ժҪ��ᘌ��oˢֱ��늙Cֱ���D�ؿ���(BLDcM DTc)�д���^�y���y�����Ə��s�Ȇ��}�������һ�N�����ڟoˢֱ��늙C������ͨ��ʽ�µ�����ֱ���D�ؿ��Ʒ�������늙C���l�����{�ٕr����ȥ�˳�Ҏ�Ĵ���^�y���ƭh�������M���D��Ӌ�㷽����ͨ�^�D���h�����x����ʩ�ӵĿ��g늉�ʸ����ԓ���������˿��ƽY���������˿��Ƴɱ������F�˟oˢֱ��늙C��ֱ���D�ؿ����\�С������ԇ�Y������ԓ����������Ч��
�����P�I�~���oˢֱ��늙C��ֱ���D�ؿ��ƣ����g늉�ʸ�����D�أ����h����
0 �� ��
ֱ���D�ؿ��Ƽ��g���^ʸ������֮��һ�N�����ܽ����{�ټ��g�������ÿ��g늉�ʸ��ֱ�ӿ����D�أ�����Ҫ���s������׃�Q����˾��нY�����μ��ӑB푑��ٶȿ�ȃ��c�����ǣ���ֱ���D�ؿ��Ƽ��g�����ڟoˢֱ��늙C߀��һ���µ��о��n�}��
����Ŀǰ���oˢֱ��늙C��ֱ���D�ؿ��Ʒ������w�����ɷN����������ͨ��ʽ�µ�ֱ���D�ؿ��ơ��@�N���Ʒ�ʽʹ�oˢֱ��늙C������������ͨģʽ���������P��������朵�Ӱ푣�����朽o��ֵ�O��һ������ͨ�^������늉�ʸ�����ƶ��Ӵ�朵��\���ٶȣ��Ķ����F��늙C�{�١����ڶ��Ӵ���O����һ��ֵ�������������ƫ�x�����^��������^����D���}�ӡ����ң����ڴ���^�y�`�������r�r���Ӵ���\��܉�E��׃���أ�늙C�\�����ܲ��á��ڶ�����ͨ��ʽ�µ�ֱ���D�ؿ��ơ�ԓ���Ʒ���ͨ�^�z�yĸ��늉��Ͷ��������ֱ��Ӌ���늙C�Ĵ�机��D�أ����Ãɂ����h���^���x��****���g늉�ʸ���ķ�ʽ���F�����Ӵ�机��D�صĽ�����ơ������ڟoˢֱ��늙C�\���У������P����늉��IJ��_���ԣ����Ӵ�朷�ֵ�S���gλ�ò�ͬ���r��׃�������Ӵ�朵��^�y�ͽo���dz����y�����ң��D���^�y�а�������헕����Ϳ��ƾ��ȣ�����Ӌ����������ϵ�y���r�ԡ�ᘌ����φ��}�����������һ�N�·f������ֱ���D�ؿ��Ʒ�������늙C���l�����{�ٕr����ȥ���s�Ķ��Ӵ�朿��Ɯ��h���������D��Ӌ�㷽����ֻ���D���h���F��늴��D�ص�ֱ�ӿ��ơ�
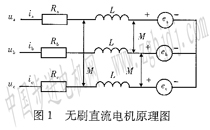
����1�oˢֱ��늙C���Wģ�͈D1��ͨ�����õğoˢֱ��늙Cԭ��D�����˺����������������¼��O��
����(1)�����@�M�����������@�M��(2)�����]�X��Ч���ʹ�·ͣ����ԴŜ����u�������wЧ���͜ضȌ�늙C������Ӱ푣�(3)���ඨ���@�M���Q��(4)�����@�M�ķ�늄ݞ黥��120��늽Ƕȡ�ƽ플��Ȟ�120�����β���
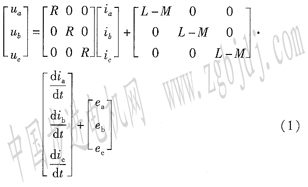
�������У�ua��ub��uc��ia��ib��ic�քe��a��b��c��늉����������R�鶨����裻L��M�քe�鶨�����Ըкͻ��У�ea��eb��ec�鶨�Ӹ��෴늄ݡ�
��������ia+ib+ic=O���Ɍ�����늉�ƽ�ⷽ��ʽ��
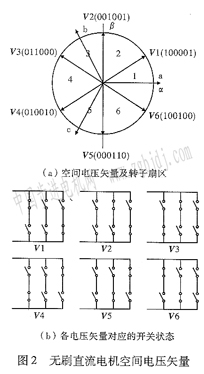
����2���ƽY��������BLDCM DTc����2��1 BLDcM���g늉�ʸ������ֱ���D�ؿ�����늙C�D����ͨ�^���Ƽӵ�늙C�����ϵ�늉��팍�F�ģ���늙C�Ķ�늉��ֺ���׃���_�P�ܵČ�ͨ���P�����P�����ڟoˢֱ��늙C������ͨ��ʽ���f������ÿ��������_�P��B��ͬ�����Եõ�6������ʸ��V2(100001)��V2(001001)��V3(011000),V4(010010)��V5(000110)��V6(100100)��1����ʸ��V0(000000)��6������ʸ����g��60�㣬��aһbһc������������ϵ�֞�6���ȅ^����D2��ʾ��ֱ���D�ؿ��ƾ��Dz����@Щ���g늉�ʸ��ȥ����늙C���Ӵ�朵Ĵ�С�����\�ӷ��Ķ����F��늴��D�صĄӑB���ơ�
�����oˢ�A��늙Cһ��ʹ�û���Ԫ������λ�Â����������Д��D�����ڵ��ȅ^����늙C�D�������ȅ^�_�����x��������늉����gʸ���ɸ�׃���Ӵ�����D�ٶȣ��Ķ��{�����ǦȵĴ�С�����F��늙C�D�ص�˲�r���ơ����D��̎�ڵ�һ�ȅ^�������x��늉�ʸ��V2(00l001)���������D�ؽǣ��������D�ص����ã�늉�ʸ��V5(000110)�������ǜpС�D�ؽǣ��pС늴��D�أ����ʩ����ʸ��V0(000000)���t���Ա��ֶ��Ӵ��λ�ý��Ʋ�׃������늙C�ęCе�r�g����ͨ���h�h����늚�r�g��������һ�������������D��λ��׃��Ҳ��С����˹��ǽ��Ʋ�׃�������pС�D���}�ӵ����á�
����2��2 BLDcM늴��D���^�y�Ʌ����īI[5]���������Nʽ�D�Ӵ�䓵ğoˢֱ��늙C������늙Cd��g�S֮�g�Ļ�����ϣ��ɵ�d��q����ϵ�µ�늴��D��Te��
 ����
����

