ͬ��늄әC�C�ԄӜyԇ�b��
���c�� �� �� �� �P(�����I���I��W)
1 �� ��
늙C�yԇ���g�İlչ���S���ƌW���g�Լ�늙C���I�İlչ���lչ�����ġ�����늙C���C�yԇ���g�t�nj������������ֻ��x��(�x��)����Ӌ��C���õ�늙C�yԇϵ�y�ж��γɵ�һ�T�¼��g[1]�����Ľ�B�ĵ���ͬ��늄әC�yԇϵ�y��һ����80C552����ĵĆ�Ƭ�C�ԄӜyԇϵ�y��
2�yԇԭ��
���ˌ��F�ԄӜy�����y늙C�ڲ�ͬؓ�d�µ��\����r���x����һ�_�܆�Ƭ�C���Ƶ�ֱ������늙C���鱻�y늙C��ؓ�d����ԓ����늙C���D��(ͨ�^������������F)��С�����˿��Ʊ��y늙Cؓ�d��С��Ŀ�ġ�ͨ�^�y�����y늙C��늉�������Լ��D�ؾͿ����_����늙C�������\�����ܵĜyԇ��
2.l늉�����Ĝy��
����늉����������ЧֵӋ�㹫ʽ��[2]��
ʽ��U��Iһһ늉����������Чֵ
u(t)��i(t)����늉������˲�rֵ
T����늉�������Ľ�׃����
����چ�Ƭ�C���F���ֻ��y�����\���xɢ���������e��ʽ(1)��(2)�飺
ʽ�С�T�����ɘ�����
nһ�ɘ��c��
һ����õ��g���ɘӣ��t�У�
�����A��D�D�Q��늉��������̖��횽�ǰ����̖̎���·(�羫�܃x�û�������****ֵ�·��)�M��׃�Q��׃��O��5V��늉���̖���@�Ӝy�õĽY��߀���քe����늉�������D�Qϵ��Kv��Ki(���ʄt�����Թ����D�Qϵ��Kp)���D�Qϵ����ָ��ijһ���y����ģ�Mݔ��ͨ���M��ǰ��̎����A��D�D�Q��ÿһcPu�������������Č��H��ֵ�����ڻ�������****ֵ�·���ɾ����·Ԫ���M�ɣ����Ԍ��ڽ���ֱ������ԓ�D�Qϵ����ͬ��
��Փ��ÿ���ڲɘ��c��Խ�ྫ��Խ�ߣ����H�ϣ�����10λA��Dÿ���ڲɘ�70��100�c���ˡ��@������A��D�D�Q���D�Qģ�M���r���������`����o��ͨ�^���Ӳɘ��c���������S���ɘ��c�����ӣ��M��Ӌ����۷e�`��Ҳ����
2��2����ݔ�˹��ʵĜy��
�xɢ����Č��H��ʽ�飺
ʽ��Kp���������D�Qϵ��
����늉��������̖��׃��o��5V����̖(�ٶ������ؓ�d����늉���ǰ�����)�Լ���δ��****ֵ׃�Q�IJ��Σ������״_������ؓ���ʅ^�g����Dl��ʾ���քe�ۼ���ؓ���ʅ^�g��Ȼ������������ʡ�
�麆��Ӳ���·��δ����ͬ���ɘӷ����������Ü�ͬ���ɘ��k��[3](ԓ�����S������r���_ʼ�ɘ�)��ͨ�^�����^���c���ҵ���̖���ڵ���ֹ��Ҳ�ɴ_��ÿ���ڲɘ��c�������c��ֵ���M��l����
a���^���������cֵС��
b������С�ڻ����a��
ʽ��Vref(+)����A��D�D�Q�Ļ���늉�
r����A��D�D�Q���ķֱ���
2��3�D�ؼ�****ͬ���D�صĜy��
���y늙C�c����ؓ�d��ֱ������늙C�����B�ӣ�ͨ�^�y������늙C��ݔ���D�أ�������ñ��y늙C���D�ء���ֱ������늙C���D���c늘������һһ�����Pϵ���@��ͨ�^�y�^�לy��������ܵõ��^�y�y���D�ء�ͨ�^��u��������늙C���ֱ�����y늙C�R��ʧ�����˕r�̵��D�ؼ���****ͬ���D�ء�
���H�ı��y늙C���D��ֵ߀����������늙C������ͬ���\�Еr�����е�Ħ��������M��M�Ĵ_��������ʹֱ������늙C���d�\�У��{����늉�ʹ���D�ٵ���ͬ���\�Еr���D�٣��yȡ�˕r��늘�����������ќyȡ��ֱ������늙C���D���c����Pϵ����M��I�_��Ħ��������Mr���t���y늙C�Č��H�D�؞飺
ʽ��Mc��������늙Cݔ���D��ֵ
�˕r���y�Ĕ���������ֱ������늙C�����ز��ӵ�Ӱ푣����ԑ��x�����ز���С��늙C��
2��4���������Ĝyȡ
