����ժҪ��ͨ�^��늄���܇�\�����Եķ��������p�O늙C�ĽY����ԭ�������������늙C���M��һϵ��˼·����ԇ��������12��8�O�Ͷ���8��12�O׃����ʽ݆ݞ늙C��������Y����늄ӡ��l늺�늴��Ƅӹ���ԭ�����^���M��������������늙C��ʹ�ÿɴ��늄�܇�v�ęCе�Y����������ԃr�ȣ��������ƏV늄���܇���ܜp�����^�õ�Ч����ԓ늙C����Ո������
�����P�I�~���l늻�����늴��Ƅӣ�݆ݞ늙C���O�X��
0�� ��
늄���܇�����õ�݆ݞ늙C��Ҫͬ�r����늄ӡ��l늺�늴��Ƅ����N���ܣ���������늄��\�Еr�����^�õ��{�����ܡ�ͨ�^����ǰ���݆ݞ늙C�ĽY��ԭ�������Է������_�������p�O늙C��
�����F��늄�܇�v����늙C���mȻ����늄ӡ��l늹��ܣ�����������늴��ƄӵĹ��ܡ����˿˷��F��늙C������늴��Ƅӹ��ܵIJ��㣬����ͨ�^����늙Cģ�ͣ���θ��M�OӋ������ģ�Mԇ�\�У��e��ͨ�^�����OӋ늙C�p�O�X���۵��������Ⱥ��@�M�Ŀ��g���ֵȴ�ʩ������ߺͼ��늄ӡ��l늺��Ƅ����N���ܵ�늙C���ܵ��^�ðl�]��
����1���p�O늙C�ĸ��M˼·��������늙C��늴��D�ع�ʽ
������֪���Ō�(늸�)׃����Խ��늴��D��Խ��ӳ��늙C�Y��Ҳ����늙C�O�۾�(����)�ĜpС���������ݔ��늴��D��Tem��ˏĽY���ρ��f�������m���pС�۾࣬�Ķ������O�X���������O�X��������Ҳ������늙C�����Ƅ��\�Еr��������늴��Ƅ����أ������ְl�]늙C������늴��Ƅ�Ч�ܣ�Ҫ���@�M���mͨ늕r����ʹ�����D�ӈA���ϵ��O��늴��������غϵĘO��߅��M���ܴ�(�������늙C���O�X��һ��С����ی�)����ˣ���ͨ�^�O���p���@�M�����͜pС�����������ȃɂ�;���������O�X���������@�M�����Ĝp�٣�Ҳ�ɜp�������Ĺ����_�PԪ�����������ڽ��ͳɱ���ͬ�r���]����pС늙C���ٕr���D�ز��Ӷ������������ӣ����O��ͨ�^���ӘO����pС�D�ӘO��Ǧ�er����Ҫ��ͬ���@�M���������O�ϵ��@���෴����ͨ늺����a���Ĵň��O���෴�����O�ϵ��@�M�Դ���ʽ�B�ӡ�
������֮�����˼��늄Ӻ��Ƅӹ��ܣ�늙C���OӋԭ�t�ǣ�ͨ�^�p�������͜pС�����������ȁ������O�X�������늴��Ƅ����أ�ͨ�^���ӘO����pС늄��\�Еr���D�ز��ӣ����pС����ǡ�
�������⣬Ҳ�ɲ��ø�׃�\���Ĕ�������ͬ���M늙C���ü������·�ķ�ʽ���O���pС����ǡ�
����2늙C�Y���ĸ��M
������������˼·�����l��늙C�������@�M���M�����ٵăɷN�Y��������������ࡣ����քe������
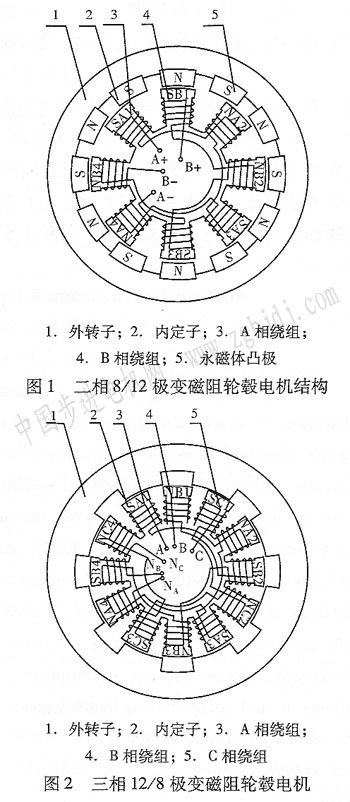
�����������늙C�ĸ��M�Y����D1��ʾ�������c���D���O�X�����ڲی���ͬ�r���ӘO��С���D�ӘO�������ӘO����4�������������D�ӘO����6��������(�������늙C���������ڵ���3�������D�ӘO��ͨ��С�ڶ��ӘO��)����pС늄ӕr���D�ز��ӣ���ͨ�^���ӘO����pС����ǣ��䱶���������3��4��5����ʹ늙C���������������������������Ҫ���D���O�������w�����Ը������g�����С����������w�����D���ϣ��\�Еr������܇݆݆����Ȼɢ�ᣬ���������w�ڸߜ��³��F�˴ŬF��ͬ�rҪ��ͬ���@�M�������O�ϵ��@���෴����ͨ늺����a���Ĵň��O���෴�����O�ϵ��@�M�Դ���ʽ�B�ӡ��D1�����D�������w�O5���X���OӋ��20�㣬�۾���10�㡣��ȶ��ӵ��O�X���OӋ��22�㣬�۾���23�㡣
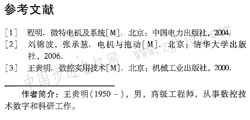
�����������늙C�ĸ��M�Y����D2��ʾ�������c�Ƕ����D���O�X�������ڲی�(�������늙C�Ķ����D���O�X�������ڲی�)��ͬ�r���ӘO��zs�����D�ӘO��zr�����ӘO����6�������������D�ӘO����4������������pС늄��\�Еr���D�ز��ӣ���ͨ�^���ӘO����pС����ǣ��䱶���������3��4��5������Ҫ��ͬ���@�M���������O�ϵ��@���෴����ͨ늺����a���Ĵň��O���෴�����O�ϵ��@�M�Դ���ʽ�B�ӡ��D2��늙C���D���O�X���OӋ��26�㣬�۾���19�㣬��ȶ��ӵ��O�X���OӋ��18�㣬�۾���12�㡣
��������늙C�\�Еr��Ҫ������܇�\�еČ��H���r�S�r��׃늙C���\�з�ʽ��ʹ���\����늄ӡ��l늻�늴��Ƅ���һ�N��B�¡���ˣ�����׃����늙C�\��ԭ�����谲�b�D��λ�Ùz�y�b�ã��ɲ��ýӽ��_�Pʽ������ʽ�����ʽ�ȸ��N��ʽ��
��������߿��ɔ_�����������˹��ʽ���������������D���O�ķֲ�λ����һ��a�P���c���D��ͬ�S�B�ӣ����ڃȶ�������λ���ϰ��b�����Ɍ��������_�P���a�P�c�������_�P��ϼ��əz�y�D�ӵ�����λ�á�
����3 늄ӡ��l늺�늴��Ƅӹ���ԭ��
3��1늄��\��ԭ��
������f�������Ȳ��ÈD2��ʾ������12��8�����O����늙C******�Ć������\�з�ʽ�������乤���^�̡���ij���@�Mͨ늕r�����a���Ĵň�������ʹ��·����p�٣������������Dͨ�^������С;�����D�ӌ��ܵ������D�����ã�ʹ���D�ӵ��O�X�cԓ�ඨ�ӴŘO�ϵ��X���غϡ����@һ�^�̽ӽ���ɕr���m�r�Д�ԭ����������������ͬ��ʽ�o������һ����ţ��t�_ʼ�ڶ�����ȫ���Ƶ������^�̡���ˣ�늙C��ͨ�^�D��λ�Ùz�y�b�Ùz�y�����D�ӵ�����λ�á����ԈD2�ж����D����̎λ�Þ���ʼ�c������݆����A��B��c��A���ͨ늣����D�Ӿ͕�����ذ���rᘷ����D�ӣ�����A��c��B��A�����ͨ늣�늄әC�͕�형rᘷ����D�ӡ�ԓ늙CҲ�ɲ����p���Ļ����ķ�ʽ�\�С��p���ĵ�ͨ늷�ʽ�飺AB��Bc��cA��AB�������ĵ�ͨ늷�ʽ�飺A��AB��B��Bc��c��cA��A��ÿһѭ�h�����D�Ӿ��D�^45�㣬�����ĵIJ���Ǟ�45��3=15�㣬�����ĵIJ���Ǟ�45��6=7��5�㡣
������M��늄���܇��늙C���{��Ҫ����늄���܇݆�\�Р�B�£����ٕr횲�������ز����ƣ��Եõ����D���{�ٿ��ƣ����ٕr횲��ýǶ�λ�ÿ���(APc)��Q���}�_�|�lģʽ���Ԍ��F�㹦���{�ٿ��ơ�
����3��2�l��\��ԭ��
��늄���܇�轵�ٻ������\�Еr������������ܑT�ԁ팍�F�l늻����Ƅӡ�����ǰ����늴��D�صĻ������_ʽ�ķ�����֪����늸�L�S�D�Ǧȵ����Ӷ��p��(�����D�ӵİ���څ���@�M�O)�r���@�M����t�a��ؓ��늴��D�أ���늴��D�؞��Ƅ��Եģ�늙C�\���ڰl늙C��B��ͨ�^�D��λ�Ùz�y�b�ã����z�y�����D�ӵİ���څ����ijһ�@�M�O�r�����̽�ͨԓ���@�M�·�������D�ӵ���һ�O�ӽ�ԓ�@�M�O�r���Д�ԓ���@�M�·��
������˷��ͼ������}�_��ʽ�o��늳س�늡�
����������Dl��ʾ��늙C��������߰l��^�̣����m������늙C�İ��ی��ȡ����^���Ҳ���pС�O�X���ȣ�����늴��Ƅ�Ч������Ӱ푡�
����3��3늴��Ƅ�ԭ��
��늄���܇���ٺ����Ƅ�ֹͣ�r�����ڈD1����8��12�O����늙C���f���ɱ���ijһ���@�M���mͨ늡���D1����ʾλ�ã�����B���@�M���mͨ늺�a����늴��ƄӶ����ֵĶ��D������λ�á�
�����ɈD1��֪��늙C�A�ܵČ��Q��߅����һ���O��늴�����ס�����غϵĸ��O����Ӻ��係�O��߅����_80�㣬����A����OҲ���ֱ������w��ס�����ڈD2����12��8�O����늙C���f���ɱ���ij�����@�M���mͨ늡���D2����ʾλ�ã�����A��c�����@�M���mͨ늺�a����늴��ƄӶ����ֵĶ����D������λ�á��ɈD��֪��늙C�A�ܵČ��Q��߅���ЃɌ��O�X��늴�����ס���������غϵĸ��O����Ӻ��係�O��߅����_1 16�㡣
�����箔늙C���ڄ��ܑT���^��r�������Ì��D��λ�õęz�y���������c�l늻����Ƅ���Y�ϵķ��������M�У�ֱ���D�Ǧȵ�λ�Ùz�y�o׃����ֹͣ��ֹ���@�N늴��Ƅӷ�ʽ����ڬF���I܇�еķ������Ƅ�ϵ�y(ABs)���Ƅ��^�̣������܇�v�����D��ٿv�Ժͷ����ԡ�
����ͨ�^����������8��12�O����늙C�c����12��8�O����늙C�ĽY�����\��ԭ���ķ������^���ɿ�������6��4�O����늙C�������ã�����****������
|