�����cʽ(3)��ȣ�ʽ(5)�в�����헣�����Ӌ�㣬�����������Ӌ�㾫�Ⱥ�ϵ�y�Č��r�ԡ���ˣ����IJ���ʽ(5)�ĸ��M�����팦늴��D���M�й��㡣
����2��3�Y��������DTC������BLDcM�\���У����ڶ�������Q������P����늉��IJ��_���ԣ����Ӵ���\��܉�E�dz����s�����_�^�y�Ϳ����y�Ⱥܴ��ǣ���늙C�\�����~���D�����µĺ��D�^�r��늙C��϶��ͨ�Ͷ��Ӵ�朵ķ�ֵ�������ֲ�׃������oˢֱ��늙C���D�Ӵ���������w�a�����D�Ӵ�朵ķ�ֵҲ���ƺ㶨������늴��D�؞鶨�Ӵ�机��D�Ӵ��ʸ����e�ĸ��늴��D�،����ֻ����㶨��
�������ң����ڟoˢֱ��늙C�����������Ĵ��ڣ����Բ����M�ж��Ӵ����λ���^�y��ֱ�����û���������ݔ�����D��λ����ֱ̖���x����g늉�ʸ�������늙C�\���ں��D�^�r���ڌ����B�D�ز���Ҫ�ߵĈ��ϣ�������ȥ���yֱ���D�ؿ����еĴ�朜��h���ƭh�����������ƽY��������ϵ�y��ܛӲ���ɱ�����ֻ����늙C�����D�ӵ�λ����̖�������D���c���H�D��֮�g�IJ���x����m�Ŀ��g늉�ʸ�������F��늴��D�ص�ֱ�ӿ��Ƶ�Ŀ�ġ�ԭ����D��D3��ʾ��
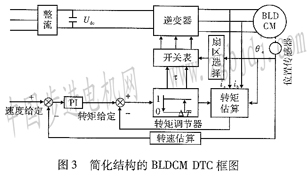
������ԓ����ϵ�y�У����ٶȭhPI�{������ݔ�������D���h���D�ؽo�����D�ؽo������Č��H�D
�����D�أ���t��=O����ʾ�D�ؾS�ֲ�׃��������D���{����ݔ���ӡ��D�������ȅ^s���x�����õ���Ч���g늉�ʸ������˿ɵ����µ��_�P����

����3����͌���о�
����������ĺ����Y��ֱ���D�ؿ��Ʒ���������һ�_�oˢֱ��늙C�M���˷����ԇ��о���늙C�������~��늉�UN=36 V�������R=O��35 ������늸�L=4��4 mH���D�ӑT��J=0��0022kg��m��2�η����O������P=5���~���D��400 r��min.
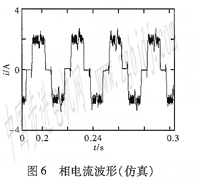
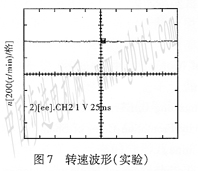
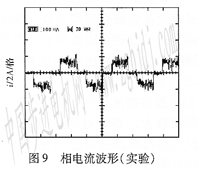
�����D4���D6��늙C��ؓ�d�D�؞�1��2 N��m�r���~���D��400 r��min�����\�Еr���D�١��D�ء�����������εķ���Y�����D7���D9��������ԇ�Ρ����ȿɿ�������������ķ������F�ˌ��oˢֱ��늙C����Ч���ƣ��D�ز����Դ��Կ��������S����֮�ȣ��@Ҳ�����C������ķ�����ԇ�ͷ��沨�λ����Ǻϣ��C����ԓ����������Ч��


����4�YՓ
�����о���һ�N�·f�ğoˢֱ��늙Cֱ���D�ؿ��Ʒ����������ڟoˢֱ��늙C���D�^�\�У��Mһ����չ��BLDcM DTc����˼�롣��Փ�����������ԇ���о������@�N���͵Ŀ��Ʒ���������ϵ�y�Ŀ��ƽY�������M��늴��D�صĹ��㣬�ṩ��һ�N�ͳɱ���ֱ���D�ؿ��ƌ��F���������ڹ��̑��á�












