��������PSS�Ą��ϵ�y��ģ�c����
���ı�1�����X��1����܊־1���T����2
(1���ϴ�W늚��c��ϢI�̌WԺ�������Lɳ410082;
2������Ϣ�I���g�WԺ�������Lɳ410200)
ժҪ���Y�ό��H�\��I_�r����MATLAB�h���£��ʴ_��������ͬ���l늙C���ϵ�yģ�ͣ������ɘӆ�Ԫ�����Ɔ�Ԫ���ʆ�Ԫ��ģ�͡��Ԅ���{����PlD���ƞ������ƣ�����������y������(Pss)���o�����ƣ����ڕ��B�l�����M�з��棬����Y��������PlD+Pss���ƵĄ��ϵ�y���НM���������ԣ��˷�r��ͨ����{���������Ƶ��l��ʎ�ȷ�����ڵIJ��㣬ʹ�l늙C�Ŀ��_�����������Ƶ��l��ʎ���ϻ֏͵����܃��چμ���PID���Ƅ��ϵ�y��
�P�I�~��ͬ���l늙C�����ϵ�y�����ϵ�y������
�ЈD���̖��TM341 �īI���R�a��A���¾�̖��1673_6540(2009)12 0006-04
O �� ��
���ϵ�y��ͬ���l늙C����Ҫ�M�ɲ��֣������ϵ�y�\�еĿɿ��Ժͷ���������ֱ��Ӱ푡���Ҏ��ŵ�������PID���Ʒ�ʽ�����ƺ��������ڌ��F���õ��˷dz��V���đ�����1�������μ��İ��C��늉�ƫ���M�е�PID���Ʒ�ʽ���o���ṩ���˝M����������ԣ��e�����ڿ��ƴ��͵İl늙C�C�M�r���������Բ���a���l�ĵ��l��ʎ�����{���ϵ�y�ķ����ԡ����ϵ�y������(Pss)��Ҫ�������Ƹɔ_��Ĺ�����ʎ����ϵ�y��·����˲�g�ĕ��B�^����ʹ���늉������ٶ�׃�죬�ӿ�l늙C��늉��Ļ֏͡�����MATLABƽ�_����������ͬ���l늙C���ϵ�yģ�ͣ�����PID+����Pss������Ɔ�Ԫ������Ӕ_�Ӻ������·���B�l���£������ϵ�y�M�з��档
1 ���ϵ�yģ��
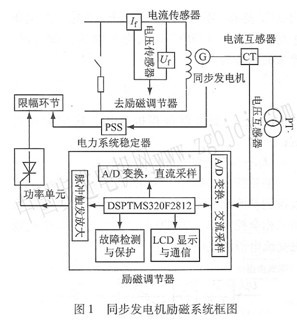
ͬ���l늙C���ϵ�y��D1��ʾ���Ʉ���{������Pss���l늙C�ȽM�ɡ�
ͬ���l늙Cݔ��늉��������늉������������������ݔ�뵽��̖�D�Qģ�K������A��D�D�Qͨ����ͬ�r�����늉����������̖�D�Qģ�K׃�Q������A��DоƬ���CcPu���ɘӵĽY���M�п����㷨�\�㣬�õ��Y��ݔ���}���{��(PwM)��̖����ع���|�l�O��ͨ�^���Ƅ�������С���{�����늉���Pss�ɼ��l늙C늹���ƫ����D��ƫ����^��̖׃�Q��̎���ȣ��c����{����
��ݔ�������h����ͬ�{�����늉������ϱO�y��LcD�@ʾģ�K���r�O�y���@ʾϵ�y��ݔ���ݔ����
1��1�����ɘӆ�Ԫģ��
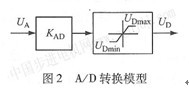
�����C��늉�������y��ģ�K������{��������Ҫ�ɘӵ�����������C�˾�늉��;���������늉�����������8·��̖���քe����ֱ���ɘӺͽ����ɘӡ�ÿ·��̖�y���·���֞�ɂ����֣�ģ�M׃�Q���ֺ�A��D�D�Q���֡�����ÿ·��̖��ģ�M׃�Q���֣������ڞV���·����˴����ӕr����һ�A�T�ԭh��1��(1+Ts)������������A��D�D�Q����ģ�M���D�Q�锵������������һ���Ŵ�h���������Ŵ�ϵ����
KAD=2n/Vref
ʽ�У�n����A/D�D�Q����λ����
Vref����A/D�D�Q���ą���늉���
A/D�D�Q����ģ����D2��ʾ��
�����C��늉��������C�������6·��̖���ý����ɘӡ��ɘӔ���̎���Ԫ��ܛ���팍�F������16�c�����~�㷨�������ɘӔ����M��̎����늉�����������IJ�ַ���չ�_���M��z׃�Q���ɵ�늉�������̓���Ă��f�������Ķ�������й����ʡ��o�����ʺ͟o�������
l.2���Ɔ�Ԫģ��
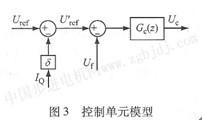
���Ɔ�Ԫ���{�����ĺ��ġ����Ͱl늙C�M�Ą��ϵ�yҪ���НM����������ԣ��Է�ֹ���F���l��ʎ��ͨ������PID+Pss���ơ�P1D��Ԫ�����{��ֺ�PID���Ʋ��֡��{����迼�]���l늙C�M�IJ��\��[1]���{��ֵ�ݔ�롢ݔ���Pϵ�飺
ʽ�У�U��ref�����C��늉��o��ֵ��
 �����{��ϵ����
IQ�����o�����ֵ��
Uref����PID�������o��ֵ
PID�������Ă��f�����飺
ʽ�У�KP��KI��KD�քe��������e�֣���ϵ����
PID�������Ă��f������Ge(z)���������ķ��������Եõ����Ɔ�Ԫ��ģ�Ϳ�D��Ҋ�D3��
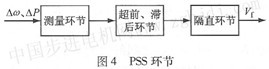
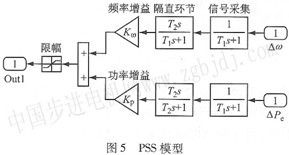
Pss���ðl늙C�D��ƫ��l��ƫ����ٹ���ƫ�늹���ƫ���е�һ����ׂ���̖(һ���ɂ�)�����^��̖׃�Q��̎�������Ԅӄ���{����(AER)�ĸ���ݔ�ˣ��a���������أ��_��������ϵ�y�ӑB�����Ե�Ŀ��[3]������Pss�����o�����ƭh����PSS�h���ɜy���h������ǰһ����h����ֱ�h�����ɣ���D4��ʾ��
�y���h��������̖�Ĝy���͞V������̖�ɼ��h���ɂ���������ɣ�����PSS�������l(0 1��3 Hz)�����ȵ���̖���MPSS[4]����ǰһ����h��������λ�a������ֱ�h���������Ǯ���̖��׃���_�����B�r��Pss��ݔ�����㡣��ҎPss�ԡ��؞�ݔ����̖��ʹ�õ��dz�ǰ�W�j����ǰ�W�j�ڸ��l������׃�����Ԍ��l늙CŤ����ʎ�O�����У�ʹŤ����ʎ���Ӈ��أ��ԡ�Pe����ݔ����̖���z�y���㣬���賬ǰ�Ƕ�С�������Ժã��ѵõ��V�����ã������ڷ��{�F���ԡ��غ͡�Peͬ�r��ݔ����̖������������a�����pС���{�F���Ӱ푣�ֻͨ�^�{��K�ء�KP��������С���a����λ��ǰ�ĸ���ͬ���D�أ���늉��{�����a������λ�����늴��D������λ���M���a��[4]�������Թ���ƫ���Pe���D��ƫ����؞�ݔ����̖��Pss��ģ����D5��ʾ��
����IEEE�P�������l��0.1~3Hz�r��PSS�Ђ�������ֱ�h�������]������5����T1=0~0.04,T2=0.5~50��,ȡT1=0.04��T2=15��K��=12��Kp=0.4��
1.3���ʆ�Ԫģ��
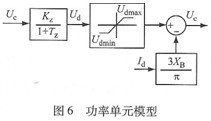
����{�����еĹ��ʆ�Ԫ������ȫ�����������ھ��l�ܹ����ǔ��m�ģ������ݔ���Ϳ�����̖֮�g���ڕr�������⣬����׃����©�Ќ����������׃������K���ã�߀��ҪӋ��©�������l���������Ӱ���2�������l�ܔ��m���ƬF�����ݔ��ƽ��늉�Ud�����ھ��l�ܿ���늉�Uc�������f����չ�_��̩�ռ�������ȥ�ߴ�헵õ�������Ă��f�����飺
����׃�����@�M����©��LB���������׃������K���á��{�������õ���������ʽȫ���������ړQ���^���У���Ȼ���ڃɂ���ꎘO��ꖘO�ľ��l��ͬ�r��ͨ����r������׃��������֮�g�a���h�����Ķ�����Udƽ��ֵ�Ľ��ͣ����͵�ֵ�á�Ud��ʾ�������]׃����©���r��ݔ����늉�ƽ��ֵ��Ud=1 35U2cosa���]׃����©���r�����µĉ����飺
ʽ�У�XB����׃����ÿ�����㵽���ȵ�©늿���
Id����ֱ����ݔ����ƽ�������
����{������������������������|�l�����Եõ����ʆ�Ԫ��ģ�ͣ���D6��ʾ���������������ȫ�ؘ�KZ��ֵ��l.35Ues��Ues��l늙C��Ž����Դ�ľ�늉���
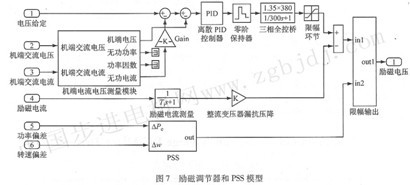
1��4�����O��
ͨ�^MATLAB��simulink�е�ģ�K����������{������ģ����D7��ʾ�����ϵ�y�ķ���ģ�Ͱ���ͬ���l늙Cģ�K���{����ģ�K������{����ģ�K������׃����ģ�K�������·ģ�K���o�F��ϵ�yģ�K�ȡ�ͬ���l늙Cݔ������ܽ�����׃�����c�o�F��ϵ�y���W���������·���l����ģ�M��·���ϡ�ͬ���l늙Cģ��ݔ������늺Ͱl늙C������ͨ�^늙C�������xģ�K�ɫ@ȡ�l늙C�Ą�����ֵ������{������ݔ������C�˽���늉����������������늉��o����ݔ��PSS�İl늙C�D��ƫ����ء�늹���ƫ���Pe��PSS��ݔ���̈́��ݔ�������h�����͵�ͬ���l늙C��ݔ���Vf��
�����O�ã�ͬ���l늙C����200 MvA��늉�UN=13��8 kV���D����͞��[�O��Xd(pu)=1��34��X��d (pu)=0��296��X����d (pu)=O��252��Xq (pu)=0��474��X��q(pu)=0��243��Xv(pu)=O .18��T��q (s)=1.01��T����q (s)=O��053��T����q (s)=O l��RS(pu)=0��002 584 4��H(s)=3��2���߉���ĸ��늉���110kV���������׃������ԭ����߅�~��늉�UIN��U2N�O�Þ�13��8 kV��110 kV������׃�������~������SN�O�Þ�210 kVA����·늉�UK�O�Þ�7��5�����o�F���Դ���~������SN�O�Þ�1 200 MvA��ؓ�d�O�Þ�500 Mw���~��늉�UN�O�Þ�110 kV���l늙C�C��ؓ���O�Þ�100Mg�����ڄ���{�����У�ģ�M׃�Q���֙C��늉����C������Ŵ�ϵ��KRȫ���O�Þ�0.005 9(���]�Ŵ�ԣ��)���r�g����TRȫ���O�Þ�1��s��A��D�D�Q����λ��n�O�Þ�12��A��D�D�Q���ą���늉�Vref�O�Þ�3��3������׃������©��XB�O�Þ�13����늉��o�������ֵݔ�롣
