| ͨ�^ENDAT�ӿګ@ȡ****���a��λ��
���գ�ꐽ�ƽ
(�Ϻ���ͨ��W�Cе�c�������̌WԺ���Ϻ�200240)
ժҪ������DsP��SPI�ӿڌ��F�c���a����ͨ�ţ���ENDAT�ӿڞ锵����ݔ����̖�l���ṩ�˱�����ͨ�^�_�Cǰ�@ȡ****λ��ֵ�������r�xȡ�����}�_�����H�p���˔�늸ɔ_��ʡȥ�_�C�w�㣬���ұ�����ʹ�ô��w�e�a�P��ʹ��Ӌ���xȡλ��ֵ���Ӻ��ף����_��
�P�I�~��****���a����DSP������ͨ��
0�� ��
�ŷ�ϵ�y��Ҫ�y��ϵ�y��λ�ú��ٶȿ������ṩ������̖����ӓQ����̖����늾��a�����о��ȸߡ��T��С�������Ժõă��c���V�������ڔ��ؙC�������D�_���ŷ����ӡ��C���ˡ����_��܊��Ŀ�˜y������Ҫ�z�y�Ƕȵ��b�ú��O���С�
���Dʽ�������a��һ����Ҫͨ�^�w������ҵ��Cеԭ�c������M�й��������ʹ�����о����ԡ�****���a���Ŀ��ɔ_���Ժ͔����Ŀɿ��Դ������ˡ����Ǯ�****���a���������ӣ�����Ҳ���ӣ��a�P�������w�e�ܴ��b���㣬�o����С���ŷ�ϵ�y��ʹ�á����ʽ****���a���ԃ��õ����·���M��λ��Ӌ��������늳����փȲ�Ӌ��ֵ�Ĕ��������H�w�eС�ɣ����ҿ��ɔ_�ԏ���
1 Endat2.2���a���p���ӿ�
���IJ��õľ��a����Endat2��2���a���p���ӿڣ����ɂ�ݔ****���a��λ��ֵҲ�ɂ�ݔ����ʽ���a��λ��ֵ��߀�܂�ݔ����±����ھ��a���е���Ϣ������Ϣ����ֻ��һ���ӿھ����m��������****���a��������ʽ���a������������С��늙C�͜pСϵ�y�ߴ硣cRcѭ�h�����z������˔�����ݔ�Ŀɿ��ԣ�����****���a��λ��ֵ�Ă�ݔʮ�ַ��㡣�����OӋDsP�c****���a����ͨ�^Endat֮�g��ͨ�ţ��@ȡ****λ��ֵ��
2������ݔ
2��1��ʼ�O��
�O��DsP�Ĵ������O�ӿڲ������ƼĴ���(sPIcTL)��ʹDsP̎�����ӷ�ʽ������B�����ӹ�����ʽ�У��������O�ӿڕr���DSP�������O�ӿڮa������sPIcLK���_ݔ����ԓ�r���̖���ھ��a��ͬ��������ݔ������ݔ�����r���r���̖Ĭ�J����ƽ��
2��2���a���x��
���h�ṩ�˶�N****���a����ͣ��aƷ��Ҫ�֞���D�Ͷ��D�Լ����ö����S���ͷ��x�����S������̖��ݔ����ʽ����ENDAT�ͳ��õ�SSI(����ͬ����ݔ)���܉�M�㲻ͬ����2��3�x���ݔ���
���h��****���a����ݔ������ͷ֞�λ��ֵ������Ϣ����������Ҫͨ�^ģʽָ�������x�a��������ݔ��͡��ɂ��r��}�_(2T)��DSP�l��3λģʽָ��o****���a�������x������Ĕ�����͡�ÿλ����������l��(�����ɴ�)��
