�ŷ�늄әC�C늕r�g�������C�yԇ
�����A ���K�A�������I�C늌��ƌWУ��
O�� ��
�r�g�����Ǻ����ŷ�늄әC���ل�������Ҫ�ӑB����ָ�ˡ��r�g������ͨ�^Ӌ��ķ�����ã�����Ӱ푕r�g���������غܶ࣬ʹ��Ӌ����Ĕ�ֵ��һ������ֵ��߀��Ҫ�Ì��H�y���ķ������õ����H�ĕr�g������
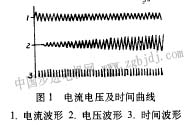
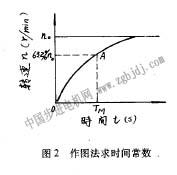
�ŷ�늙C�C늕r�g�����Ķ��x�ǣ�늙C���d����늙C�����@�M���~������늉����ļӵ�늘��@�M��һ���A�S�~������늉���̖����늙C�D�ӵ��D���_��������d�D�ٵİٷ�֮63.2����Ҫ�ĕr�g�����H��������d�D���ǟo���y���ģ�����ͬ�ӗl���µČ��H���d�D�ف�����������d�D�١��C늕r�g����һЩ���͜yԇ����������Ϳɷ֞�ֱ�Ӻ��g�ӃɷN����������늄әC�l늙C�����ù��ʾ������ֱ���ŷ�늙C�������늉����r�g��������������Dl��ʾ��Ȼ�����D�g������r�g��������D2��ʾ���@�N�������^���Σ������D�ľ��ȟo�����C���`����^���܆�Ƭ��Ӌ��C�Y�����M�ļ�����м��g���Ϳɱ��^���_�Ĝy���ŷ�늙C�ęC늕r�g���������ҿ��^�õĽ�Q�y��Ԫ���D�ӑT���c��̖ϵ��֮�g��ì�ܡ�
lϵ�yԭ����D
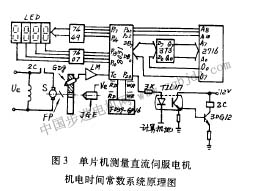
�Æ�Ƭ��Ӌ��C�y��ֱ���ŷ�늙C�C늕r�g����ϵ�yԭ��D��D3��ʾ���D�У���Ƭ��Ӌ��C����MCS-51ϵ��8031�ͣ���ӳ�����A��EPROM2716���@ʾ����4λ��ꎘOLED�@ʾ�Y����FD39-GP16���ʹ�ӡ�C��ԓ�ʹ�ӡ�C�����c�ɺͶ�N̎�����B�ӣ�ʹ�Æ�һ��+5V�Դ���������C֮�g����Ϣ���Ϳɲ��ò�ԃ��ʽ���Дʽ��
TIL117������������Á�����ֱ�����|��2c������ጷţ�ͬ�r��ֹ�����ɔ_��̖�Z���Ƭ�Cϵ�y��TIL117ݔ��˽ӵ��c�͆�Ƭ�Cϵ�y�ӵ��c�B��һ��
ǰ�ö��ٶșz�y�����ɼ���ԴJGE����늹�GDg������PFP��֧�ЈA�P�M�ɡ�36����늹ܾ���ķֲ���֧�ЈA�P�Ϙ��ɹ�늱P���t늙Cÿ�Dһ�D����늱Pݔ��36���}�_������P��45�Ƚ��N�b��늙C�S��ˣ��䘋�����p�|���Ϙ��ɣ��t����P���D�ӑT����ȫ���Ժ��ԡ�
2ϵ�yԭ��
���ŷ�늙C�^���^����Փ��֪��늙C���D����һ�����A�ַ���
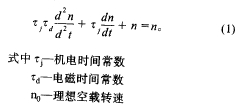
�ڴ������r�£��e���зŴ��������c늘��@�M�മ�r���ɺ��Բ�Ӌ������ʽ(1)�ɺ�����һ�A�ַ��̡�
���һ�����H�Ķ��A�T�ԭh��������һ�A�T�ԭh���� ��ʽ(3)�M�зe�ֿɵ�
��t=3�r��늙C���D�٣��ͽӽ����d�D�٣����ʽ(4)���Ժ�����
늙C�D�ٺ��}�_�����Pϵ
