���Ž����ŷ����g(sh��)�����M(j��n)չ���m(x��)3��
�T���ɣ�������늙C(j��)�о���
��ժ Ҫ�����Ğ顰���Ž����ŷ����g(sh��)�����M(j��n)չ����Ҋ(ji��n)1990�꡶늙C(j��)����4�ڣ����m(x��)ƪ����B�ŷ��(q��)��(d��ng)���ĽM�ɺ���ԭ���������ŷ��(q��)��(d��ng)���cֱ���ŷ��(q��)��(d��ng)������Ҫ��e����ֱ���ŷ�늄�(d��ng)�C(j��)��ͬ���ͽ����ŷ�늄�(d��ng)�C(j��)�ͮ��������ŷ�늄�(d��ng)�C(j��)���(l��i)늙C(j��)�������c(di��n)�ı��^��
�����}�~���ŷ��Ŵ���������ԭ��������늄�(d��ng)�C(j��)���ŷ�늄�(d��ng)�C(j��)��ͬ��늙C(j��)������늙C(j��)��ֱ��늙C(j��)������
5�ŷ��(q��)��(d��ng)���Ļ����Y(ji��)��(g��u)����ԭ��
���͵Ľ����ŷ��(q��)��(d��ng)���ͽ�(j��ng)���ֱ���ŷ��(q��)��(d��ng)�����ƣ�Ҳ�ǰ�������h(hu��n)���ٶȭh(hu��n)���]�h(hu��n)����ϵ�y(t��ng)����ˣ������ŷ��(q��)��(d��ng)��Ҳ�Q(ch��ng)���ٶȿ��Ɔ�Ԫ����Q(ch��ng)���ŷ��Ŵ����ȡ��D5.1��5.3��5.5�քe��ֱ���ŷ������Ҳ��(q��)��(d��ng)�;��β��(q��)��(d��ng)�Ľ����ŷ��(q��)��(d��ng)����ԭ������D���ĈD�п�Ҋ(ji��n)���ɷN�����ŷ��(q��)��(d��ng)����ֱ���ŷ��(q��)��(d��ng)���Ļ����Y(ji��)��(g��u)�����Ƶġ������Ă������Ы@���ٶ���Ϣ����(j��ng)һ�����·׃�Q�γ��ٶȷ���늉������c�o��ָ���ٶ�늉���̖(h��o)���^�����`����̖(h��o)���ٶ��{(di��o)��(ji��)���M(j��n)�зŴ��У����ͨ����Pl�{(di��o)��(ji��)�����o������������أ���ָ����̖(h��o)��������h(hu��n)��ݔ��ָ�������h(hu��n)�У�������������õ������������̖(h��o)�cָ����̖(h��o)�M(j��n)�б��^���`�(j��ng)����{(di��o)��(ji��)���Ŵ�У�����ͽo�}���{(di��o)�Ɔ�Ԫ���Ҋ(ji��n)��PPVM�������Dz��l(f��)������늉����^����(g��u)�ɡ����{(di��o)�Ƶ��}����̖(h��o)���ƻ��O�(q��)��(d��ng)�·�������(q��)��(d��ng)��׃��(sh��)�F(xi��n)��(du��)늙C(j��)�@�M��������ơ��@���Ҋ(ji��n)���������PWM��
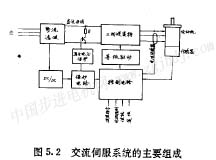
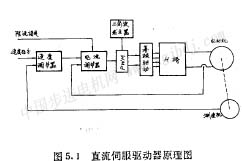 �ɈD5.2�ŷ��(q��)��(d��ng)��߀�������ׂ�(g��)���ֽM�ɡ����ȣ��(q��)��(d��ng)���ĸ�늉�������ֱ��ĸ����(l��i)�Դ���ֱ���Դ��ͨ���������ཻ��늉�ݔ�룬��(j��ng)��ʽ�����V����@�á�ϵ�y(t��ng)�Еr(sh��)Ҳ���Æ���ݔ�롣��(d��ng)ϵ�y(t��ng)�Ƅ�(d��ng)�r(sh��)��늙C(j��)��(d��ng)�ܵĻ������ڞV��������ϳ��ʹֱ��ĸ��늉�Ѹ��������Σ����׃��Ĵ����_(k��i)�P(gu��n)�ܺ͞V�����������������늉����o(h��)���������m�r(sh��)��ͨһ������_(k��i)�P(gu��n)�������늺ɽ�(j��ng)늽MR�̕r(sh��)ጷ�һ���֣�ʹֱ��ĸ��늉��֏�(f��)������ֵ�����������ϵ�y(t��ng)�\(y��n)�пɿ��ԣ�ᘌ�(du��)�ɽ���F(xi��n)�ĸ��N������r���ϣ��O(sh��)���˱��o(h��)�͈�(b��o)���·�����猦(du��)�^(gu��)늉���Ƿ늉����^(gu��)������^(gu��)�d���^(gu��)�١��^(gu��)��ȵı��o(h��)������߀�ж̕r(sh��)�^(gu��)�����Ƶȸ����·��
�����ŷ��(q��)��(d��ng)���cֱ���ŷ��(q��)��(d��ng)���ڽY(ji��)��(g��u)�ϵ���Ҫ��e������������h(hu��n)��
5��1 ���Ҳ��ŷ��(q��)��(d��ng)��������h(hu��n)
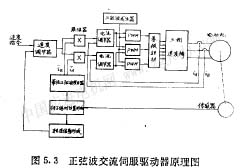
�����(q��)��(d��ng)��ʽ�Ľ����ŷ��(q��)��(d��ng)��ԭ��Dʾ�ڈD5.3�С��@�����h(hu��n)��������Ҫ�ǿ���늄�(d��ng)�C(j��)�����@�M����M������Ҫ��
a����(y��n)���������(du��)�Q(ch��ng)���Һ���(sh��)׃���P(gu��n)ϵ��
b����������λ�քe�cԓ��ķ�늄�(sh��)��λͬ�ࣨ���ࣩ��
c���������ֵ�c�ٶ��{(di��o)��(ji��)��ݔ�������ָ����̖(h��o)����������
���ø߷ֱ��ʵ��D(zhu��n)��λ�Â������a(ch��n)�����D(zhu��n)��****λ����Ϣ���چ�λ�����������Юa(ch��n)�����������Ҳ���̖(h��o)�������ķ�ֵ��һ��λ������λ�c�D(zhu��n)���D(zhu��n)��0���P(gu��n)��  ��λ���Ҳ���̖(h��o)�İl(f��)�������S�ͬ����������������һ��(g��)���ӣ��D(zhu��n)��****λ����̖(h��o)��һ��(sh��)������̖(h��o)�����M(j��n)�ƴa�����ڃɂ�(g��)���Һ���ֻ�x�惦(ch��)��(ROM)�зքe�x��������λ���Ҳ��Ĕ�(sh��)��������(j��ng)�ɂ�(g��)Dl4�D(zhu��n)�Q����ɵ�ģ�M��ݔ����������λ���Ҳ���̖(h��o)�ڃɂ�(g��)�˷������c���ָ����̖(h��o)�M(j��n)�г˷��\(y��n)�㣬�õ��������ָ����̖(h��o)����(sh��)�H�ϣ����Î��˷����ܵ�Dl4�D(zhu��n)�Q������ROM��ݔ����ֱ���@���硯���硯��̖(h��o)���@�ɂ�(g��)��̖(h��o)�քe�ڃɂ�(g��)��ͬ������{(di��o)��(ji��)�����c�������������̖(h��o)�M(j��n)�б��^����(j��ng)�����PPVM�h(hu��n)��(ji��)������׃�����@�����늙C(j��)�����@�M���֮�͞����ԭ�������Եõ�������PWM��̖(h��o)��
5.2���β��ŷ��(q��)��(d��ng)��������h(hu��n)
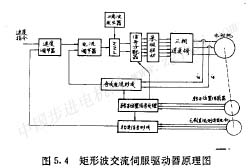