2��4������ʽ
1)�e�`��Ϣl��2
һ�����a���l�����܌��²����_λ��ֵ�Ĺ��ϕr�����������l���e�`��Ϣ��ͬ�r�e�`ԭ���ھ��a���ϡ��鰲ȫ��Ҋ����횪����a���ڶ����e�`�z�y��Ϣ���e�`��Ϣ2�÷����ƽ�l�͡�
2)λ��ֵ����
λ��ֵ������һ��������������ʽ��ݔ�����L��ȡ�Q�辎�a���ķֱ��ʡ������l�͏�****��Чλ(LsB)�_ʼ(��һ��LsB����
3)������Ϣ
�����l����ͣ������Sλ��ֵ�l��һ�����ɂ�������Ϣ��ÿ�l������Ϣ�L�Ȟ�30bit���Ե��ƽλ�_ʼ��ÿ�l������Ϣ����cRc�Y���������a����֧�ֵĸ�����Ϣ�����ھ��a�������С�������Ϣ������B��Ϣ����ַ�͔�������B�����У�wRNһ��ʾ���a����ij�����Ƿ����_������RMһ�����c��ʾ�Ƿ��ш��Ѕ����c���������BusYһ����Ո�������ڵ��ƽ�r����Ո��l�ͅ�����
2��5������ݔ�^��
���a����ݔ���ڏĵ�һ���r��}�_�½����_ʼ�����a������y��ֵ��Ӌ��λ��ֵ��
�ɂ��r��}�_(2T)��DSP�l��ģʽָ�ģʽָ�������x�a��������ݔ��͡�DsP�l��ģʽָ��o���a�������a���l��λ��ֵ(����������Ϣ)��
���a���ɹ�Ӌ��****λ��ֵ������ʼλ�_ʼ�ɾ��a����DsP��ݔ�������m���e�`λ��һ���e�`1���͡��e�`2���DZO�y���̖�����ڙz�y���ϡ�
Ȼ�a����****��Чλ(LSB)�_ʼ�l��****λ��ֵ�����L��ȡ�Q�c���þ��a�����l��һ��λ��ֵ����Ҫ�ĕr��}�_�������ھ��a�������̅����С�
ѭ�h�����z��l������Ϣ1��2��ÿ������cRc�Y����������Ϣ�����ɴ惦�^�x��Q�����������ɘ������аl������Ϣ��Ȼ��ÿ���ɘ����ڶ��l����Ϣ�x���´惦�^��׃���ݞ�ֹ��
�ڔ����ֽYβ̎����회��r���̖�Þ���ƽ��10��s��30��s���1 25��s��3��75��s���������ص��ƽ��Ȼ�r���̖������һ�Δ����l�͡�
3 DSP�c****ֵ���a�����Д���ͨ���OӋ
3��1Ӳ���·�OӋ
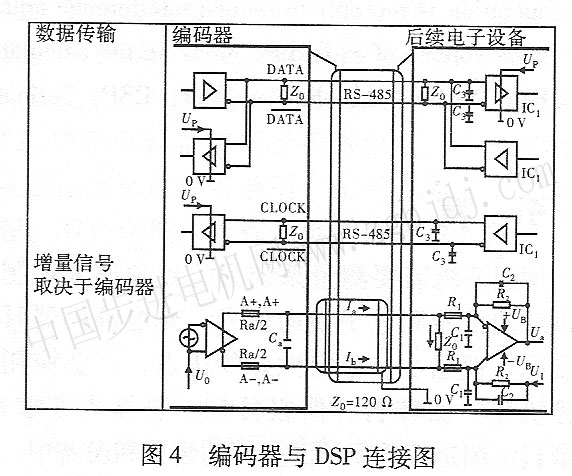
�D1��ʾ��DsP�c****���a��늚��B�ӈD��ͨ�^DsP��sPI���O����ͨӍģ�K������TI��RS485���ò�־�·������sN75146P������SN75AL$19IP���B�Ӿ��a����sPI��һ�����١�ͬ�����С���O�ڣ��������S�L�ȿɾ��̵�λ�Â�ݔ�ٶ�������Ƴ�������ͨ��sPj����DsP̎�������ⲿ���O�Լ�����̎����֮�g��ͨ�š�Rsһ485��һ�N���õĴ��нӿژ˜ʣ�����ƽ�������Ͳ�ֽ������ĽM�ϣ�����ģ�������������������ɔ_�Ժá�
3��2ܛ���OӋ
��ʼ��DSP��sPIģ�K�����а����O��sPI�����Ąӹ�����ʽ���Լ��O��sPI�����ʺ͕r犷�ʽ��
�O�ô������O�ӿ����ÿ��ƼĴ���sPIccR��Ox4c��ʹ����sPIcLK��̖���½�ݔ����������E����ݔ�˔��������o�����l�͕r��sPIcLK���ָ��ƽ�������L���x��13λ��ԓ����ȡ�Q�����þ��a�����O�ô�����ӽӿڲ������ƼĴ���sPIc_rj_��0��6��ʹ�����ӹ���ģʽ��һ��ĕr犷�ʽ��ʹ��TALK���O�ô������O�ӿڲ������O�üĴ���spIBRR���O�÷����飺
sPIBRR=3��127�r��SP�������ʣ�sYscLK��
(SPIBRR+1)��
sPIBRR=(sYscLK��sPI������)һ1
S~BRR=O��l��2�r��
sPI������=SYS(��LK��4��
sPIBRR=0x14�r���r��l�ʞ�200kHz�r����
���ʼs��9600bif��s��
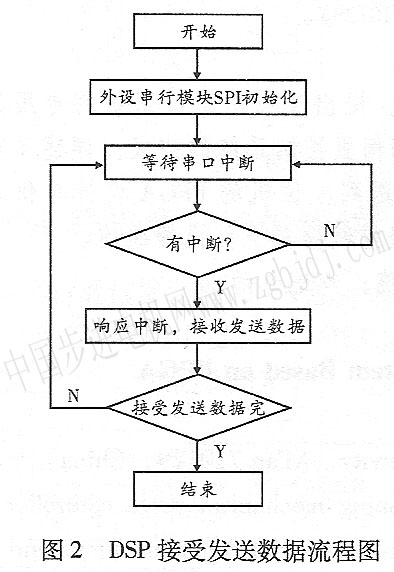
DSP�ӷ�����������D2��ʾ��
3��3���״a�D���M�ƴa
���״a(Gray code)�ֽ�ѭ�h���M�ƴa������M�ƴa�����״a���ڿɿ��Ծ��a����һ�N�e�`��С���ľ��a��ʽ�������p������һ����B����һ����B�r߉�Ļ���(��ͨ���֢�q������a��ѭ�h�a)�����Դ�****���a��ݔ����λ��ֵ���Ǹ��״a����DSP�x����λ�Ô�����ʽ����״a�r����Ҫ�����M���D�Q�鼃���M�ƴa�������M���\��Ͳ��������M�Ƹ��״a�D�Q����Ȼ���M�ƴa���䷨�t�DZ������״a��****λ������Ȼ���M�ƴa��****λ�����θ�λ��Ȼ���M�ƴa���λ��Ȼ���M�ƴa�c�θ�λ���״a�ஐ����Ȼ���M�ƴa�������λ�c�θ�λ��Ȼ���M�ƴa��������ơ����״a�D���M�ƴa(��a)������߅�ڶ�λ�𣬌�ÿλ�c��߅һλ��a���ֵ��������ԓλ��a���ֵ(����߅һλ��Ȼ��׃)��
4С�Y
��������TMS320LF240x DSF����sPI�ӿڌ��F�c���h****��늾��a��֮�g��Endat2��2�ӿ�ͨ�š���ϵ�y��Ӳ���OӋ��δ���ð��F�Č��ý�aоƬ��Ҳ�]�в����~���cPLD(FPGA)��̎�����a���������H����D��P����ɾ��a�������Ľ��գ����Դ��ϵ�y�OӋ�����ͮaƷ�ɱ�������ܛ���ķ�ʽ̎�����a��������CR(���z�����˂�ݔ�ɿ��ԣ������ɝM��ϵ�y�@ȡλ����Ϣ����Ҫ��߀�����`��،�ͨ���e�`�M���\���̎����
|