ժҪ���OӋ�ˑ����ڰ댧�w���b�O���z���C�ĸ��ٸ߾���ֱ��늙Cx-Yƽ�_�����������_�����١��߾���푑����Լ������ɔ_�ͅ������_��������Ӱ��µ������ԡ�ͨ�^��PI��������PDF��������PDFF�����������ܱ��^���x��PDFF�����ٶȭh��������PlD����λ�íh���������p�h���Ƽܘ����������A��ϵ�yģ�͡����û���cRs�㷨�������������M�Ѓ���������͌��Y���C����ԓ���Ʒ����������õ�푑����ܺ������ԣ����ٶȿ����_��5 g���{���r�g��4ms�ԃȡ�
�����P�I�~��ֱ��늙C���������R��PDFF��������cRs�㷨�����
O �� ��
ֱ��늙C��ϵ�y���ڜp�������g�ķǾ��Ԃ��ӭh�����܉�ܺõ؝M��F����ӷ��b���g���ٸ߾��ȵİlչ������ֱ��늙C�ӵęC��\�ӿ���ϵ�y�Ľ�ģ���������S���W�߶��M�������P���о�����ȡ�����@���ijɹ������ٸ߾���ϵ�y�ʬF�Ǿ��ԡ����A�Ρ���׃������r׃������ϵ����c������@�ϵ�y��ģ�ͱ��^�y�Խ��������h�����ø��N�����W��Փ�Ϳ�����Փ�����ϵ�y�Ľ�ģ�M��_��������о���shigeru Futa��mi�Ȅt���Ä����W�О��Ӌ��C�����cţ�Dһ�W������Y�ϵķ�����ϵ�y�M�н�ģ���о��ɽ���ֱ��늙C�ӵIJ��ÝL�錧܉�ľ��ܶ�λ���_�������W���}���������������W���ԣ��քe��ƽ�_�ֶ�λ�;���λ�r��ʩ��Ч�ؿ��ơ�M��Jouaneh�����Å������R����������x��Yƽ�_�Ą����Wģ�ͣ��������l��푑�ԇ���������Ą����W���ԁ��������Wģ�ͣ��ڴ˻��A���OӋ�ˎ���PID�]�h���������б�ѩ���ͨ�V�����Ŀ����������OӋ���]�h����ϵ�y�ķ����r�g���_�hϵ�y��1��3������ᘌ�danaher PLA_rJNuM(DDL)ILl8һ075ֱ��늙Cϵ�y�M��ϵ�y���R�õ����Aģ�Ͳ��M�н��A̎����Ȼ��������õ��Aģ���OӋH��PDF��PDFF�ٶȓQ��������ͨ�^�����x��PD��FF�����������ٶȭh��������λ�íh����������PID����������ͨ�^cRs�����������������M��
������
1ģ�ͱ��R
����ͨ�^����ģ�͌�ϵ�y�M�б��R�����Oϵ�y��ݔ���(t)��ݔ��y(t)�þ��Բ�ַ��̱�ʾ
y(t)+a1y(tһ1)+����+any(tһn)=b1u(tһ1)+������+bmu(i��m)
���f����ģ�͞飺
y(t)=G(g)u(t)+H(g)e(t)
����B��Jģ��ݔ��ɔ_�����P�����Ա��IJ���B��Jģ�͡�ԓģ�ͱ��_ʽ�飺
����B��Jģ��ݔ��ɔ_�����P�����Ա��IJ���B��Jģ�͡�ԓģ�ͱ��_ʽ�飺
ϵ�y���R����ݔ����̖���x����Ҫ������Ҫ��
���ڌ�����У�Ҫ��ݔ����̖���l�V��횸��wϵ�y���l�V���܉��ּ���ϵ�y������ģ�B��
�ڱ��Cݔ����̖��ϵ�y����ؓ��_�әC�����ȡ����x�_�����Ӟ飺
�_������ԽС��ϵ�y���R�Y��Խ�ʴ_�����Կ���������Сֵ��l��
��������M���к����S�����l�ʳɷ֣������V�ܶȺ����ڸ����l���c�ϵķ�ֵ����ȵģ�������_�����Ӟ�1�������õ�ϵ�y���Rݔ����̖������ֱ��늙Cϵ�y�����ڲ����ڌ��z�ܵȵ���Ԫ���ě_����M���и������롣
����ͨ�^���õ�ϵ�y��λ��푑��l�ʴ�s��200 Hz������ϵ�y�ڼs350 Hz��700 Hz�r���F�����ģ�B����ʴ_�õ�ϵ�y�ĵ��lģ�ͺ����ģ�B����ȡݔ����̖��ֹ�l��fm=10000Hz���������r�ɘӶ���ȡTs��1��(3fm-4fm)���òɘ�����Ts=2 5 kHz��
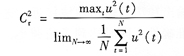
�������R�õ����،�����xɢ��ʽ�Ă��f�����飺
����ԓģ�Ͳ������ʽ����Ҫ�����M�н��A̎����̎����ĽY����

̎��ǰ��ϵ�y��bode��D1��ʾ�����Կ�����1 kHz�l�ʷ����ԃȿ�����ȫ�Ǻͣ���ȫ�M����Ҫ��

����2���Ƽܘ��x��
��ϵ�y��������h���ٶȭh��λ�íh���h���Ƽܘ���ͨ������h�����{��������PLD��������P���������^��Ҋ�����ăH��BPDF��������PDFF��������
����PDF(Pseudo��Derivative��Feedhack)���Ʋ��Ծ���푑��ٶȿ졢�o���{�������ԏ������ɔ_���ܺõȃ��c��PDF��������PI�����������ƣ����зe�֭h���ͱ����h������ͬ����PDF������ʹ�������`����̖��ͨ�^�e�֭h�����@ʹ��PDF��������PI������푑��ٶ��������Džs������PDF����������߷e�����棬�Ķ�ʹϵ�y�܉���õ����Ƶ��l�εĸɔ_�����ϵ�y�������ԡ�PDF��������ݔ���飺
����ICMD=(KvI��(VPCMB-VFB)dt-VFBKv��PDF����������ǰ���h���γ���PDFF��������ԓǰ���h�����ɱ�������KVER�Q���ġ��@һǰ��ʹ����ݔ�������ڽ��^�e��֮ǰ�M��ϵ�y���Ķ�ϵ�y��푑�����Ѹ�١�
����ͬ�rPDFF�������nj�PI��������һ�N��չ��ͨ�^��PI���������㷨����ʹ���{�pС�������S���l�ξ��кܴ�Ą��ȡ�PDFF��������ݔ����IcMD=(KVI��(VPCMD-VEB)dt+KVFR VPCMD-VEB)KVPDF��������PI�����������Կ�����PDFF��������������Ҳ����KVFRȡ�O�ޕr����r����KVFR=1�r��PDFF������׃��H����������KVFR=0�r��PDFF������׃��PDF������������0
�����������ă��c����PDFF��������PDF��������PI�������ľC���w�F��
�������Կ���PI�������mȻ푑��ٶ��^�죬��������e�������{�úܸ���ʹ���l�ο��ɔ_���������ĕr�t��ʹϵ�y�a�����{���෴PDF�������t����ʹϵ�y�ڵ��l�εĿ��ɔ_����������푑��ٶ��^PI�����������ܶ࣬������PDFF����������ͨ�^�{��KVFRʹϵ�y���ڵ��l�ξ��кܺõĿ��ɔ_�ԣ��ֲ����a���ܴ�ij��{��ͬ�r߀���Ա��Cϵ�y��푑��ٶȣ������ڱ����ٶȭh�ϲ���PDFF��������
����3 cRs�㷨
cRs�㷨����G0ucher��casares��1978������������㷨���ګ@��ȫ��****�ⷽ��dz���Ч��
�������ڱ��n�}��ʹ�õ�PDFF+PID���ƽY������cRs�㷨����****�⣬��һ�N���I�Ͽ��еķ����������܉��a���ڵ�����������Ziegler��Nich01s�㷨���O�c���õȷ����ڿ����Է���IJ��㡣
����cRs�㷨�֞�ɲ��֣���һ���֑���˺���㷨�p������Ҫͬ�r��Q�ĵ�ʽ�s����������һ��������������Ҏ�ɵľ�ꇣ��a��һϵ�п���Ӌ��δ֪����Ҏ�����ڱ�Ҫ�ĕr����ͬ�r���M��ʽ���̡�ԓ�㷨���殐�c̎���Ǿ��ԅ^�����׃�����ſɱȾ�ꇽӽ��殐�r���������FһЩ���}���������@Щ���}�ڌ��Hϵ�y�ж��Ǻ�����Ҋ�ġ�
������cRs�㷨�ĵڶ����֣�cRs�㷨��һ���Ñ��Զ��x�ij�ʼ�c�_ʼ�ь�****�⣬Ҳ�����ԄӮa��һ���Ќ����еij�ʼ�c�����ø�˹�ʄt��ÿ�����c�M�е������ј˜�ƫ����������һ���Q���������ĺ�����Ӌ�㡣ԓ�Q������������������һ������k1�Q��(k1��Ĭ�Jֵ��1��3)��ͨ�^���ʽ����C���c�Ŀ����ԣ������˲���ʽ��C�����е�ʽ���������^��ţ�D�����깫ʽ��������Lԇ�ܶ�ζ��]�нY���r���˜ʛQ���������������pС�����c��һ������k2���(k2��Ĭ�Jֵ��1��2)���Lԇ�ĴΔ����ena����n��Q����׃���Ă�������e�����������(��e��Ĭ�Jֵ��25)����һ���܉�ʹĿ�˺��������Ŀ����c���ҵ��r��һ���µĵ������_ʼ�ˣ��˜�ƫ�����Ԫ��Ҳ�ͱ������ˡ��Ք��ʄt�ǻ���Ŀ�˺����͛Q����׃����ǰ�������x�ʄt�ij������������ġ�
�����������һ�γɹ��ćLԇ֮�˜�ƫ�������ͱ��{���飺

�����˕r�õ���xi��������ą�������ʽ�н���ȡ��=O��001�������xȡ���{�����{���r�g���酢��������Ŀ�˺�����
����4����͌��
(1)�ٶȭh���漰������ʽ(3)���õ�ϵ�yģ�ͣ�����cRs�㷨���{���r�g�ͳ��{����Ŀ�˺��������ٶȭhPDFF�������ą����Y����KV=3 570��KVI=9 247��KVER=0.8ϵ�y�Է���������D2��ʾ��ͬ�������µČ��Hݔ��ݔ��������D3��ʾ�����Կ�������ͬһݔ�룬���Hݔ���ͷ���ݔ�������ӽ����Mһ���C����ģ�͵Ĝʴ_�ԣ�ͬ�r�_���˳��{С���{���r�g�̵�Ŀ�ˡ�

����(2)λ�íh���漰���ں���PID����������λ�íh�Ŀ�����ȫ�h���Ƽܘ�������cRs�㷨���{���r�g�ͳ��{����Ŀ�˺�����PID�������ą����M���������õ��ą����飺KP=9 049��Ki==6 269��Kd=190��
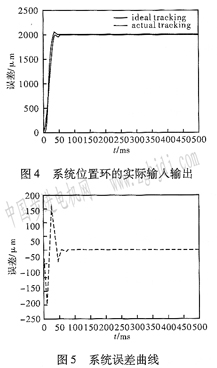
����ϵ�y�Č��Hݔ��ݔ��������D4��ʾ���`��������D5��ʾ�����Hϵ�y�{���r�g4ms�����{6�����_��Ҫ��
����5�YՓ
PDFF�����������ٶȭh���������ȿ����^��PI�������Ŀ����ԣ��������ϵ�y�������ԣ�����ڌ������Ժ�������Ҫ��ܿ��̵ĸ��ٸ߾���ֱ��늙C��ƽ�_�Ͼ��кܸߵđ��Ãrֵ����λ�íhPID+�ٶȭhPDFF���Ƽܘ��£�����CRS�㷨�Գ��{�����{���r�g��Ŀ�˺�����ϵ�y�������M�Ѕ����������õ�****�Ŀ����������M�ϣ����_���OӋĿ�ˣ����a�˂��y�����������ڿ������ϵIJ��㣬���������ք��{���ķ������ܺõĝM���˹��I����Ҫ��