��)��(d��ng)���Ƅ�(d��ng)�D(zhu��n)�����D(zhu��n)�� ��һ�ۣ�4�X�֏�(f��)���˕r(sh��)�v����X߀�](m��i)�Џ�(f��)λ���M��ă��X�⌦(du��)�D(zhu��n)�ӵ�Ħ������(hu��)ʹ�D(zhu��n)�ӷ������D(zhu��n)��Ħ����ԽС���������D(zhu��n)Խ�٣���һ�ܣ��M����X���L(zh��ng)���v����X�տs���v����X�����D(zhu��n)�ӵ����������Ħ���������(q��)��(d��ng)���Ƅ�(d��ng)�D(zhu��n)�����D(zhu��n)����һ�ݣ�4�X�֏�(f��)���˕r(sh��)�M����X߀�](m��i)�Џ�(f��)λ���v��ă��X�⌦(du��)�D(zhu��n)�˵�Ħ������(hu��)ʹ�D(zhu��n)�ӷ������D(zhu��n)��Ħ����ԽС���������D(zhu��n)Խ�٣�
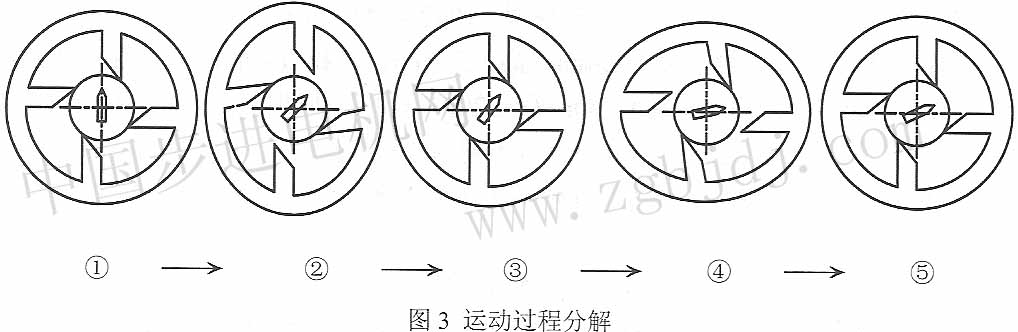
��һ��(g��)���ڃ�(n��i)���\(y��n)��(d��ng)�^(gu��)�̷ֽ��п��Կ���ԓ늙C(j��)�����������c(di��n)�����Ӄ�(n��i)�a(ch��n)�������v��������ģ�B(t��i)�D(zhu��n)�Q����(l��i)�@�ù���ģ�B(t��i)�����ӏ�(f��)λ�r(sh��)Ħ������(hu��)ʹ�D(zhu��n)�ӷ��D(zhu��n)һ��(g��)С�Ƕȣ����ӭh(hu��n)�Ͼ���4��(g��)��(ji��)
�c(di��n)�����ڹ̶����ӣ�늙C(j��)ֻ�܆������D(zhu��n)��
2늙C(j��)�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
2 1�����O(sh��)Ӌ(j��)
���ӽY(ji��)��(g��u)��D2��a)��ʾ������ճ�N����մɣ��A�h(hu��n)�O(sh��)Ӌ(j��)�ɰ������Π����K�A�h(hu��n)��ճ�N\����մɵ��棬ճ�N�մɵ�߅��(hu��)����(y��ng)׃�������ȜpС�������ڜpС�C���l�ʡ���̶�����ξ�h(hu��n)��
�ڭh(hu��n)��ճ�N���ϵĹ�(ji��)�c(di��n)̎�����4��(g��)�����ͬ���X(����׃�s���l��������Ӱ����(d��ng)ģ�B(t��i))�������X�˲�ͻ�𣬱����b��r(sh��)���̶��ֵĶ˲��̶���늙C(j��)���С�
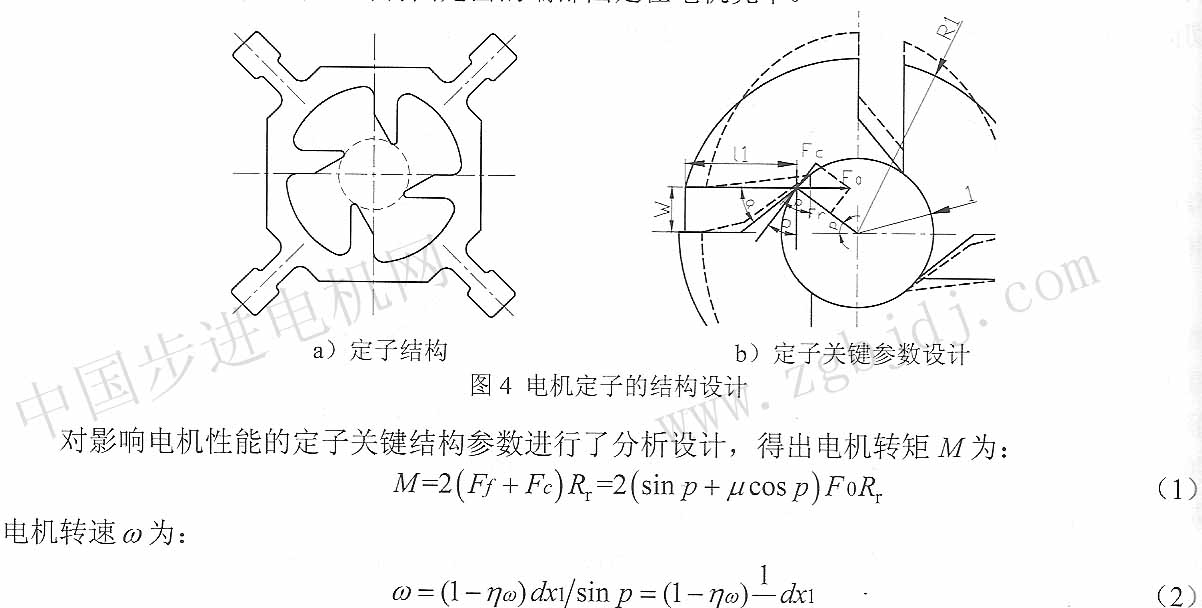
a)����Y(ji��)��(g��u) b)�����P(gu��n)�I����(sh��)�O(sh��)Ӌ(j��)
���Ӳ����x�����^�õIJ��P䓣����ܶȣ�9=7 8��10��k��m��������ģ����E=206Gpa��������v=O 3��ʹ��ANsYsܛ����(du��)��K���˽Y(ji��)��(g��u)�M(j��n)���˽�ģ���������鶨�˵Ĺ̶��XҪ���̶�����C(j��)���У������r(sh��)��(y��ng)��(du��)�̶��X��Ŀ�ɶ��M(j��n)�����ơ����ӭh(hu��n)��ģ�ͺͼs����ʽ����5 a)��ģ�B(t��i)�������Y(ji��)����D5 b)��ʾ��ģ�B(t��i)�������ó�ԓ�A�����l�ʞ�49981Hz���^������.
2 2���C(j��)�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)
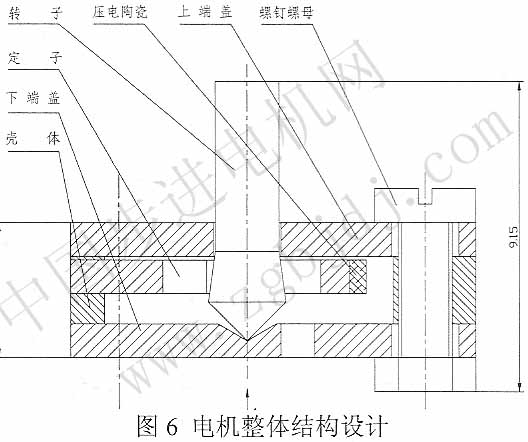
늙C(j��)���w�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)��D3һ19��ʾ�����w�Y(ji��)��(g��u)�ߴ���L(zh��ng)����ȷքe��10 4mm��lO��411]n1��9 15nlm����ȥ�D(zhu��n)�Ӹ߶�(�D(zhu��n)���L(zh��ng)���Ǹ���(j��)��Ҫ������)��늙C(j��)�x��4mm�����ӹ̶���늙C(j��)���ϵ���������϶��w���o���A(y��)�o������F���w�ď����ṩ���A(y��)�o���Ă��f·���飺���wһ�����wһ�D(zhu��n)��һ����һ�϶��wһ���һ���w�����ͨ�^(gu��)�{(di��o)���¶��w�ұ����ď����̶Ȼ����¶��w�͚��w�g���Ӊ|Ƭ��(l��i)�{(di��o)���A(y��)�o����С��
3늙C(j��)�M�b�c�y(c��)ԇ
3 1늙C(j��)�M�b
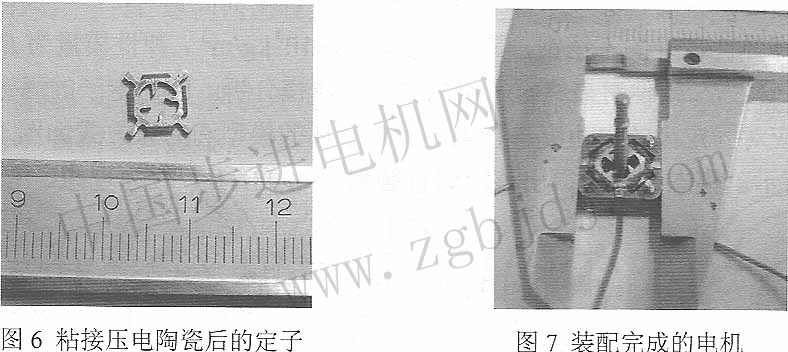
늙C(j��)���b���^(gu��)�̞飺���϶����b����һ�ęC(j��)���¶�ͱ���D(zhu��n)��һ���ʼn|Ƭһ�b�¶��wһ�{(di��o)��.
3 2늙C(j��)���d����
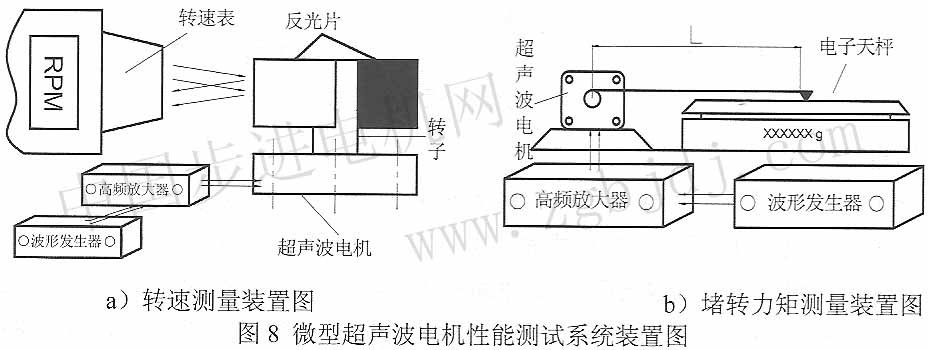
늙C(j��)�D(zhu��n)�����Ԝy(c��)ԇ�b����D8 a)��ʾ����늙C(j��)�S��ճ��Ƭ����Ƭ���÷���ʽ�ǽ��|ʽ�D(zhu��n)�ٱ�y(c��)��늙C(j��)�D(zhu��n)�١��@�ӷքe�Y��(ji��)���ΰl(f��)����ݔ����̖(h��o)���l��^��λ��Ŀ�����ֵp���Ϳ�j�Ԟ�
��늙C(j��)�ڲ�ͬ��B(t��i)�µ��D(zhu��n)��������������t���ա���һVpp
3��2��1�D(zhu��n)���S����(l��)�l�ʵ�׃��
�D9��a(ch��n))������λ��p=180���r(sh��)���քe�y(c��)�õ��ڼ���(l��)늉�Vpp-160V��200V��250V=�N��rF��늙C(j��)�Ŀ��d�D(zhu��n)���S����(l��)늉�Vpp��׃��������-N 9 b)���ڼ���(l��)늉�Vpp-200V�r(sh��)���քe�y(c��)�õ�����λ��P��60����120����180��V=�N��Ifft~T��늙C(j��)�Ŀ��d�D(zhu��n)���S����(l��)늉�Vpp��׃��������
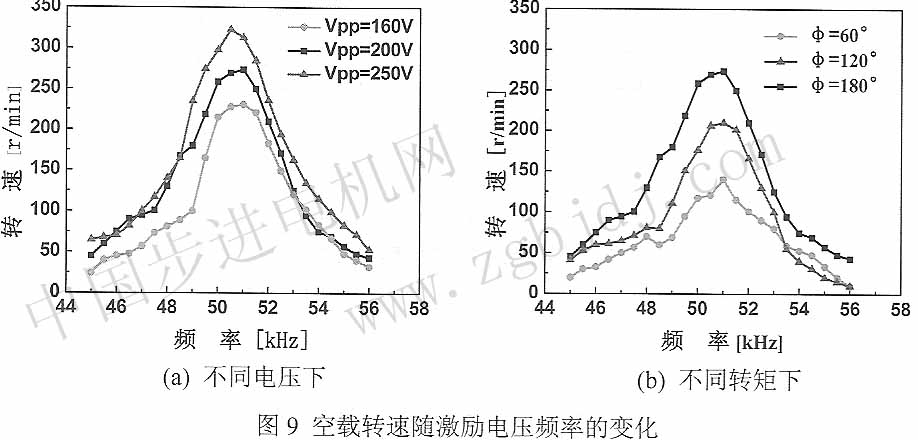
���Կ�����ԓ늙C(j��)�D(zhu��n)����f0 50��5kHz�r(sh��)****�D(zhu��n)�����Ԍ�(du��)�Q���C���l��f0-50��5kHz����ͬ������l���¿��d�D(zhu��n)��׃���Ĵ��wڅ��(sh��)������@�f(shu��)����(sh��)�(y��n)���õ��ĽY(ji��)�������^�õ��؏�(f��)�ԡ�
��2��2�D(zhu��n)���S��λ���׃��
�D10�����l�ʣ�����-50��5kHz������(l��)늉���(ch��ng)p=2[)(Jv�r(sh��)���y(c��)�õ�늙C(j��)���d�D(zhu��n)���S��λ��p��׃�����������Կ���������ԓ늙C(j��)���v����늙C(j��)����׃��λ��r(sh��)��늙C(j��)����(hu��)���D(zhu��n)��늙C(j��)����λ��180�ȡ�
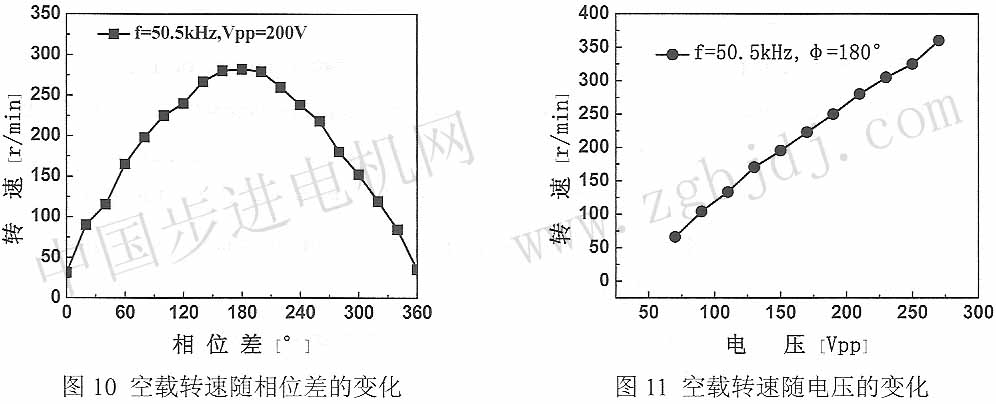
3 23�D(zhu��n)���S늉���׃��
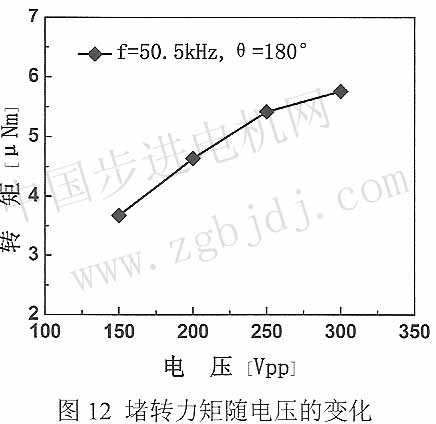
�D11�����l��~50��5kHz����λ��p=180���r(sh��)���y(c��)�õ�늙C(j��)���d�D(zhu��n)���S����(l��)늉���ӡ��׃��
�龀�����Կ���ԓ늙C(j��)�D(zhu��n)���S������(l��)늉�Vpp�����˶������Զ��^�á�
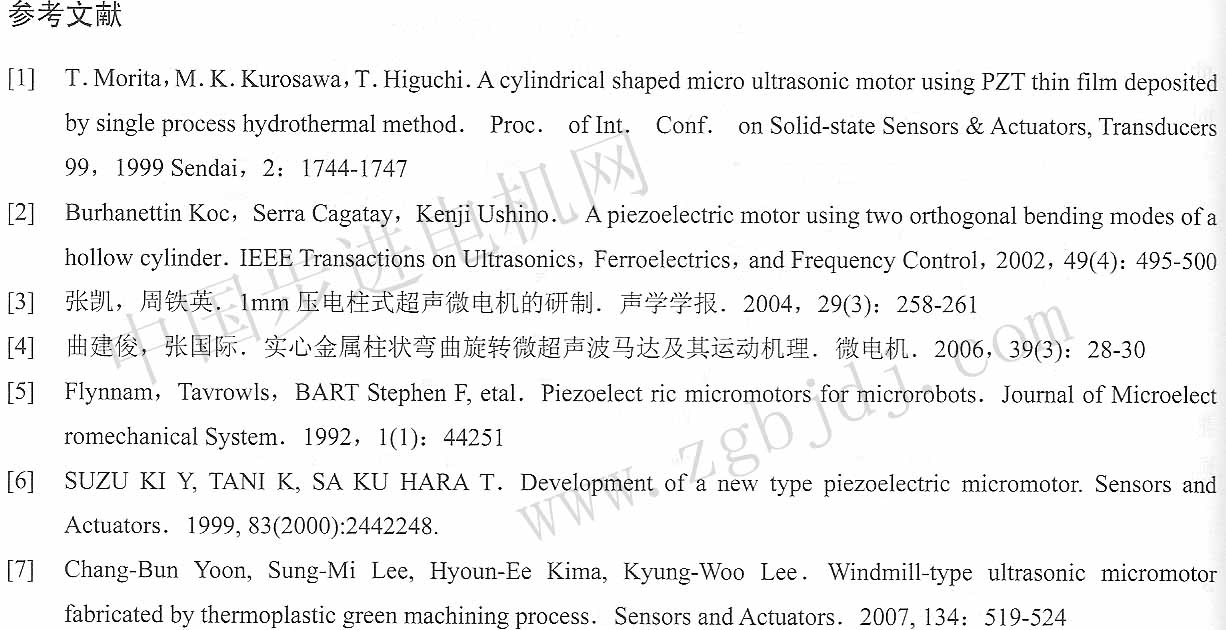
��3��3늙C(j��)���D(zhu��n)����
늙C(j��)���D(zhu��n)���y(c��)ԇ�b����D8��b)������������������Ҝy(c��)��늙C(j��)�S�ϵđұ��F�z�˲��ĉ���F��(l��i)Ӌ(j��)��늙C(j��)�Ķ��D(zhu��n)���ء��y(c��)ԇ�����ǣ����Θ�(bi��o)���ߜy(c��)���F�z�L(zh��ng)��L����늙C(j��)�������Ҹ�����
�ã����F�z�ѷŵ������бP�ϣ��������㣬���_(k��i)�Դ�_(k��i)�P(gu��n)��ӛF���ҷ�(w��n)���r(sh��)���x��(sh��)m���t���D(zhu��n)���ؿ�����A��=��21��(l��i)Ӌ(j��)�㡣 �D12�����l�ʣ�����-50��5kHz������λ��p=180���r(sh��)���y(c��)��늙C(j��)����(l��)늉���(ch��ng)p��150V,200V,250~r��3(1(1v���c(di��n)�Ķ��D(zhu��n)���ء����Կ�ɽԓ늙C(j��)���D(zhu��n)�����S������(l��)늉�f��p������������Զ��^�á�
4�Y(ji��)Փ
�O(sh��)Ӗ(x��n)��һ�N�»���ģ�B(t��i)�D(zhu��n)�Q���v���ͳ���늙C(j��)�����Ӻ��tE lmm,X~���b��ɵ�늙C(j��)�M(j��n)���˜y(c��)ԇ���õ���늙C(j��)���D(zhu��n)�����ԺͶ��D(zhu��n)���ء�ԓ늙C(j��)�C���l�ʞ�50 5kHz���D(zhu��n)������λ���180c
�r(sh��)****���ڼ���(l��)늉�Vpp=300V�r(sh��)�����d�D(zhu��n)�ٞ�320r��rain�����D(zhu��n)���؞�5��5uNto��
|











