ժҪ���������p���l(f��)늙C�D(zhu��n)�ӂ�(c��)ʸ������ϵ�y(t��ng)�Ŀ���ģ�ͣ�ӑՓ�˻������Ӵň�����Ľ�����Ʒ������ڴ˻��A(ch��)�ό�ϵ�y(t��ng)�M���˷��棬ͨ�^������Y(ji��)���ķ�������C�˿��Ʋ��Ե����_�Ժ���Ч�ԡ�
����һ�N���Ͱl(f��)늼��g(sh��)���p���l(f��)늙C���F(xi��n)��׃�ٺ��l�İl(f��)���һ�N���͵İl(f��)늼��g(sh��)���dz��m�����L(f��ng)����ˮ���ȾGɫ��Դ�_�l(f��)�I(l��ng)�����������L(f��ng)���l(f��)늷��棬׃�ٺ��l�w�F(xi��n)�����@���ă�(y��u)Խ�Ժ͏V韵đ�(y��ng)��ǰ����
ɽ���p���l(f��)늙C׃�ٺ��l���Ʒ��������D(zhu��n)���·���F(xi��n)�ģ����^�D(zhu��n)���·�Ĺ������ɰl(f��)늙C���D(zhu��n)���\�з������Q�����D(zhu��n)��ʣ��H�鶨���~�����ʵ�һ���֣�������p����׃�Q���������H��l(f��)늙C������һС���֣��ɱ�������͡���������p���ͮ����l(f��)늙C�Ŀ��Ʒ������˿Ɍ��F(xi��n)׃�ٺ��l���ơ��pС׃�Q���������⣬�ڴň�����ʸ��������߀�Ɍ��F(xi��n)P��0�ⵜ���ƣ��M�����F(xi��n)�L(f��ng)���l(f��)��е�****�L(f��ng)��ۙ����늾W(w��ng)���Կ��o���a��?sh��)����á?/DIV>
�D(zhu��n)�ӂ�(c��)PwM׃�Q���Ŀ��ƌ������p���Б�(y��ng)�l(f��)늙C(D0ubly��Fed Induction Generator(DFIG))�����ˌ��F(xi��n)��Ч���ƣ���회��D(zhu��n)�ӂ�(c��)PwM׃�Q���Ŀ��ƌ���DFIG�M�г��r�⣬�Դ˞���A(ch��)�������D(zhu��n)�ӂ�(c��)PwM׃�Q�����Ʒ�������Փ���A(ch��)�������о����D(zhu��n)�ӂ�(c��)���ڶ��Ӵň������ʸ�����Ʒ���ģ�ͣ�����D FIG�и��N�й�����֮�g���P(gu��n)ϵ�M�з����������ҳ����F(xi��n)****�L(f��ng)��ۙ��DFIG�й�����֮�g���P(gu��n)ϵ�����F(xi��n)����ϵ�y(t��ng)����Ч�O(sh��)Ӌ��
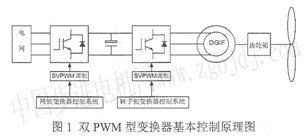
1�p���l(f��)늙C���pPwM׃�Q�����ƻ���ԭ��
ԓ�L(f��ng)���l(f��)�ϵ�y(t��ng)��ԭ����D1��ʾ�����õİl(f��)늙C���D(zhu��n)�ӽ�����ŵ��p���Б�(y��ng)�l(f��)늙C�������@�Mֱ�ӽ���늾W(w��ng)���D(zhu��n)���@�M���l�ʡ���ֵ����λ���{(di��o)���Դ���o������l�����������D(zhu��n)�����γ�һ���������D(zhu��n)�ň����@���ň����D(zhu��n)�ٶ��c�D(zhu��n)�ӵęCе�D(zhu��n)����ӵ��ڶ��Ӵň���ͬ���D(zhu��n)�١��Ķ��ڰl(f��)늙C�����@�M�иБ�(y��ng)��T�l늉���
��(d��ng)�L(f��ng)���C�τӰl(f��)늙C�D(zhu��n)���D(zhu��n)��nr��С�ڰl(f��)늙Cͬ���D(zhu��n)��n1���r���p���l(f��)늙C̎�ځ�ͬ���\�Р�B(t��i)���˕r�D(zhu��n)�����D(zhu��n)�ň��������D(zhu��n)�ӵ����D(zhu��n)�����c�D(zhu��n)�����D(zhu��n)������ͬ���pPWM׃�Q�����D(zhu��n)���ṩ������ţ�������늾W(w��ng)������ܣ��˕r�����pPWM׃�Q��늾W(w