��Ƭ�C���S�S�����ܻ��y��ϵ�y
�R���� �J �� ������
����� �]�M�h (�������I��W)
1 ����
˦���D׃�������^�S�Ǿ��ܜy����Ҫ��Q���P�I�nj����O���D׃������ģ�M��׃�ɔ�������80������ڣ�����������Ƶ�14��12λXSZϵ�����D׃����һ�����D�Q���_������ˮƽi������һ�K��Ĥ���������Ϳ����ԭ�������K�p���·��������ɵ��΄ա���������ϵ�y������14��12XSZ�c���O���D׃�����ľ���ͨ����������ϵ�y��ǰ��ͨ·���S����Ƭ�C̎������Ѹ�ٰlչ��ʹ�ø��Ӿ��ܶ��ɿ������ܜy���ɞ���ܣ���ϵ�y�� ��8031�dz�����λ�������ܡ����ڔUչ�������`����ڔ���̎�����w�eС���r��͵����c�����F���S�S�ǵĔ����֕r�ɼ������ֽM�ϣ���ӡ�͔��a�@ʾ��ϵ�y���cPC-XT����ͨӍ���cͬλ��Ƭ�C����ͨӍ��
2 ����ԭ��
2.1 ǰ��ͨ·
���O���D׃�����д־��ɂ�ͨ�����q��r��c����ܾ��_Ӌ�rһ�ӣ�һ���ͨ����һ���O����ͨ����P���O����ϵ�y�x��P=32��14��12XSZ�����D�Q���քe�����O���D׃�����ľ���ͨ��ģ�M늉�ݔ���D�Q��14��12λ���M�Ɣ�����������ԓ�����D�Q�����ö��A�ŷ���·��ݔ���B�m��ۙݔ���S�ǵ�׃����ʹ�Õr�����D׃����ݔ����4�����ӷքe�ӵ��D�Q��D1-D4�ˣ�Ҋ�D1����ͨ�^��Ȳ�
���x׃�������Ԟ���������ʽ��ݔ��������
ʽ�� ��-----���D׃�����S��
�ٶ��D�Q���Ȳ�����Ӌ�����F�r���aֵ��գ��t���`��Ŵ������У�
�ɃȲ������z�������e������������ʎ���M�ɵ��]�hϵ�yʹsin(��-��)��0(����-0),
���@���^����ɕr������Ӌ�����Ĵ��aֵ�վ͵����D�Q�����D�Q�Y��----���y�S�Ǧȡ�����14/12XSZ�������l�ʞ�400HZ,���Ȟ�+4.5������ۙ�ٶȿ��_r/s���@�Ӿ���ͨ���քe����14xsg��I~XS2������ÿ�����S�S�ǽ��־��M�ϾͿɌ��F360��ȫ�ǜy������x�S������ǰ��ͨ·�Ӿ�ԭ����D1��ʾ������Ӌ��C���xȡ�����r���Ɍ���æ����̖M����һλ�������Bͬ14��12λ����һ���x��ȴ棬���M�Йz�y����M����ƽ���t�J�锵���oЧ����֮8031�ȷքeͨ�^���I��OоƬ��PC�ڵ�2λ��̖���i��G1��G2�ˣ�Ȼ��֕r�؏�8155��PA��PB���xȡ��ͨ����14λ�ʹ�ͨ����12λ2�M�Ɣ����ɡ�
2��2�־��M��
����늚��`�׃�Q���·�ľ����Լ��Ȳ�����Ӌ����ĩλ����׃�������´־���ͨ����****��Чλ�l����Ӌ����Ӌ�����䌦���x��������̎�ڸ�λ��ĩλ�������S���`��������p�x��ϵ�y�в�����һ�����Д༰̎�����Ϳ��ܮa���@�N�ִ��`�������Ч�����ϵ�y�y�����ȣ�����Ɇ�Ƭ�C����ͨ����12λݔ���a�M�мm�e��У����һ����O���D׃�����־�ͨ�������������32���O�����D׃��������ͨ������12λ�D�Q���r���y��������O��08789����360��������ͨ������14λ�D�Q���r���y��������0����11��25���־��M�ϵ�Ŀ���ǰ�12λ�ִa�c14λ���a�M�ϳ�һ��2�M�Ɣ�������ϵ�y����2�M�Ɣ������]���M�Ϸ�������һ�����ȣ�����߉̎���ό���Ƭ�C�ֲ���̫���s���ʲ���3λ�Uչ�M�Ϸ������ھ�ͨ����****λ��ֵ��5��625~�����Դ�ͨ�����ę�ֵ��5��625���ĵ���λ���λ���3λ�����c��ͨ���3λ�M�нM�ϵĔUչλ����D2��ʾ��
2�M��3λ�Uչ�IJ�eҎ�t�飺��һ����3/8�����Ӳ��p����һ����5/8����1����һ�֡�5/8���p1���@��ٶ�4/8һ0��5����r�����l�������`�������O��5[1]���@�ӿ��ô�Ҏ�ɡ�U����ֵ�����1��ʾ��
�ɾ�ͨ��ȫ��14λ���ͽM�Ϻ�Ĵ�ͨ����5λ������һ��19λ2�M�Ɣ���
3ϵ�yӲܛ���OӋ
3��1ϵ�yӲ��
���y��ϵ�y��80 31��Ƭ�C������оƬ��ͨ�^74Ls373�i�����Uչ��һƬ2764EPROM������ԓϵ�y���ڌ��r�����ɼ�ϵ�y���������A����������8031�Ȳ�RAM��o���M���o�BRAM�Uչ��Ӳ��ԭ��D��D3��ʾ��
���˿��ٌ�ij�r�̵Ĝy���Y����ӡ����������GPl6���FӲ��ؐ������P�������xƬ��̖����GPl6�ġ�Busy����̖�͵�INTl���������Д�[2]����8031�Ĵ��п�ͨ�^MCl488��MCl489���F�ƽ�D�Q��ʹ8031��TTI���ƽ��PC��XT����RS 2 3 2�ڵġ�12V��̖�ƽ�܉F����ͨӍ[3]��ϵ�y�Ĕ����ɼ�����һƬ8155���F��������A������־�ͨ���ĵ�8λ����ݔ��ڣ�B������־�ͨ�������λ����ݔ��ڣ����õ�λ��ͨ�^���Ӹ��ƽ����8155��C������x��y��Z���S�ǵ�������ͨ����������ͨ���Ĕ����i����̖����Ƭ�CֻҪ�֕r�ؿ���C�ڌ���λ�����ɏ�A��B�ɿ��ϫ@��ijһ�S�Ǵ�ͨ����ͨ����12��1 