2����Y��
simulink�еķ����㷨�O�Þ�0de23tb�����沽�L���O�Þ�auto��
2��1�l늙C�����\�з���
���Ȳ��Æμ��İ��C��늉�ƫ���M�е�PID���Ʒ�ʽ�M�з��棬�õ�ͬ���l늙C�����\�еęC��늉�������D8��ʾ���IJ��ο��Կ������oPSS���ƕr���l늙C�����^���ЙC��늉���ֵ�����p���ӣ�����PSS+PID���ƕr���l늙C���_ʼ�\�е��C��늉������������^��ƽ�������v�ĕr�g�s��2��5 s���o��ʎ�ͳ��{���ij��F��
2��2��8���_�ӷ���
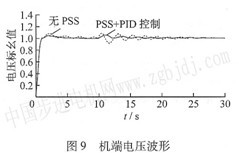
��������l0 s�r��8���Ĕ_�ӣ��õ�ͬ���l늙C�����\�еęC��늉�������D9��ʾ���IJ��οɿ����μ���PID���ƕr���ܵ��_�Ӳ��ӷ�ֵ�s��25 s��څ�ڷ�������HD+Pss���ƕr����_�Ӳ��ӷ�ֵС���s��15 s��څ�ڷ�����
2��3 PID+PSS���Ƶď������
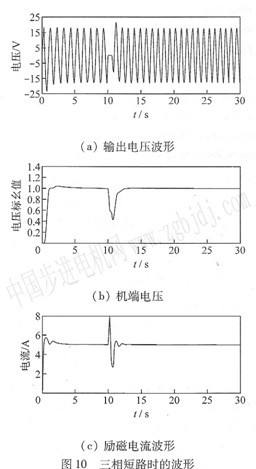
����Y������PSS���_���кܺõ��������á�����ͬ���l늙C�l�������·���ϕr����·늉��pС����������ڶ�·˲�g���C��늉������pС�������a�������Է����C��늉������Ԅ�������늉�����˲�g������S�֙C��늉�ƽ�⡣�ö�·���lģ�M���ϵ�y��·���ϣ�����·���l���]�ϕr���O����10 s�����^O.1 s������г����õ�ͬ���l늙Cݔ��늉�������D10(a)��ʾ��ݔ��늉�Ѹ��׃���㡣�C��늉���׃����DlO(b)��ʾ���l����·���ϕr��ݔ��늉�˲�g׃���㣬���C��늉�Ѹ���½���0 4���ң������г��C��늉�Ѹ�ٻ��������v�ĕr�g�s��2 5 s���^���^����늉�δ���F���{����
���ϵĄ�����������D10(c)��ʾ��������˲�������ԾS�֙C��늉�̎�ں㶨ˮƽ���������г�����Ѹ�ٻ֏͵�����������B��δ���F��ʎ�ͳ�������
3 �Y �Z
��������MATLABģ�K���Y�ό��H�\�Р�r�������˔���ʽͬ���l늙C����{��ϵ�y������ģ��ֱ�^���\���ٶȿ졢������
(1)�Y�ό��H�\�Р�r�����]���C�M���W�ğo���{��h��������׃����©�������ʆ�Ԫ��Ӱ푣�ʹ���ϵ�y��ģ���Ӝʴ_��
(2)����PID+����Pss���ƣ��˷��˳�ҎPss��PID���ƴ��ڵIJ��㣬�Ա��C��C�M�l늙C�ܷ��������\�У����ڔ_�Ӻ͕��B���Ͼ����^�������ƺ�푑��������ܼӿ�l늙C��늉��Ļ֏͡��S�֙C��늉�������������ϵ�y�������ԡ�����Y������Փ�������Ǻϣ��ܝM�����ͬ���l늙C��ſ��Ƶ�Ҫ����Ч��������ͨPID���ƵĄ���{����������Y��Ҳ��C�˄��ϵ�y�OӋ�����ĺ������c�����ԣ����M�Є���{������Pss��Ӳ���OӋ���������õĻ��A�� |