���β��(q��)��(d��ng)�Ľ����ŷ��(q��)��(d��ng)��ԭ��Dʾ�ڈD5.4����D��ʾ�����D(zhu��n)��λ�Â�������̖(h��o)̎���õ��D(zhu��n)��ÿ�D(zhu��n)3604늽Ƕȵ����ڃ�(n��i)�^(q��)�ֳ�����(g��)��B(t��i)��λ����̖(h��o)�����@��̖(h��o)�͌�(du��)���@�M����ɘ���̖(h��o)�C���γ�һ��(g��)�c늙C(j��)늴��D(zhu��n)��˲�B(t��i)ֵ�ɹ��ȵĺϳ������̖(h��o)����(sh��)�H�ϲ�����������z�y(c��)��ֻ�z�y(c��)�������࣮���ɵõ������������̖(h��o)����ֱ���ŷ��(q��)��(d��ng)�����ƣ�ֻ��Ҫһ��(g��)����{(di��o)��(ji��)�����M(j��n)��ָ�������̖(h��o)�ͺϳ������̖(h��o)�ı��^���Ŵ��У����Ȼ����̖(h��o)�M(j��n)����̖(h��o)�����·�����D(zhu��n)��λ�Â�������̖(h��o)���ơ���PHrM��̖(h��o)���䵽����(g��)���O�(q��)��(d��ng)�·ȥ��ʹ�����@�M���m��(d��ng)�r(sh��)�g�M(j��n)�댧(d��o)ͨ��������������������������ƣ����ֵ�cָ�������̖(h��o)�����ȡ�
5.3�����Ҳ��(q��)��(d��ng)������£���ͬ�����ڡ���λ���Ҳ��l(f��)�������a(ch��n)�����dž�λ��ֵ�ľ��β������̖(h��o)�����(l��i)���ڣ����˷������IJ��ֽ������ָ��ķ�ֵ�{(di��o)�ƣ��γ��������ָ�������̖(h��o)������߀����Ҫ�ɂ�(g��)����{(di��o)��(ji��)��������(g��)PWM�h(hu��n)��(ji��)��
�@Ȼǰһ�N�����·�Y(ji��)��(g��u)���^��(ji��n)�Σ��ɱ��^�ͣ����õ��^�ࡣ
혱�ָ������Щ�S�̵��ŷ��(q��)��(d��ng)���a(ch��n)Ʒ߀����λ�íh(hu��n)���֣��e�nj�(du��)�ڲ���̎�����Ĕ�(sh��)�����ŷ�������������λ�íh(hu��n)�ڃ�(n��i)�DZ��^����(sh��)�F(xi��n)�ġ��@����ʹ�Ñ��ڑ�(y��ng)�Õr(sh��)���ӷ��㣬��?y��n)����?sh��)�Ñ�������λ���ŷ������õġ��r�ң�߀���ɹ�����ʽ���ƣ����Ԍ�(sh��)�F(xi��n)λ�ÿ��ơ����ؿ��Ƶ��x��
6���(l��i)��ֱ���ŷ�늄�(d��ng)�C(j��)�ı��^
����ͬ�������ŷ�늄�(d��ng)�C(j��)�cֱ���ŷ�늄�(d��ng)�C(j��)��߳����ͻ����(y��u)�c(di��n)��
���߿ɿ��ԡ��������׃��ȡ����ֱ��늙C(j��)�Q�������ˢ�ęC(j��)е�Q����������Ҫ���S�ЛQ����
���;S�o(h��)���B(y��ng)Ҫ��ֱ��늙C(j��)��횶��������ˢ�����Q�ˢ�ʹ�ӡ�Q������
��늙C(j��)��Ҫ�p�����ڶ����@�M���F���ϣ�ɢ�����ף��ұ����ڶ��Ӳۃ�(n��i)���şᱣ�o(h��)����Ԫ������ֱ���ŷ�늙C(j��)�p����Ҫ���D(zhu��n)��늘��ϣ�ɢ�����y�����֟�����(j��ng)�S���oؓ(f��)�d����C(j��)���Ľz�ܣ�����(du��)ؓ(f��)�d�a(ch��n)������Ӱ푣�
���D(zhu��n)���D(zhu��n)��(d��ng)�T��С�����ϵ�y(t��ng)�����ԣ�
���D(zhu��n)�ӽY(ji��)��(g��u)���S���ٹ�����
����ͬ�����½����ŷ�늙C(j��)���^С�������w�e��
���ŷ�ϵ�y(t��ng)�ɹ����ڟo(w��)�Դ׃������ʽ��������늉������������ɡ���ֱ���ŷ�늙C(j��)����Q����Ƭ�g늉����ƣ����˹������^��늉���
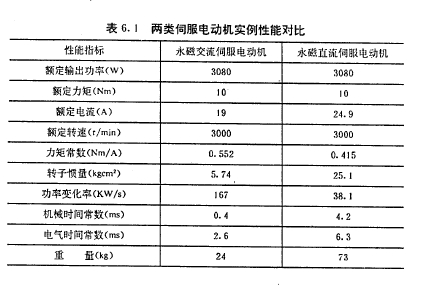
�ڱ�6.1�нo���ɷN늙C(j��)���ͮa(ch��n)Ʒ��ͬһ��˾���a(ch��n)�����܌�(du��)�ȣ���Ҋ(ji��n)���Ž����ŷ�늄�(d��ng)�C(j��)�����@�ă�(y��u)��(sh��)��
��ˣ��M�����Ž����ŷ�늙C(j��)�����λ�Â��������ŷ��(q��)��(d��ng)���^���(f��)�s��ʹ��ɱ��Ըߣ�����������ͻ����(y��u)�c(di��n)���ѫ@��Խ��(l��i)Խ��đ�(y��ng)�ã��ɞ����?li��n)Q���a(ch��n)Ʒ�DZ�Ȼ�ġ�
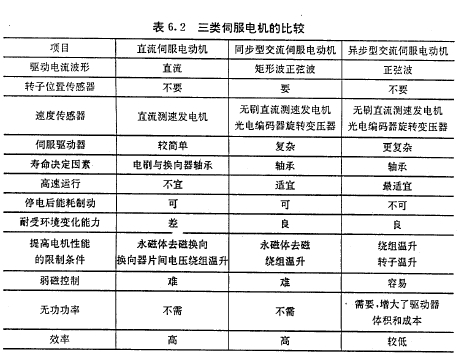
�ڱ�6.2�o����ֱ������늙C(j��)��ͬ�������Ž����ŷ�늄�(d��ng)�C(j��)�ͮ��ͽ����ŷ�늄�(d��ng)�C(j��)�����c(di��n)�ͱ��^��
�����ͽ����ŷ�늙C(j��)��ݔ��\ʽ�D(zhu��n)�ӣ��Y(ji��)��(g��u)��(ji��n)�Ρ��ɱ��^�͡���(ji��n)�̡����ܸ����x������(qi��ng)���^(gu��)�d������(qi��ng)����ͬ����׃���ŷ�늙C(j��)����ϡ�����ŕr(sh��)���ɱ��^�ߡ������x�������^(gu��)�d�������d�������ŷ��(q��)��(d��ng)�������(l��i)�f(shu��)��ͬ���ͽ����ŷ��Ȯ����Ϳ��Ʒ�����(ji��n)�Σ����(q��)��(d��ng)��׃�����؞�늙C(j��)�ṩ�o(w��)�����ʣ���ͬ��ݔ���C(j��)е������r�£����^С���w�e���^�͵ijɱ���
�@����?y��n)鮐���ͽ����ŷ�늄?d��ng)�C(j��)ݔ�������ݔ�����ر��|(zh��)���ǷǾ��Եģ�Ŀǰ���õĴň�(ch��ng)������Ƽ��g(sh��)����ʸ�����ƣ�������ֽ��ň�(ch��ng)�����������������������������^������Ʒ�ʽ�քe����늙C(j��)�ň�(ch��ng)�����ء��o(w��)Փ��ֱ�Ӝy(c��)����ͨ���g��Ӌ(j��)�㶼���^��(f��)�s����Ҫ�����ٵ�̎����������늙C(j��)�D(zhu��n)�Ӱl(f��)�ᣬ�ض�׃������ϵ�y(t��ng)����(sh��)�ĸ�׃�������˿��Ƶ��y�ȡ������������ɱ��^�ߡ�����һ���棬�����ͽ����ŷ�늄�(d��ng)�C(j��)���ſ��ƣ�ʹ늙C(j��)�ܺ㹦���\(y��n)�ДU(ku��)���D(zhu��n)��׃��������
Ŀǰ��ͬ���ͽ����ŷ�늙C(j��)������λ���ŷ�ϵ�y(t��ng)���电(sh��)�ؙC(j��)�����M(j��n)�oϵ�y(t��ng)���C(j��)�����P(gu��n)��(ji��)�ŷ����Ƽ������C(j��)е�b���\(y��n)��(d��ng)���ƣ������c(di��n)λ���ƺ��B�m(x��)܉�E���ơ���Ҋ(ji��n)�Ĺ��ʷ���
늙C(j��)�Ա��o(h��)���Ƈ�
���ô�Klockner - Mocller����˾���Ƴɹ���PK22--sp�M��늙C(j��)������������(d��ng)�����Ͷ���Ј�(ch��ng)���������Ա��o(h��)�������������M(j��n)�ı����b�ã��ڹ��ϗl�����ܜp��ϵ�y(t��ng)��ͣ�C(j��)�r(sh��)�g��
��(sh��)���ٶȿ�����
�A(y��)Ӌ(j��)�@�N���b�������õđ�(y��ng)��ǰ�����瑪(y��ng)����Ͷ�ϱã��������͙C(j��)�Լ��Ԅ�(d��ng)�����a(ch��n)�������b�ã����b�C(j��)�Լ���Ҫ���_���Ƶ������\(y��n)��(d��ng)���ƵĈ�(ch��ng)�ϡ�
ԓ��������ͨ�^(gu��)�����ٶ���̖(h��o)����(sh��)�F(xi��n)�ģ�������̖(h��o)���b��늙C(j��)���Ĕ�(sh��)�֜y(c��)�كx�ṩ������ԓ��̖(h��o)ݔ�o�ɾ��̿�������
�c����������ʹ�õ�늙C(j��)��һ�N�������\�D(zhu��n)���������(d��ng)���\(y��n)��늄�(d��ng)�C(j��)��ͨ�^(gu��)�����D(zhu��n)�Q�_(k��i)�P(gu��n)��ԓ늄�(d��ng)�C(j��)�܉���ȫ���\(y��n)����r�·��D(zhu��n)��������ֱ�ӎ���T��ؓ(f��)�d�����@�r(sh��)����ȫ���·��D(zhu��n)��������c�X݆׃����(li��n)�ӣ�����(d��ng)�D(zhu��n)�س��^(gu��)�Mؓ(f��)���D(zhu��n)�أ���ֵ�D(zhu��n)�����~���D(zhu��n)���ǔ�(sh��)ʮ�ߵ���(sh��)ǧ�ߣ���(g��)�e����(sh��)ʮǧ�ߡ��������ͽ����ŷ�늙C(j��)��Ҫ�������Ժ㹦�ʔU(ku��)չ�{(di��o)�ٷ����Ĵ����{(di��o)��ϵ�y(t��ng)�С��ڔ�(sh��)�ؙC(j��)������Ҫ�����Sϵ�y(t��ng)�(q��)��(d��ng)����Ҋ(ji��n)���ʷ����ǔ�(sh��)ǧ�����ϡ��������õļ������ܣ�����늙C(j��)�@�M��Ƕ�к��Ԫ������(d��ng)���Դ�Ϳ�����֮�g�Ľ��|����Ȧ��ͨ�r(sh��)�����ṩ�^(gu��)�d���o(h��)��
���w늄�(d��ng)�C(j��)���o(h��)��
CEFIȫ���늄�(d��ng)�C(j��)���o(h��)����������(gu��)��˾�_(k��i)�l(f��)�ģ������ù��w����·���ɞ��̈́�(d��ng)�C(j��)�ṩ****�^(gu��)�d���o(h��)��400A�������БT�����{(di��o)�����Լ�����ָʾ��
�\(y��n)�Еr(sh��)��CEFI���ù��w���g(sh��)��ӵ�ģ�M늙C(j��)�ğ��γɣ����������������p���ٟ��^(gu��)�d��(sh��)�Hֵģ�M���γɡ���(d��ng)늙C(j��)���һ�_(d��)���~��ֵ���t������������c(di��n)���r(sh��)�g��CEFI������ͨ�^(gu��)һ��(g��)����׃��������늙C(j��)����������Õr(sh��)�g�����Ԫ���ĽY(ji��)�ϣ��ṩ�δ_��늙C(j��)���γ�ģ�M������(d��ng)�_(d��)�������S�ĕr(sh��)�g����������w����·���P(gu��n)��늙C(j��)��
ԓ��Ԫ�Ў���ع��^(gu��)�{���o(h��)�ģ����ҿ��Ɯضȷ�����0. 5��100A��
�����m(x��)��
|