4λ2�M�Ɣ�����D6--�˽o�S���i��ϵ�y��ͬλ��Ƭ�C�ṩ���r���������ò��Д�����ݔ��������˔Uչ��һƬ8255���F����ͨӍ��ÿһ�S�ǽ��־��M���Ժ�׃����һ��19λ2�M�Ɣ�������8255��A��B��C�����Ό��ɞ锵���ĵ�8λ��8λ��3λ�������@ʾ���֣������o�B�@ʾ����8031��P1���ͳ�8λ������P1.0��P1,3��74Ls138��ݔ����̖��P1.4��P1.7�����@ʾλ��BCD�a����������ÿһ���@ʾλͨ�^һƬMCl4495�M���g�a���i��Ͱ˶Δ��a���ӣ�����һ���g�a���t����8��LED��λ����̖������LED������Ϣ�@ʾ��LED1��LED3���ڶ��@ʾ��LED4��LED5���ڷ��@ʾ����LED6��LED7���ڽ����@ʾ��ϵ�y�Ŀ��Ʋ��֣�����һ�I���ü��g����������һ�����o���һ��λŤ�hӋ�������F��һ��ѭ�h����������4����B���_�C���0��B��ÿ��һ�°��o�@ʾ��B��һ�N��B������һ�N��B����
��ʮ�ַ��㣬��ӡ�C������һ�_�P�팍�F��ֻҪ���_�P�ܵ�ON�ȼ��ɴ�ӡ��ijһ�r�����S�ǵČ��y�Y�������քe�öȡ��֡���(10�M��)��2�M��ʾ�������������ˆT�M�Д���У
���ֹ�������ڸɔ_�������w������Ӳ����߀�OӋ�ˡ����T�����·[4]��һ��������PCָ��`�����t��Ѹ�ٵ؏�λ��ʹϵ�y�M�������yԇ��B��
3��2ϵ�yܛ��
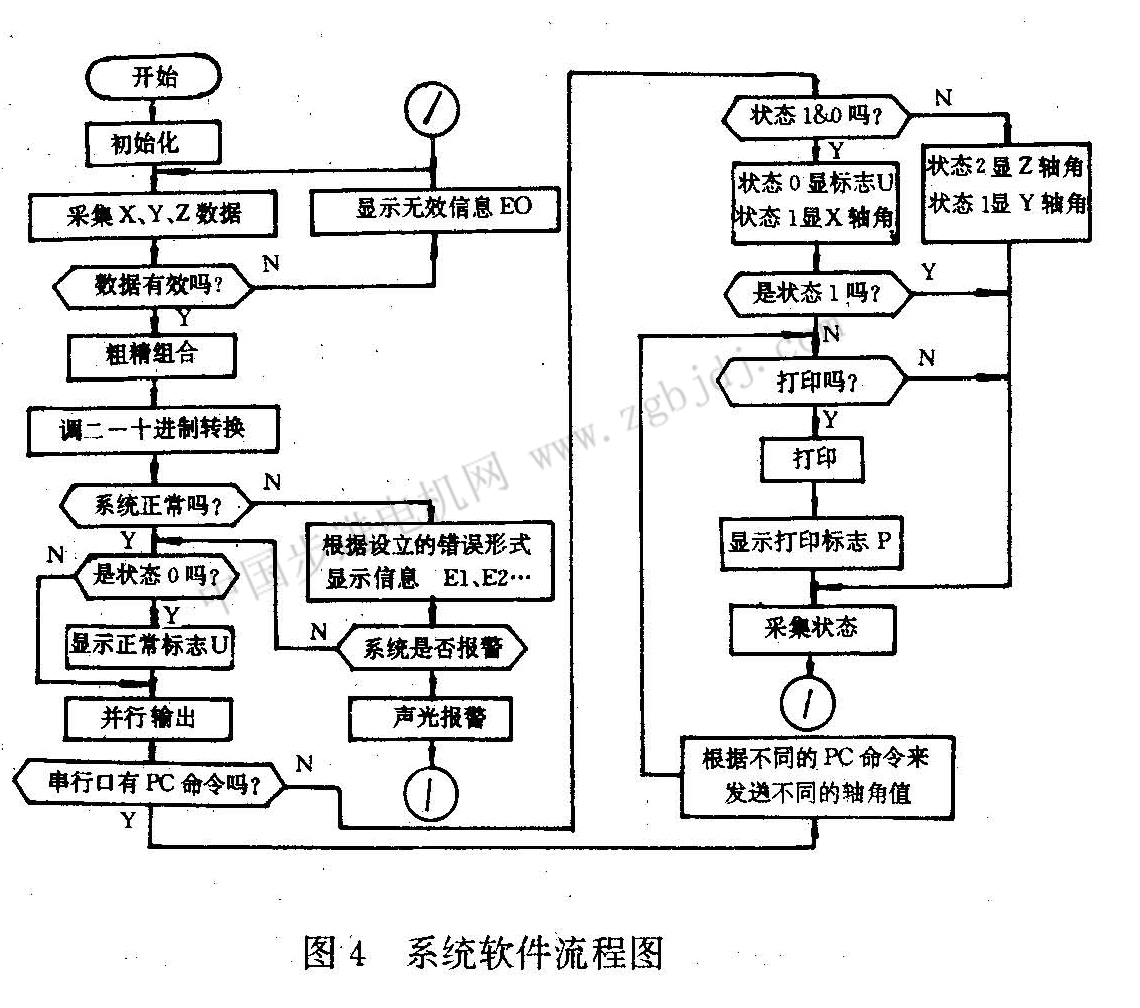
���y��ϵ�yܛ������8���֣�����ʼ�������ɼ����־��M�ϳ�����ͨӍ����ӡ����2��10�M�Ƹ��c���D���@ʾ��������س����������س�����Ҫ����Д������B�������g�f�{�������\�ࡢ���e���Ԅӏ�λ�ȿ��w�����΄ա�ܛ�����̈D��D4��ʾ��
�@�������B���Д����������c�����_�PK�ʹ�ӡ�_�PP����ρ���ɵģ�ϵ�yͨ��Ժ�����B��0���@�r��P����0Nλ�ã��t�@ʾ����Ϣ�^LED���@ʾA�����@ʾ�^
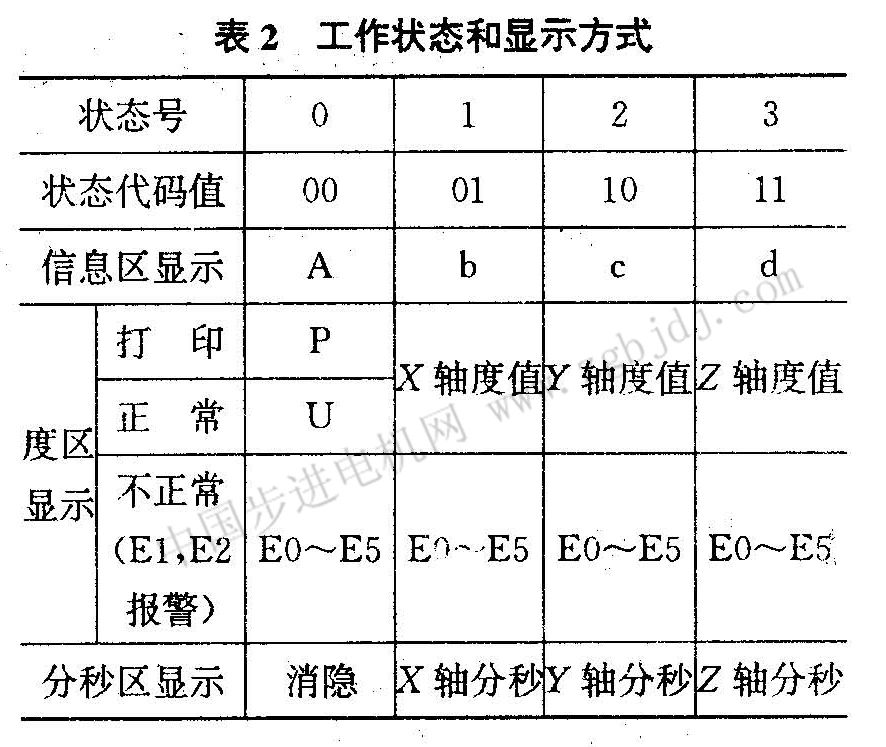
