ժҪ��ͨ�^�����o�S�Ю���늙C��ͬ�����D��d��g����ϵ�µ��·һ��·ģ�͵Ġ�B(t��i)���̣����o�S�Ю���늙Cݔ�����̺������õ����������׃�Q�ͷǾ��Ԡ�B(t��i)���������F(xi��n)�˟o�S�Ю���늙C�D���@�M��ݔ��ݔ�����Ի��������sϵ�y(t��ng)����Ƀɂ������ľ�����ϵ�y(t��ng)��ʹ��Matlah�������������C�����s�ķǾ���ϵ�y(t��ng)��Ȼ�����(j��)���_���Ի���Փ�C���˿��Ԍ�늙C�M�о��_���Ի���������(j��)��������׃�Q������˾��Ի��ĽY���������������Ի���չ����
�����P�I�~���o�S�Ю���늙C�����棻���_���Ի�����B(t��i)����
0 �� ��
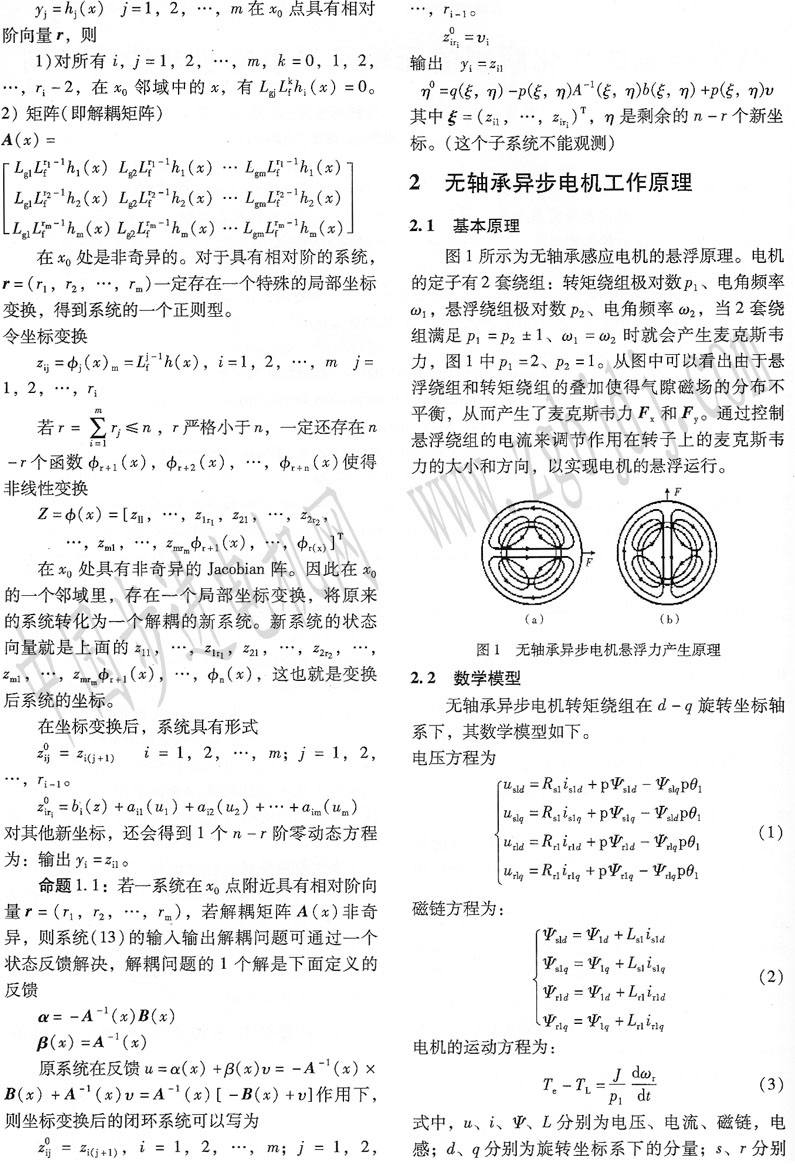
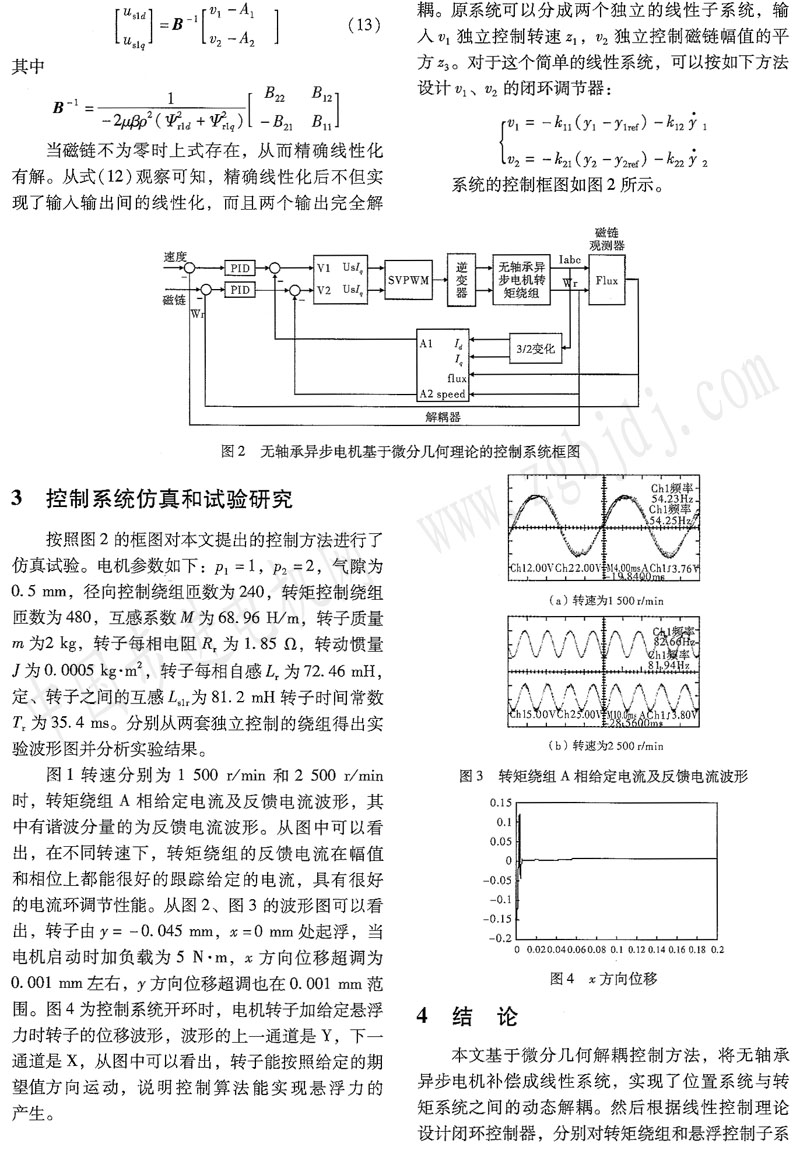
�o�S��늙C�Ǽ����D�c�Ҹ���һ�w������늙C�����ô��S�нY���ͽ���늙C���ӽY���������ԣ����D���@�M�͑Ҹ������@�M��ͬ�@����늙C�Ķ����ϣ��@�ӾͿ���ʡȥ�����S��ʹ늙C���S����g����Ȝp�١��cһ��늙C��ȣ��o�S��늙C��һ�������s�Ķ�׃��������ϡ��Ǿ��Եď��sϵ�y(t��ng)���o�S��늙C�Ҹ����Įa(ch��n)���ǃ��@�M����îa(ch��n)���ĽY����늴��D���c����Ҹ���֮�g������ϣ��ʃ��ߵ�������nj��F(xi��n)늙C��(w��n)���Ҹ��\�еĻ��A���īI[4_5]�քe�����˻��ښ�϶�ň�����ğo�S�Ю���늙C������ơ����ښ�϶�ň���������㷨���s������ʧ��(w��n)�D�ص�ȱ�c���ҽ�(j��ng)�о��l(f��)�F(xi��n)������Ҹ����Ŀ����ܚ�϶�ň���ֵ����λ��Ӱ푣�������ھ����R��늙C�Ě�϶�ň����t�����㷨�ɸ����`���ԡ��īI[6_9]�����D�Ӵň�����ğo�S�Ю���늙C���ƣ���ͨ�^�D���@�M���D�Ӵ�机Ͷ�������ھ����R��늙C�Ě�϶�ň����֎ξ��_���Ի�����ķ��������҇��W��������l(f��)չ�����Ļ���ϵ�y(t��ng)I/O������һ�N���Ի��������ѳɹ���Q�˶�N�Ǿ��Կ��Ɔ��}��
�������Č�ϵ�y(t��ng)��ͬ���������l(f��)�����ò�ͬ��̎���������õ���ͬ�ľ��Ի�Ч�����ڑ����^���п�������b��
�������đ��þ��_���Ի�ԭ������ϵ�y(t��ng)��ݔ�����̳��l(f��)�õ����������׃�Q�c��B(t��i)���������F(xi��n)�o�S�Ю���늙C�Ҹ��@�M�c�D���@�M�Ľ��
�������Č�ԭϵ�y(t��ng)�D�������******������D�ٺʹ��2������������ϵ�y(t��ng)�����F(xi��n)�˄ӑB(t��i)����ȫ��W��
�������o���˷���Y����
����1 �����֎�ݔ��ݔ���Ľ������
һ����ݔ�˶�ݔ���Ǿ���ϵ�y(t��ng)(�@��ٶ�ݔ��ݔ����(sh��)��ȣ�����늙C��r)



|