��ng)��(c��)��������B(t��i)���D(zhu��n)�ӂ�(c��)����׃��B(t��i)������Ʒ����ǻ��ڶ��Ӵň������ʸ��׃�Q���ƣ���(d��ng)�L(f��ng)���C�τӰl(f��)늙C�D(zhu��n)���D(zhu��n)��n�����ڰl(f��)늙Cͬ���D(zhu��n)��n1�r���p���l(f��)늙C̎�ڳ�ͬ���\�Р�B(t��i)���D(zhu��n)�����D(zhu��n)�ň��������D(zhu��n)�ӵ����D(zhu��n)�����c�D(zhu��n)�����D(zhu��n)�����෴���˕r�����D(zhu��n)�Ӿ���늾W(w��ng)������ܣ��˕r�����pPwM׃�Q���D(zhu��n)�ӂ�(c��)��������B(t��i)��늾W(w��ng)��(c��)����׃��B(t��i)������Ʒ���������늾W(w��ng)늉�����ʸ�����Ʒ�ʽ����(d��ng)�L(f��ng)���C�τӰl(f��)늙C�D(zhu��n)���D(zhu��n)��n�����ڰl(f��)늙Cͬ���D(zhu��n)��nr�r���pPwM׃�Q�����D(zhu��n)���ṩֱ����ţ��˕r늙C������ͨ�[�Oʽͬ���l(f��)늙C�\�С�
2���ڶ��Ӵň������ʸ�����Ʒ���
�c��ͨ�����ཻ��늙Cһ�ӣ������oֹ����(bi��o)ϵF DHG�Ĕ�(sh��)�W(xu��)ģ����һ�����A����׃�����Ǿ��ԡ�����ϵ�ϵ�y(t��ng)�����y�M�п���ϵ�y(t��ng)�ķ����c�O(sh��)Ӌ�����ˌ��F(xi��n)��DFIG�й����o�����ʵ���Ч���ƣ�_-�߱�횽������ɰѽ����{(di��o)���е�ʸ�����Ƽ��g(sh��)��(y��ng)����DFIG���й����o����������У���ͨ�^����(bi��o)׃�Q��ʹ�D(zhu��n)��������й������c�o���������F(xi��n)��������D(zhu��n)��������й������͟o�������Ϳ��Ԍ��F(xi��n)DFIG���й��͟o�����ʵ���Ч��������ƣ��Ķ����F(xi��n)׃�ٺ��l�p���L(f��ng)���l(f��)�ϵ�y(t��ng)�Ŀ���Ŀ��(bi��o)��
�����Ќ��oֹ����(bi��o)ϵ�µ�DFIG��(sh��)�W(xu��)ģ�ͣ����˱��ڷ������}��ͨ�������µļ��O(sh��)��1)���Կ��g�C�����O(sh��)�����@�M���Q���ڿ��g�л���120��늽Ƕȣ����a(ch��n)���Ĵńӄ��ؚ�϶������Ҏ(gu��)�ɷֲ���2)���Դ�·ͣ��J(r��n)����@�M���Ըкͻ��ж��Ǻ㶨�ģ�3)�����F�ēp�ģ�4)�����]�l��׃���͜ض�׃�����@�M����Ӱ푣�5)��o�e�f�����D(zhu��n)�ӂ�(c��)�ą���(sh��)���ǽ�(j��ng)�^���㵽���ӂ�(c��)�ą���(sh��)�������Ķ��Ӻ��D(zhu��n)���@�M�є�(sh��)��ȡ�
(1)늉�����
���ඨ��늉����̞飺
ʽ�У�uA��uB��uC��ua��ub��uc�քe�鶨���D(zhu��n)����늉�˲�rֵ��iA��iB��iC��ia��ib��ic�քe�鶨���D(zhu��n)�����
��˲�rֵ����A����B����C����a����b����c�քe�鶨���D(zhu��n)�Ӹ���@�M��朡�
�����D(zhu��n)��������ʽ��
u-Ri-p�� ��3��
(2)��朷���
ʽ�У�Lms�Ƕ���һ���@�M��朵�****���д�ͨ������(y��ng)�Ķ��ӻ���ֵ��Lmr�����D(zhu��n)��һ���@�M��朵�****���д�ͨ������(y��ng)�Ķ����߸�ֵ��Lls��Llr�քe�鶨���D(zhu��n)��©늸У��Ȟ��D(zhu��n)�ӵ�λ�ýǡ�
(3)�D(zhu��n)�ط���
�\�ӷ���
ʽ�У�TL���L(f��ng)���C�ṩ���τ��D(zhu��n)��;J��C�M���D(zhu��n)�ӑT����
�Mһ�����oֹ����(bi��o)ϵ�µ�DFIG��(sh��)�W(xu��)ģ���D(zhu��n)����ͬ�����D(zhu��n)����(bi��o)ϵ�£���늉����̺ʹ�朷��̞飺
���]���p��늙C��Փ��늄Ӡ�B(t��i)߀�ǰl(f��)늠�B(t��i)����ʼ�K�\���ڹ��l50Hz�ӵ��l���£�������艺���h(yu��n)��늿�������늙C��늄�С��ͨ�����Ժ���늙C�����@�M��衣�ɶ���늉����_(d��)ʽ���Կ���������늙C�����@�M�����Ӵ��?zh��n)����?SUB>1���ȶ���늉�ʸ��u��****90����(d��ng)�x��M��T����(bi��o)ϵ��M�S�ئ�1����r���У�
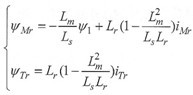
�����M�аl(f��)늙C�й�����P�͟o������Q�Ī����{(di��o)��(ji��)������M-T����(bi��o)ϵ�°l(f��)늙C���ӵĹ��ʱ��_(d��)ʽ�飺
ʽ�У�3/2�鰴ģ��׃ԭ�t���������(bi��o)׃�Qϵ��(sh��)����ʽ��9�����루11���ã�
����(j��)��朷��̣�8����(d��o)�����Ӵ�朷��̲��ó���
�D(zhu��n)�Ӵ�朷����D(zhu��n)���У�
����(j��)ͬ�����D(zhu��n)늉����̵õ��D(zhu��n)��늉����̣�
ʽ�У�

��
�錍�F(xi��n)�D(zhu��n)��늉������������ƵĽ���헣���umr, ��umr������M��T�S�D(zhu��n)��늉�����������g������ϵ��a��헡����D(zhu��n)��늉��ֽ�����헺��a��헣��ͫ@�Ì���P��Q�����{(di��o)��(ji��)��M-T����(bi��o)ϵ�е��D(zhu��n)�ӷ���늉���ͨ�^2��/3�����D(zhu��n)׃�Q���ɵõ��l(f��)늙C�D(zhu��n)������늉�����늉����������׃�l�Դ�����PWMָ�����PWM׃�l���a(ch��n)�������l�ʡ���С����λ�����ཻ�����늉����Ϳ���K���F(xi��n)�l(f��)늙C���ʿ��ƣ��D(zhu��n)���{(di��o)��(ji��)�Լ�****�L(f��ng)�ܲ��@�\�С�
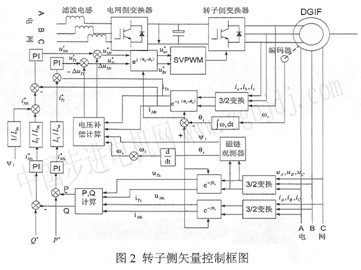
�������Ӵ�朶���ʸ������ϵ�y(t��ng)�Ŀ��ƿ���D2��ʾ���ɈD��Ҋ������ϵ�y(t��ng)�����p�]�h(hu��n)�Y(ji��)��ԭ�t�o�����o��ָ��Q����(j��)늾W(w��ng)Ҫ���O(sh��)��rc��ֵ�M�б��^����ֵ��(j��ng)PI�����{(di��o)��(ji��)���\�㣬�õ���������й������͟o������ָ��imr��its���Mһ��Ӌ��õ��D(zhu��n)������й��͟o������ָ��imr ��iTr��imr ��iTr �c�D(zhu��n)���������ֵimr��imr��its���^��(j��ng)PI������{(di��o)��(ji��)������ݔ���D(zhu��n)��늉�����헡�uMr��uTr�������D(zhu��n)��늉��a��헡�uMr�͡�uTr�͵õ��D(zhu��n)�ӄ���Դ��늉�����ָ��uMr��uTr������(bi��o)���D(zhu��n)׃�Q���趨�Ӵ�朿��gλ�æ�s�Լ��D(zhu��n)��λ�ýǦ�r����ͨ�^���Ӵ�朦�1�^�y�����D(zhu��n)��ͬ�S��늾��a���õ���
3�D(zhu��n)�ӂ�(c��)׃�Q�����Ʒ���
������CՓ����Փ�����ͽ�ģ�����_�ԣ��\������(g��u)���Ľ������׃�ٺ��l�L(f��ng)���l(f��)�ϵ�y(t��ng)����ģ���M����****�L(f��ng)��ۙ���Ʒ���ķ����о����������õ���һ�_���a(ch��n)��8kw��380v��50Hz��6�O늙C����(j��ng)�����ą���(sh��)���£��������2. 8�����Ը�0. 286H���D(zhu��n)�����2 .52Q���Ը�0 286H������늸�(����)0. 270H���D(zhu��n)�ӑT��O. ool kg m2��
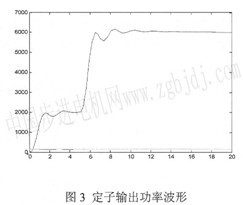
���ȼٶ��L(f��ng)�ٞ�4 5m��s������(y��ng)���p���l(f��)늙C����ݔ�������й����ʞ�2kw����5s���L(f��ng)��������7��5 m��s������(y��ng)���p���l(f��)늙C����ݔ�������й������S׃?y��u)?kw�������^�̵Ķ��Ӆ����o�����ʞ�150Var���D3�鶨��ݔ�����ʵķ��沨�Σ�����P1��׃���w�F(xi��n)��****�L(f��ng)�ܵ�ۙ��r����P1׃���rQ1���ֲ�׃���������F(xi��n)��****�L(f��ng)��ۙ��߀���F(xi��n)��P��Q���
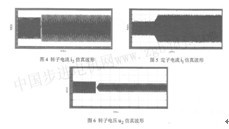
�D4���D5��DHG�D(zhu��n)�����i2�Ͷ������i1���沨�Ρ��S���D(zhu��n)�ӽ��ٶȵ�׃����i2���l�ʰl(f��)��׃������(d��ng)�D(zhu��n)�ӽ��ٶȽӽ�ͬ�����ٶȕr��i2���l�ʽӽ�����. i1���l�ʲ����D(zhu��n)�ӽ��ٶ�׃����Ӱ푣�ʼ�K���֞鹤�l50Hz����(d��ng)�D(zhu��n)�ӽ��ٶ�׃���r��ͨ�^��׃i2���l�ʱ��Ci1�l�ʺ㶨���@���ǡ�׃�ٺ��l���Ļ���ԭ�����S���D(zhu��n)�ӽ��ٶȵ�׃����i1��ֵ�l(f��)�����@��׃������늾W(w��ng)늉��㶨�ėl���£�i1��ֵ׃����ӳ��P1��׃�����D6��DFIG�D(zhu��n)��늉�u2��׃���^�̡��������^���У�
I2��u2���ķ�ֵ���l�ʡ���λ�l(f��)ţ׃����ͨ�^�{(di��o)��(ji��)�D(zhu��n)�ӄ��늉�������ķ�ֵ���l�ʡ���λ�����F(xi��n)DFIG��׃�ٺ��l�\�к�P��Q������ƣ��@���ǡ�������š��ı��|(zh��)�̓�(y��u)�ݡ�
4�Y(ji��)Փ
���ĽY(ji��)�Ͻ�����Űl(f��)늺�ʸ��׃�Q���Ƶă�(y��u)�c���������pPWM׃�l����늵��p���l(f��)늙C����ϵ�y(t��ng)�D(zhu��n)�ӂ�(c��)׃�Q��ģ�ͣ�����ԓϵ�y(t��ng)�M�����^��ȫ��ķ����о����Y(ji��)�������������о����@�õĽ������׃�ٺ��l�L(f��ng)���l(f��)�ϵ�y(t��ng)����Փ�����Ϳ��Ʋ��������_�ģ����еģ����Ժ�Č���о�����ָ��(d��o)���x��
�����īI
[1]�����࣬���Ą٣���־���pPWM׃�l���g(sh��)�đ�(y��ng)���о�׃�l�����磬2008��(7)
[2]ꐕ��������������O����DSP�������pPWM׃�l�{(di��o)��ϵ�y(t��ng)���о���2004��V���Ԅӻ��W(xu��)���W(xu��)�g(sh��)���Փ�ļ���2004��
[3] ���������W(xu��)�V����������ֱ���pPWM׃�Q�����L(f��ng)���l(f��)��еđ�(y��ng)���c�l(f��)չ2006�Ї��ƅf(xi��)���Փ�ļ�����)��2006��
[4] �S���A�����ܟo�������ף���20kw׃�ٺ��l�L(f��ng)���l(f��)늙C���\�м������늹�����¼��g(sh��)��1992��(1)
[5] �~��ұ�L(f��ng)���l(f��)늙C�M�Ŀ��Ƽ��g(sh��)���������Cе���I(y��)�����磬2002
���n�}���|��ʡ�����ƌW(xu��)��ʮһ�塱Ҏ(gu��)������n�}