ݔ�����ʡ�Ч�ʡ��������Ը���ǰ�����y�_����
ʽ�Ц�����ͬ���D��
P2����ݔ������
cos�չ�����
P��u��I�����քe���ќy����ݔ�빦�ʡ�늉������
3ϵ�yӲ��
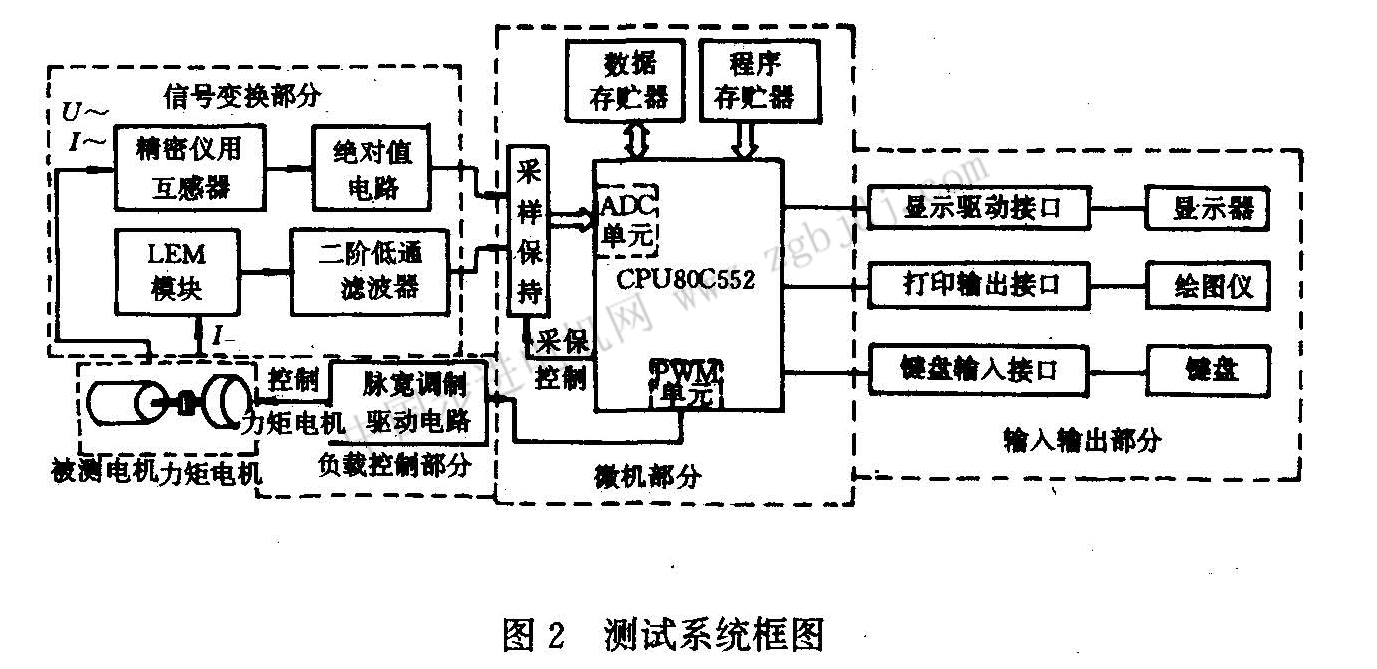
�D2��yԇϵ�y��D��ԓϵ�y��Ҫ���C��̖׃�Q��ؓ�d��B���ơ�ݔ��ݔ���IJ��ֽM�ɡ�
3��1�C
��Ƭ�C����������ԄӜyԇ�ĺ���Ӳ
����������CP[J80C552����Ҫ�ij�����A�����������A���Uչ�·���ɘӱ����·�Ͳɘӿ����·�ȡ����ڲ������w����80C51ϵ�е�80C552��CPU��ʹ�������Cϵ�y�Y����麆����ԓCP[J�����¹�������[4]��
������256�ֹ���RAM�������A����
������8·10λA��D�D�Q����
�����и��ٶ��rݔ���Ͳ�ݔ����еĶ��r����Ӌ������
������4�����r����Ӌ����(����һ���Oҕ���r��)��
������2·�}�_�����{��ݔ��PWM��
�����к�80C51��ͬ��ȫ�p���������п�(UART)��
������6��8λI��O�ڡ�
�����У�C�����ڡ�
������68�_PL,CC���b��
��ԓ�yԇϵ�y�У�ʹ�������е�3·A��D�D�Q���քe���齻��늉�������Լ�����늙C�����A��D�D�Q(���һ���D�Q��50���C������)��ʹ����1·�}���{��(PWM)ݔ������ֱ������늙C���Դ���}���{����̖(ԓ��̖�l�ʿ���92��5Hz��23��5kt{z�����Ⱦ��̣�ռ�ձȾ����{�����Ȟ�1��255���䌍�F��ֻ�茦����������ܼĴ����M�в�������)�����ⱊ���I��O�ڞ�ϵ�y�Uչ�ṩ�˷���(�籾ϵ�yֱ�ӌ�PPһ40��ɫ���L���Uչ��P4����)��6K�ֹ��đ��ó���̻���һƬ27C64�У�������һƬ62C64���S�C���A����
3��2��̖׃�Q
���y늙C����늉��������̖���Ƚ����܃x��늉������������׃��һ5��+5V����̖���ٷքe�����������·׃��O��5V����̖����ɘӱ������У�ؓ�d늙C�������̖����LEMģ�Kȡ�ӣ��ٽ����A��ͨ�V�����M��80C552��A��D�D�Qݔ��ڡ�LEMģ�K��һ�N���ڴň�ƽ��ԭ����������������䷴���ٶȿ�(С��1��s)�����ԶȺ�(�Ǿ���ʧ���<��0��1��)�������ȸ�(����1��)��
3��3ؓ�d��B���ƾ�·
��80C552����PWM��̖��һ�����_���M�й����ϸ��x���ٽ����κ�һ������ʽ�·ȥ�Ӵ���VMOS�ܡ�
3��4ݔ��ݔ��
һЩ����ָ��ͨ�^�Uչ��1 6�I�Pݔ�룬�yԇ��Bͨ�^�����g����ͨ�^�Uչ��6λ���a���@ʾ���yԇ�Y������������ͨ�^�Uչ��PPһ40��ɫ���L��ݔ����
4ܛ��ϵ�y
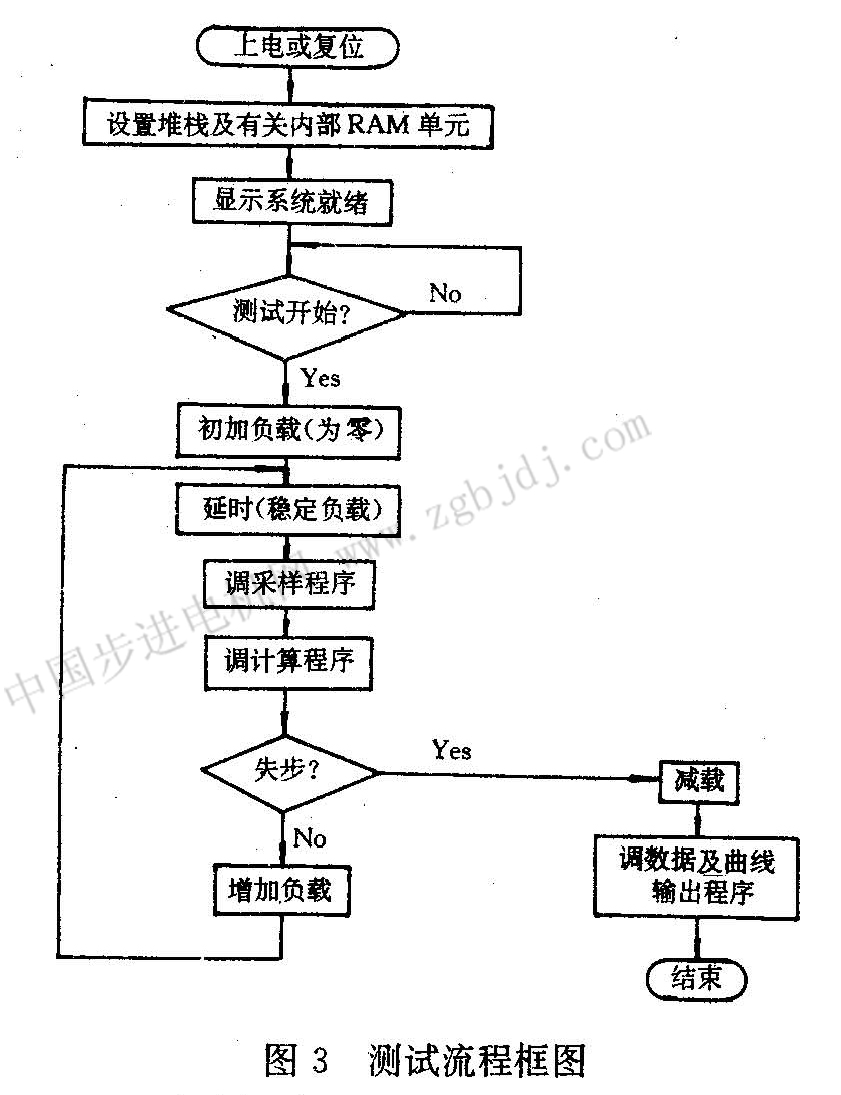
ܛ����Ҫ�������ơ��yԇ������̎�������֡�ǰ����Ҫ�������Ԅӻ��yԇ�^�̣����������ɘӡ��惦��늙C�\�Р�B��׃��ܛ����������ɔ����Ę˶�׃�Q���֏͔�����ֵ���΄գ���ͨ�^������ӡܛ�������y�����Ô��ֺ�������ʽݔ����ͨ�^�@ʾ�����@ʾ���@��o������ܛ�������̈D����D3��ʾ��
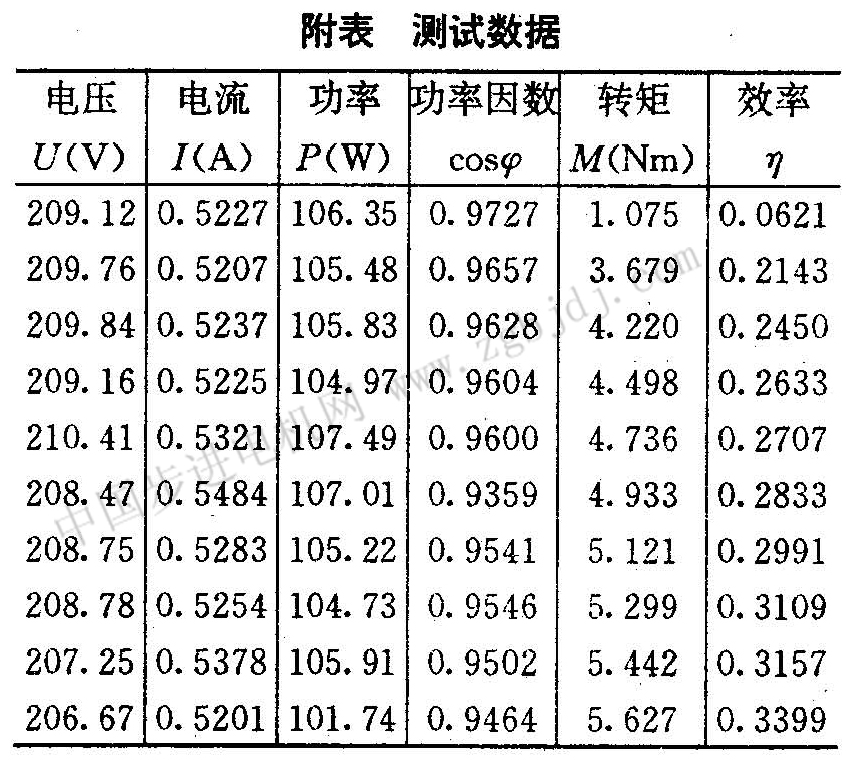
5�yԇ�Y��
������ʾ���ñ��yԇ�b�Ì�һ�_����ͬ��늙C�M�Мyԇ�õ��Ĝyԇ�Y����
6�YՓ
ͨ�^����ķ����ɵó��YՓ��
a���C���ԄӜyԇ������y���ֹ��yԇ�p�p�˄ڄӏ��ȣ������Ч��(�����yԇ�^�̃H�蔵ʮ��犱�ɵõ��Y��)��
b���yԇ���ȴ������ߣ��]�б��y늙C������������Ӱ푣�Ҳ�]���˹����A���`��ȡ�
C��������һ��CPU80C552�IJ��ã�ʹ�������yԇϵ�y��麆���� |