���������P��ʽ�����ӳ�������Ƭ�C�ȣ��ɷ�����M�����PӋ�㡣
��Ƭ�C�y��ϵ�y�ڜy���r�g����TM�r�������Ɇ�Ƭ�C�Ŀ�P20��ݔ��һ���_�P����ͨ�^��������T//117ʹֱ�����|��ZC��Ȧͨ늣����|��ZC���ϣ�����ֱ���ŷ�늙CS���ஔ����늙C늘��@�M�ϣ���һ�~���A�S������̖��ǰ�ö˼����ٶȂ��в���ݔ�������D�ٵ��}�_��̖��ԓ��̖��LF324�Ŵ��ֱ���M���Ƭ�C8031��Ӌ����To�M��Ӌ��������Ӌ�����Q����������D��ֵ��LED�@ʾ������ֱ���ŷ�늙C��ͬ�r����Ƭ�C�Ȳ�Ӌ�r���_ʼӋ�r�g��һֱ��To�ڜy��늙C�D�ٵ����d�D�ٞ�ֹ��ϵ�y�M���Д��B�����Д����һ�������ZCֹͣ늙C����һ�����M�Д�ֵ̎���������M�ϣ����ѕr�g����TM��LED�@ʾ��ͬ�r��ӡ�C��ӡ����ֵ��������
3ϵ�yܛ��
�}�_�M��Ӌ��������Ӌ�����Q����D��ֵ���D��ֵһ�����͵�LED�@ʾ����һ�����͵��������A�^���A���Ա㔵����ӡ�͜yԇϵ�y��ܛ����Ҫ���������z�y�����Д���ճ����N�\������@ʾ�����M�ϡ����D�ٵ��_���d�D�ٕr��Ӌ�r��ֹͣӋ�r��ϵ�y�M���Д��B���z�y��������ʹ�ӡ��������
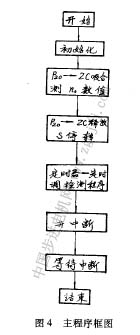
�������M�г�ʼ���Ϳ��d�D��no�Ĝyȡ������noֵ��һ��Ԫ���A�Ԃ��Д���^�����á����d�D�ٜy����������Ҫͨ�^TIL117���ƽ��|��ZCʹ늙Cͣ�D�������Õr�g����TM�Ĝʂ䡣���������һ��ܛ�����r����ԓ�����Ŀ���ǿ��Ɯy��no�Ժ�ͣ�C���_ʼ�yȡTM������늙C֮�g�ĕr�g��ԓ�r�u�ɸ�����Ҫ�����O�����������D��D4��ʾ��
�z�y���yȡrM�r�������əz�y����l��ָ�ͨ�^TIL117ʹ���|��ZC���ϣ�����ֱ���ŷ�늙CS��ͬ�r�Ȳ�Ӌ�r���_ʼӋ�r��To���_ʼ�������ٶȂ������l
�Д���ճ����Д����������ͨ�^TlL117����ֱ�����|��ZCጷţ�ʹ늙Cͣ�D��Ȼ���{�Ô���̎�������M�Д��������������M�ϣ����ѵõ��ĕr�g����TM�͵�LED�@ʾ����ӡ�C��ӡ�������ͺ���������
4�Y�Z
�Æ�Ƭ��Ӌ��C�M�ɵ�ֱ���ŷ�늙C�C늕r�g��������yԇϵ�y����Y�����^���Σ�����ϵ�y�ijɱ����^�ͣ��yԇ�ַ��㡣����ϵ�y�Ĝyԇ������Ҫȡ�Q��ǰ�ö��D�������dz��ӽ����H��r��
����ǰ�ö��D�ٵĜy�����õ��Ǽ���Դ����늹܂��м��g��늙C�D��ÿ�D��ݔ��36������}�_����ˣ��D�ٵęz�y�DZ��^���_�ġ�
�����īI
1늙C������ɺ��������늙C��23ƪ�����Cе���I�����磬1977
2����늙C��������ͨ��W���������I������
3ꐂ��ˣ���Ƭ��Ӌ��Cԭ�����䑪�ã����A��W�����磬1988