�@ʾP����ʾ�@�r��ӡ�C��ÿ�y��һ�����S�S�Ǻ���ӡһ�Ό��yֵ�����_�PP����offλ�ã�LED�����@ʾA�������˕rϵ�y�Թ���O��B���@�r�ȅ^�@ʾ��ϵ�y�����\����־����ϵ�y�����������t�ȅ^�@ʾU���������r�������\���r�@ʾ���ȅ^�@ʾE0��E1�ȣ��磺E0��ʾ14��12XSZ"}f=0���˕r�ɼ��Ĕ����oЧ��E1��ʾ���������E2��ʾ�־��M�ϳ��e��E3��ʾ���пڔ����l�ͻ���ճ��e��E5��ʾ��ӡ�C��æ��������һ��K�I�r��ϵ�y����0��B�M��1��B���˕r��Ϣ�^�@ʾb���ȡ��֡���^�քe�@ʾx�S�ǵĶȷ��댍�yֵ�����ΰ�K�I�r���քe�M���B2�͠�B3��������Ϣ�^�քe�@ʾc��d�����ȡ��֡���^�քe�@ʾy��z�S�ǵĶȷ��댍�yֵ���@��4��������BO��3�ͷքe����Ϣ�^�@ʾ��A��b��c��d�����������ٰ�һ��K�I�t���M���B0������ѭ�h���乤����B���@ʾ��ʽ���2��ʾ��
����ϵ�y�����ڠ�B1��2��3�r����ʹP����ONλ�ã���ӡ�CҲ���������˕r���ϵ�y���������t������B��׃���ȅ^�������\����e�`��ʽ���@ʾ��������Ϣ��ֻ��ϵ�y���������r�����BO�ǘ��@ʾU�������@ʾx��y��z�S�ǵČ��y�ȷ���ֵ����������Bԭ����O��BP�@ʾ��ʽ����ô���ˈl�����⣬��ӡ�C�������e�`����Ȼ��������������ȅ^ԓ�@ʾ���e�`��Ϣ��Ȼ�@ʾ��һ���e�`��ʧ��ϵ�y��������0��BP�@ʾ��ʽ�¡�
�����g�ąf�{�΄���Ҫ�Ǹ��N�Д����_�rϵ�y�ӳ�����{�úͅ����Ă�ݔ�������\����Ҫ�nj�ϵ�y�ⲿ��B���L���̓Ȳ��\�еıO�y���Լ������O�õķ����\�࣬���e��Ҫ̎�����N�e�`�Ĺ��ϼ��e���^�������ș�Ƿ��횈�������S����r���ڸɔ_�����ͻ׃��һ���ɔ_��ʧ�tϵ�y��̎�������������m���@ʾ�Oҕ�������������ԁyͣ�C�������Ԅӏ�λ������Ӳ�������T�����·��ܛ�����׳�����Ŀ���Ǯ�����ѭ�hһ���Ժ�o�䡰���T�����·�е�Ӌ�������㣬��δ���㣬�t�J��ϵ�y����Ó܉������ѭ�h����ô��Q�@�N�����w���ɔ_���k�����ǡ����T�����Ԅӽoϵ�y��λ��
4�Y�Z
��ϵ�y��һ���ܻ��y��ϵ�y������8031�YԴ�õ��˳�ֵ����ã�����ʹ����һ�I���ü��g����庆�Σ��������㣬���϶��LDE�@ʾ���g��ʹ�ò����ˆT�����˽ϵ�y��һ���\�Р�B��14��12XSZ�IJ��ú͇��ܵ�ܛӲ�����ɔ_��ʩ��ʹ��ϵ�y�ɿ���. |