�dz��B�h���µij�늙C�о��c����
ժҪ����늙C���е��ٴ�Ť�ء��Y�����������p�����ȸߡ�������i�՟o�ň��ɔ_�ȃ����٣�ʹ�������⑪����ȡ��С�͂��y늴�늙C�����ڷdz��B�h���¾��ЏV韵đ���ǰ�����������Ȍ��dz��B�h���M�н綨���ͷdz��B�h���µij�늙C�о��Ďׂ��P�I���}���������ķdz��B�³��R늙C�о��F��չ�_Փ����������e�˳�늙C�ڷdz��B�µĵ��͑��ã�������Mһ���о��Ć��}��
�P�I�~����늙C����գ��ߜأ��͜�
O����
��늙C(ultrasonic Motor�����QusM)�ǽ���Ħ�����f���Գ�������ԫ@�Ä������әC�����������É���մɵ��扺�Ч����ʹ���ӏ����w����a�����ЙE�A�\��܉�E�|�c�ij������(����l��>20KHz)��ͨ�^���|Ħ�������Ӊ��ڶ��ӱ�����D�Ƅ��w�\�ӡ��c���y��늴�ʽ늙C��ȣ���늙C���н�ص�ٴ��D��(��ֱ����)���Y������(˾�ͻ�)���o늴��_���߷ֱ���(�Ɍ��F���_��λ)��Ħ�����i������ֹͣ푑��졢Ѭ���p���������Լ��͵͜���յ��m��̫�խh���ă��c��ʹ��늙C��Щ�����I����ЏV韵đ���ǰ����Ŀǰ����늙C�ѽ��ں��պ��졢���܃x���Ԅӿ��ơ��͙Cеϵ�y�����ӹ��O��Ķ�λ�C�����C���˵��P�����Լ��k���Ԅӻ��O����T���I��õ����H���á�
Ŀǰ���dz��B�h���³�늙C�о���Ҫ�Ǒ�����̫��h��������߀�����ڹ�W���܃x���еľ۽�����λ�ȡ���̫��̽�y�C���У����d���g��늹���ʮ�����ޡ�������һ���l�������d�x��������ҪС��100w���������oÿ��������늹��ʃH��O .1��10w֮�g������Ƕ���|���ĸ߳ɱ���̫����������Ҫ�^�ߵ�ݔ�������|���ȡ����⣬̫�խh���l���o���˸������ƣ�����Ҫ�y�}�ǿ˷��l��r����Ӻ͛_�������͵���Ӽ��eͨ����20g nns�������횷������P�\���|������������������⣬��¶��̫ꖹ�Fʹ�ض�׃�������^��һ������ڡ�150�桫150�档����ˮ�Ǻ�ľ��̽�y���У��ضȕ����ߣ����ڻ���̽�y�΄��У��ضȕ����͡�����ݗ��Ҳ�Ǽ��g���y֮һ���b������ԭ����̫��̽�y�΄ռ����m�������܃�������������늙C�����cǡ���c̫���������������Ǻϡ����⣬�ڹ�W�����У���N�@�R(����sEM��TEM��EB��)���R�^�ع�������խh���£���Ҫ�R�^�{���������ܹ�����ԓ�h���£����܌��F���ܶ�λ���ܡ����ʹ����̫�ա��@�R�ȷdz��B�h���µij�늙C�����о������ɞ�Ŀǰ��늙C�о��ğ��c��
1�dz��B�Ľ綨
�dz��B�h����ָ��ա��ߵؘ͜O�ޭh���Լ�ݗ�������h����������ČW�g�硢��������I����о��ˆT������Եđ��Ì�����о��������о���늙C������M�ϵĘO�ޭh���µ����ԡ�
�ڷdz��B�h���У�������͵͜حh�������̣���늙C������պߜحh���µ����Լ������������յ͜حh���µij�늙C���ԣ�����^�١�����ᘌ���늙C�����ʵ͜����ԣ��C���ˇ�����W���о��ķ������P�I���}�͑��á�
2�����
�ڌ��dz��B�µij�늙C�о������_���о��������ֶ��ǫ@����Ч�о��������P�I���ׂ��о��C���քe������P���о��b�á�1998�꣬�ձ��|�����I_�ˌW��ʯ��Т���������ȴ����խh���ij�늙C��������ԇ�ϵ�y(��D1��ʾ)��ԓϵ�y���ÙCе��1���팍�FlPa����գ�0�ÙCе�ú͔Uɢ�ù�ͬ�����팍�F1��10Pa����ա�
2002�꣬����������ոߜس�늙C�yԇ�b�á�ԓ�b�����ÙCе�ù����팍�F1Pa�ĵ���գ����ÙCе�ú͔Uɢ�ù�ͬ�����팍�F5��10��Pa������գ��������u���ӟ᷽����iG~E+15()c�ĸ�}N o 2006ԓ�b�ø��M����յ͜�ԇ�ϵ�y��������Һ����������b�ü���늙C����
����ԇ�b�ã���D2��ʾ��ԓϵ�y��ʹ���ǻ�Ȍ��F�ij����������5��10�ij��ص��͜�һ192����B�m׃������늙C���Ʋ��ֿ��Ԍ��r�ɼ���ӛ䛼��@ʾ��늙C���D�١��D�ء�늙C�ضȡ��h���ضȵ���Ϣ������늙C���Ԝyԇ�_�������ǻ�ȣ���D3��ʾ��

4��P�I���}
4 1�dz��B�µ��������о�
ᘌ��dz��B�h������늙C��Ӱ����أ��ҳ��dz��B���c���B�³�늙C�����ԵIJ�ͬ�c��������խh�����՚�ϡ���� ������K����ɢ�ᣬ��һ�����֜pС�����Ҹ��F���ڵ͜حh���£��͜�ʹ�����c����մɵ��z��׃�࣬��Ӱ푉���մɵĉ�늳��������F�ij���C���D�ӽ��|�����a��ճ���F��ȡ���ˣ�������W�ߏķdz��B�µij�늙C�����Ԝyԇ���֣�������dz��B�h��F��늙C������׃�����Ķ�ָ�������M��늙C�ĽY���OӋ��
1998�꣬�ձ��|���ϘI��W��ʯ��Т��f 8]�������Ȍ�����еij�늙C���������M���ˌ�������Ish���˰ѿvŤ�ͺ��ͳ�늙C���b�����ǻ�ȣ��mȻ���ڳ�늙CጷŚ��w��ʹ��������l���o�����F������������Փ�����������l��F��늙C�����Ե����M�^�c���Ұl�F�c���B��ȣ�������³�늙C�D�ء��D�پ��pС��2004 �꣬���A��W���Ŝyԇ������в��ͳ�늙C�����D�ӽ��|��B���J�����µ��Ҹ����^�ˣ�ʹ�����D���g���x�r�g����յ��L��
2005�꣬������ոߜؗl���µ�60�P���в��ͳ�늙C�����M����ԇ��о����yԇ���A�o������նȡ�Ħ�����ό���늙C�Cе���Ժ��D�ٷ����͵�Ӱ�(�D4���D5)���Y����������
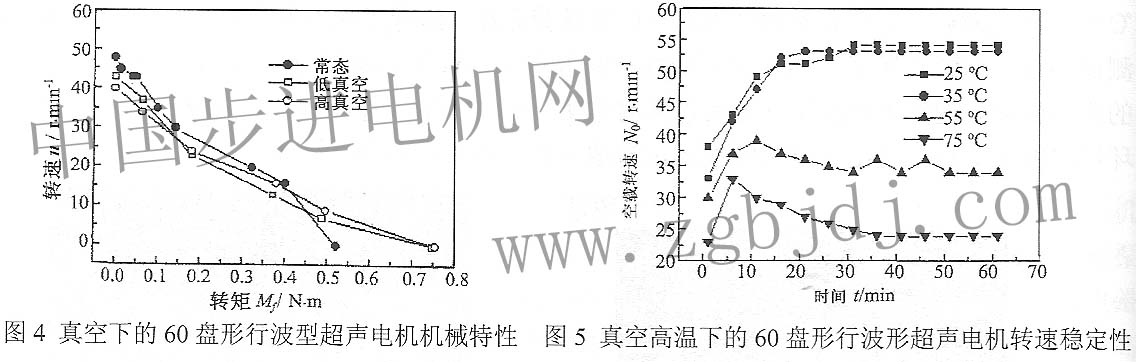
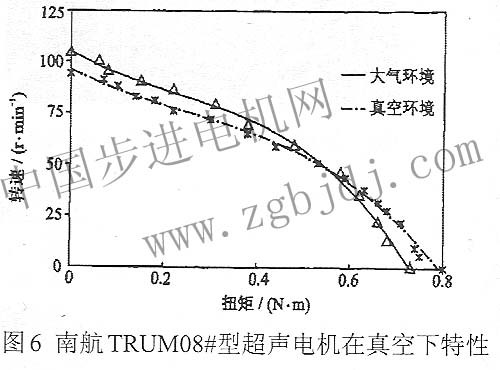
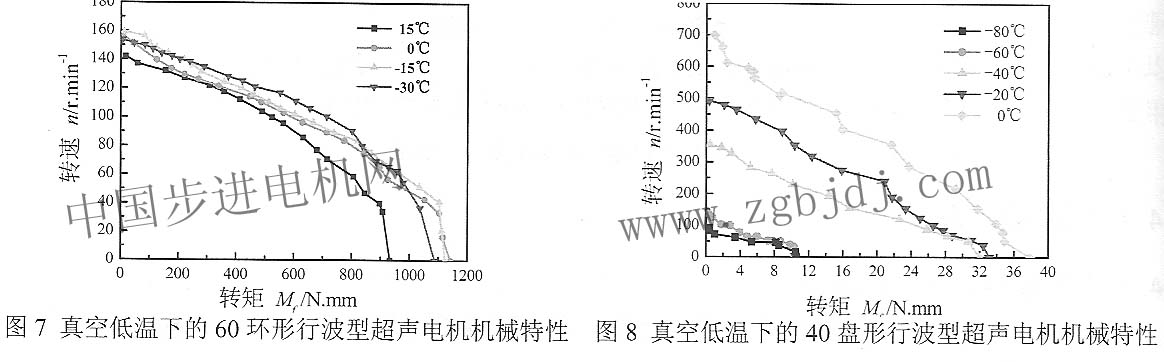
��ոߜ��µ�60�P���в��γ�늙C�D�ٷ�������l���£��S���A�o������ն����ӣ�늙C���D���������d�D�ٽ��ͣ�ؓ�d��������׃��ƽ�����S���h���ض����ߣ�늙C���d�D��F������Ħ�������ĥ�p�p�p��2006�꣬�Ͼ����պ����W���Ȝyԇ��1Pa����l���h���в��ͳ�늙C��ؓ�d���ԣ��Y����������³�늙C�Ķ��D���رȳ��B�Դ�(�D6)~2008~������������յ͜حh���l���£��yԇ�˖|�ϴ�W60�h���в��ͳ�늙C��������40�P���в��ͳ�늙C�ęCе����(�D7���D8)����������ͨ�z�͵͜��zճ�Y���Ӻ͉���մɣ����x�õ͜��zճ��ճ�Y���Ӻ͉���մɡ�
4.2���ͳ�늙C�Y��
�о��m���ڷdz��BF�����ͳ�늙C��Ҳ�LJ�����W���о����P�I���}֮һ����Ҫ���]�Y�����λ������εĽY���M�ɣ��ȿɜp���ڷdz��B��ʧЧ�Ŀ����ԣ���������ӵ��`���ԡ�2005g��=,New ScaleTechͬ�cNASAһ�����_�l���͜س�늙ClJ��J��Ҋ�D9���@�N��{늙C�ĽY�������ģ�B��D10��ʾ�����������N�Љ���մɵ���ĸ���ӿ�������������Ȳ��D�������M�ɣ�����d31���ģ�B��늙Cֱ= q~8mm��{q 20mm�����г��k~15ranl���ֱ��ң�20nm�����ʣ�0��001��lI��m��s��ŤJ]2��5N��ԓ늙C���ڏ��Ҝص�һ269~��C(֮�g�B�m������

�D��N 9������յ͜س�늙C
4 3����մɲ���
�о����͵ġ��ܜض�Ӱ��С�ģ��Լ��ͷŚ��Եĉ���մɲ��ϡ����ȣ�����մɵĽ�늳������IеƷ�|���S�ضȵĽ��Ͷ��pС���Ķ�ʹ����մ�����׃�������մɵ�����ֱ��Ӱ푳���늙C�������ԡ���ˣ��_�l���͵��m���ڸߵ͜�ʹ�û�����Ӱ��^С�ĉ���մɣ������ڷdz��B�³�늙C�Č��û�����Σ�����մ��Ƕ�ķ�ĩ���Y���ϣ�������Е��a���Ś�F�������о��ͷŚ��Ե�J��늲��ό���늙C�ڹ�W�x������խh���µđ��þ�����Ҫ���x��
1999�꣬JPL��Barcohen��_J������յ͜��yԇ�˳�늙C�ĉ������䶨�ӽY����D11��ʾ��
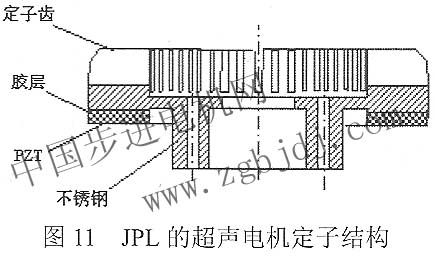
����������������늙C���酢�գ����ձ�������˾��USR30���ڵ͜�һ150������2Pa�ėl���£����\��67С�r��ʧЧ�������������Y�˴�늙CʧЧ��ԭ�������ډ���մɭh���������ɡ����ˣ�������JPL��O��M1 a늙C����մɭh�ijɷֶ�ʽ���Dճ�N���Ӿ�Ƭ��������늙C��������͜����\��336С�r��ʧЧ��������һ80~C3Pa���\��65С�r����һ150~C2pa���\��271С�r���Y���������˳�늙C���o��I
[]11 JPLf~~늙C���˽Y����յ͜��µĉ��������ó�늙C��5��������߀�OӋ��һ��10��Pa����՜أ�~J,)v-90��C~0��~C2С�rѭ�h׃��һ�εĭh������늙C�ڴ˭h�����\�У��ڈ���231�Μض�ѭ�h����늙Cԇ�ǰ��ęCе���ԣ�����ԓ��늙C�����ԟo���@׃����
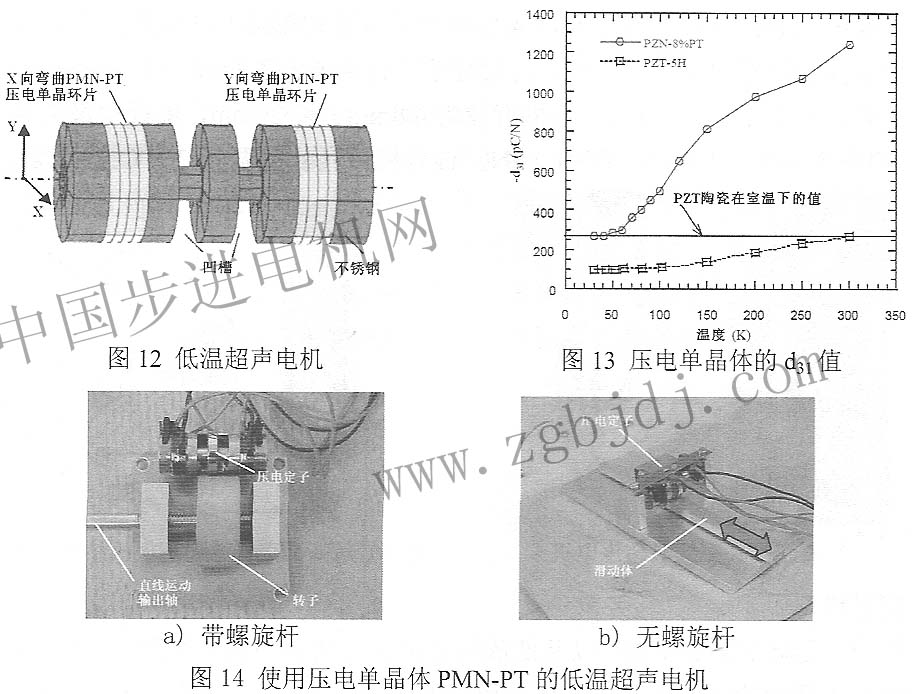
2005�꣬Dong�ȣ����������͵͜؉�늆ξ��wPMN����ɽһ�Ƶ͜س�늙C��Ҋ�D12��0��ԓ늙C����IRS�_�l�Ćξ�����մɣ��������ڣ�30K F�r�����c�Ҝ؉���մ����Ƶĉ�����ԣ���D13��ʾ�������@�N��늆ξ��w����m�ăɷN��늙C�әC(��D14��ʾ)��
���У�أ�����U��ֱ���ͳ�늙C���@�N늙C���д��г̡��߾��ȡ��͜�����������i�����ԡ�
���г�jk f-10mm�����M�ֱ��ʣ�20nnl�������r��jJJ 2ms����늉����ֵ��60�ܣ�Pp�����l�ʣ�41��5kHz���D�٣�30-70r��min���o�����U��ֱ����늙C��77K��Һ���гɹ����\�У����ܷ����Ĺ������D�������½���
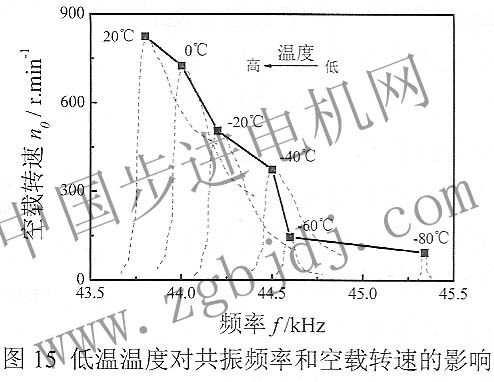
2008 �꣬���������ɽ�|�Ͳ��ĉ���մ�PZT-4����ʹ�õ͜��zճ��늙C������յ͜حh���£��yԇ�˵͜ضȌ���늙C�����l�ʺͿ��d�D�ٵ�Ӱ�(�D15����Ҋ���S���h���ض��½�����늙C�Ĺ����l�����ߣ����d�D���½���
4��4Ħ������
�ڳ�늙C�Y���У��D��Ħ��������Ħ�������á�����ĥ�p��Ӱ푳�늙C��������Ҫ���ء�����l���£�ɽ�������|ϡ���������Ҹ��F��p�������������ۼ���Ħ�������װl��ճ���F���͜حh������ʹĦ������׃��Ӳ�ࡣ��ˣ��dz��BF�m�õ�Ħ������Ҳ�dz�늙C�о��е����c���о��m�÷dz��B��ʹ�õ�Ħ�����ϣ������L��늙C��ʹ�É��������M��늙C�ڷdz��B�h���µđ��á����⣬�_�l�ͷŚ���Ħ�����������ϵȣ������ڳ�늙C�ڹ�W�I���еđ��á�
1998���꣬�ձ��|�����I��W��ʯ��Т���������о��ˎNĦ����������խh���µij�늙C���ԡ�������cFRP��̼����(cM)�͵�����(sic)���մɲ��ϣ��ڳ�����1��10��Pa��1��lO��Pa����µ�늙C�D�ء��D�١�Ħ��ϵ����ĥ�p�����l�F�c���B��ȣ�����Ħ��ϵ������ָ���@һ�F
���ԭ����Ħ���l���ĸ�׃��ĥ�p�͟����Įa��������ʹ�õĎNĦ�������У�cFPR�����Ӱ�С����ĥ�p��Ҳ�^С��200()�꣬Moma�ڡ������о��m�����^��̎���{�׳߶ȵ������ϵ�y��
��sEM��TEM��EB�ȹ���)�鱳������jH�o�Ś��Ժ͟o�Ų����Ƴɵij�늙C��ԇ��о���ģ�B���D�ͳ�늙C��10��Pa��������µĿ��d����(��D16��ʾ)��������ֵ�_��10��Pa�r���mȻ�־����^����_��ԓ늙C���M�����Dݔm���D���S�r�g��u���ͣ�70m��n���D���oֹ������
�@�N�F���ԭ�����ӱ����׃�����D�Ӳ��Ϟ�Ӳ�X�����Ӳ��Ϟ鲻�P������^ܛ������ڳ�
늙C�\���^���У����P䓱�ĥ�p����Ⱦ��Ӳ�X���棬������ճ����2001�꣬�ڽ�����ԇ��У�Morita�ȡ������������D�ӱ���քeͿ�̼���u�����˱���Ϳ��c�����ƥ���ճ�τ����\�Еr�g���^�S24С�r�����D��ֹͣ�r���a���˔��m������ǻ�ȵĚ≺�ܿ�������ֹͣǰ���]�Ю�����ĥ�p��ճ������늙C���D��ݔ�����\�г־��Էքe���J��4��20�������y�ô���c����³�늙Cؓ�d���Ա��^�Y����2006�꣬N��n0�ȡ������F��ģ�B���D�ͳ�늙C��10��Pa������ձ��֭h���е��\�У���������ظ��M�����D�ӽ��|��ĎνY��������Ħ�����ϡ������D�Ӳ��ϣ�ԇ��������~����~���X�Ͻ𡣞�pС�����D�ӽ��|��Ě��w���䣬ʹ�����������ٲ��ϣ�ʹ늙C�\���^���еĚ��w�����pС��10�������F��С������3��10��Pa����늙Cll_���ij��m��ԇ��У�ʹ���˵ͷŚ��ԡ���𤸽�Ե��X�D�ӣ��Y�����\�Љ�����290С�r��ߵ���390С�rf��D17��ʾ)��������r������ՠ�B����֮ǰ����ı��ֳ�����ՠ�B�����L�\�Еr�g�H��80��犡����⣬߀���]���D�ӵĎ����������D�ӱ����_������߶����D�˽��|��ĥм��ȥ��Ч�ʣ��Y��Ҳ���L���\�Еr�g��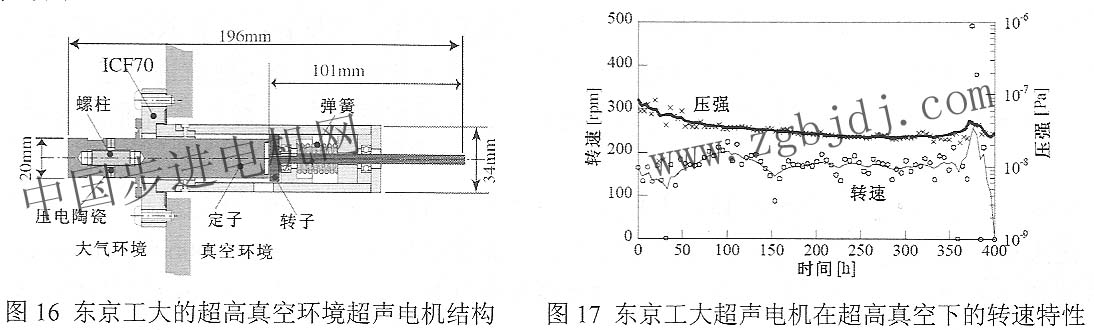
���ς����oĩ��������W�������ڷdz��BF�ij�늙C�о��������ֹ����Щ���M���̡�Ik�����A�Ρ���늙C�ڷdz��B�µĵ��͑��������h�R����W�۽����C�����P���Ӻ;�����е��λ�ȣ��ڱ��������У��Ɍ���֞����ں����I��Ŀ������������ڹ�W�I����{������ϵ�y��
5 1�����������
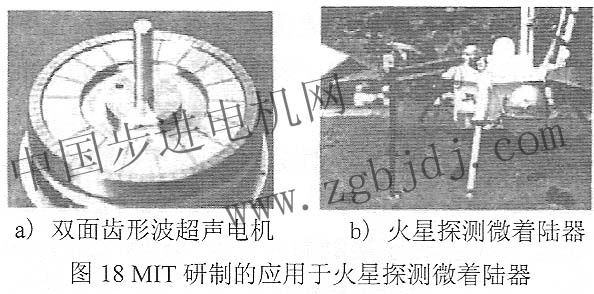
��ʮ�������MIT�cJPL�����_չ��늙C��̫�խh���Б��õ��о������_�l�˾����p���X���в��ͳ�늙C(��D18a)��ʾ)��1996�꣬NAsA�������ڻ���̽�y�����p���Cе�۵�I�ΑB����(��D18b)��ʾ)��NAsA����MIT���Ƶ��p���X�в��ͳ�늙C��ȡ����ˢֱ
��늙C�������c�Ǿo�����o���Xֱ݆���ڴ������¶������ƄӺ��κ͊A�����ش��ӵ��p��Y��
�����늙C�ڐ��ӭh���еğ᷀���Կڡ����c���y�ij���늄әC��ȣ�����ͬ��q�����ϵ���r�p���X����늄әC��ݔ�����ء������ܶȼ����ʶ��ӽ���ɱ���ԓ늙C��Ť��i 1��7N��tn��ʹ��****�ض��_1�ޡ�p����JPL��1996���������ƻ��ǵ͜أ���խh����ϵ�y���_�l��������ܛ����yԇ�ٶȣ��D���c�ضȵĺ����Pϵ��������һ����~N����0��113N m�ij�늙C�������l�F����һ48��r߀�ܱ��������ԣ��������~���ضȞ�һlO�棬�@���Y���������dz��@��f���d�^�� ������늙C�ڵ͜���խh���¿���ʹ�á����1997����LRR-l(Lightweight Survival Rove��r1�ϵ�ȫ�ͺϱ�Micro��X_rm k��N����r�@�N늙C��NASA��JPL X,rԓ��늙C�M���˵͜����ԇԇ��������늙C����
һ150~C)�͜غ����ʶȣ�k��l O��Pa�ĭh���¹�����
1998~--,JtL�^�m�˳�늙C�ں����������еđ����о������о�ɽ���ڵ͜�f��t1 5��x����55��C}�����r�a�����D�صĸ�Ч�p�㳬늙C�����ĉ���Ҫ�����ó�늙C�L7ֶ~i o��EI��N�������̽�y����29���������ó�늙C(����݆_������)�����İlչӋ����Ҫ�����ڵ͜��³�늙C����Փ������������ԣ��Լ�������h����Ӱ푳�늙C�\�Љ����ęC����ء�
��bJPL�������Ŀ�����Ԅ�����ϵ�y(M��ACS)W~��늙C������늙C���Ԅ�����ϵ�y�\�ó�늙C���Fֱ�������D�\�ӣ�ʹ������ϵ�y�w�eС���|���p������Ч���d�|���c�����|����j 10��1 o~f�����Ԅ�����ϵ�yMACS I����������늙C���������Fǰ�M���ˣ� �����F�D
����MAcsII�H�Ãɂ���늙C��һ�����Fǰ�M���ˣ�һ�����F�D����������ϵ�y�dz��o�����p�ɣ�5��2��i)Ŀ���b�á�
Tqew Scale_rech��˾�ĵ͜س�늙C���ԑ����ڼt�⾀��������ԓ늙C���B�m�{��������У�ʹ�z���C�R�^���Ҝؕr�۽������ڜض��½��r���־۽���B����ˣ�2��J(j6��sanguinettl��ª���䑪������һ��273X���ĵ͜ر������У����_�{���x��׃�Σ��Ը�׃���әCе�г������������Ĺ����l�ʣ�ʹ������ǻ�cԭ��aţ����Newr scalelecn��˾߀�����@�N��늙C�������g���������N�����ϵ�еij�늙C����͜س�늙C�����䣯������՟o�ų�늙C���m����յ͜حh����������С�ij�늙C(SE,~I��SXl��5X6)�ȣ�����Ͷ���Ј���
6�Y�Z
Ŀǰ���҇���늙C�ڷdz��B�h���µ��о���̎�ڌ�����о��A�Ρ��о���늙C�ڷdz��B�h���µĸ�����ܣ��������ڳ�늙C�ĽY���OӋ�������dz��B�³�늙C�о����P�I���}�������о��е��y�}���Ķ������M��늙C�����҇����պ����I��đ��úͰlչ��
|











