����ժҪ�������˻��ڿ��gʸ���{��(sVM)�Į���늙Cֱ���D�ؿ����㷨��ԭ���������Ը��M���������^�yȫ�ٶ�ģ�ͣ�ʹ����^�y���Ӝʴ_��ͨ�^Matlad/Simulink�����о�����C���㷨����Ч�ԡ��ڴ˻��A�ό��H�����ڻ���VxworksǶ��ʽϵ�y��׃�l�{��ϵ�yƽ�_��ȡ�������õĿ���Ч�����C�����㷨�ڹ����о��кܺõđ���ǰ����
�����P�I�~���Б�늄әC��ֱ���D�ؿ��ƣ����gʸ���{�ƣ����ȫ�ٶ�ģ�ͣ�Ƕ��ʽϵ�y�����
O�� ��
�S�������{��ϵ�y�õ�Խ��Խ�V���đ��á�
���������{�ٿ�����Փ�õ��˿��ٰlչ��Խ��Խ������M�Ŀ��Ʒ�ʽ���õ������{���С�ֱ���D�ؿ���(DTc)����ϵ�y�Y�����Ρ��D����ֱ�ӿ��ơ��D�ӑB푑����ٲ���늙C�������F�����������Եȣ����õ��ˏV�����Pע������ҎDTc���õ����D�ء���朜��h���^�����Դ˰�һ��Ҏ�t���A�Ƶ��_�P�����xȡ���m��늉����gʸ����늙C�D�ء�����M��ֱ�ӿ��ơ��īI[2]���������˷N�x��늉�ʸ���ķ�ʽ�o��ͬ�r�M��ϵ�y���D�غʹ�朵��p��Ҫ������DTcϵ�y���F�^��Ĵ�朡��D���}�ӡ����ⳣҎDTcϵ�y�_�P�l�ʲ��㶨�����������������o���õ���ֵ����ã������ڴ���IGBTҪ���_�P�l�ʱ��^�͵���r�£�����ʹ�_�P����������
�������gʸ��(sVM)�{�Ʒ�ʽ���H�������ϵ�y���B���ܣ�ͬ�rҲʹ��׃�����_�P�l��׃����ƺ㶨����˱��J���Ǹ���DTc���B���ܵ�һ�N����ǰ;�ķ�����IJascu����2000������˃ɂ�P1�{�������F늉�ʸ��Ӌ��Į���늙C���gʸ���{��(sVM��DTc)��Ŀǰ�����㷨���о�������ͨ�^Ma��ahģ����C���㷨����Ч�Ժͻ���DsPƽ�_�ĺ��Ό��F���īI[4-5]ͨ�^Madab������C�˴��㷨�ă����Ŀ���Ч��������δ�o��PI�{���������Լ�δ���]�����Hϵ�y���_�P�l�ʵ����ơ��īI[2]��[6]�o���˴��㷨����DsP�ĺ��Ό��F�����ڹ��̑����Ќ���DsPƽ�_��ܛӲ���l�������ƣ��ڌ��Fϵ�y�ă����͏��s�㷨�r�^�����y��
�������ĸ�����ط�����sVM��DTcϵ�y�еČ��F�������ڔ��W�Ϸ�����svM�cDTC�ĺ��νY�Ϸ�ʽ���e���ڴ��ʸ�����^�y�������棬�ô�朵�ȫ�ٶ�ģ�ʹ����^�鳣�õĴ��늉�ģ�ͣ������ڲ�����ϵ�yӲ�����s�Եėl���¸���ϵ�y�����ķ��B���ܣ������փ����ĄӑB���ܡ�ͬ�r���Ì��Q��sVM���{�Ʒ�ʽ���Դ_�������������_�P�l�ʺ㶨��ͨ�^������C��������Բ�ȡ�����^�õ�Ч�����ڴ˻��A�ϣ��M�Ќ���җl���µĻ���VxwworksǶ��ʽϵ�y���ƽ�_���_�l�����H�\��Ч�����ã��w�F�˴��㷨�ڹ��̑����еărֵ��
����l����SVM��DTC�Ŀ���ϵ�y
1��1ϵ�y�Y������D
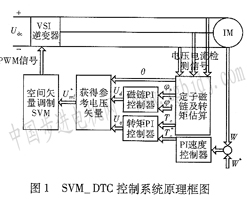
SVM DTcϵ�y��D��Dl��ʾ�����Ѕ���늉�ʸ��uref��Ӌ����SVM��Ԫ����˳�ҎDTc�еĴ�朡��D���h���^�����_�P�����ڈD1�У��z�y����늙C����늉������̖��ȫ�ٶȴ��ģ��Ӌ��ö��Ӵ��ֵ��s��늴��D��ֵTe�ʹ��λ�ýǦȡ����ö��Ӵ���c늴��D��ֵ�c�o��ֵ֮�PI�{��ݔ�������D����ϵ�µą���늉�ʸ��Uduq�ٽ��^Park׃�Q���õ��oֹ����ϵ�µą���늉�ʸ��uref����sVM��Ԫ��ݔ�룬���Ն�ʸ���}���{�Ƶõ��_�P����PWM��̖��
����1. 2 SVM����
����sVM��Ŀ����������׃�����еĻ������g늉�ʸ���ϳ�����ą���늉����gʸ�������y��ֱ���D�ؿ����У�ֻ��6����Ч��늉�ʸ��u1��u6�̓ɂ���ʸ��u0��u7���@8��ʸ���Q��������gʸ���������я�ƽ��ֳ�6���ȅ^��svM���g���nj�������机��D���`��õ���Ŀ��늉�ʸ�������@6������늉�ʸ���̓ɂ���늉�ʸ����������ʸ��늉����ϳɡ���ij���r�̣�Uout���D��ij���ȅ^�У����ɽM���@���ȅ^�ăɂ�����ʸ��Ux��Ux+60����ʸ���քe����T1��T2��T0�r�g���ϳɡ�
������ÿ���ȅ^�ȣ�����ý��Ʊ�ʾĿ��ʸ��늉��ăɂ�����늉��_ͨ���m�r�g��ʽ���ٶ�Ŀ��늉�ʸ�����ڵ�һ�ȅ^������늉�ʸ��Uout�����ģ�����)�S����u����u�±�ʾ��
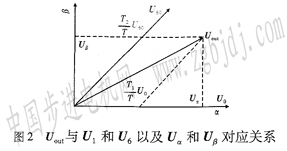
�����D2�У�����늉�ʸ��Uoutλ�ڻ������gʸ��U0��U60���������ȅ^�У����Uout�������@�ɂ�ʸ������ʾ�����������µ�ʽ��
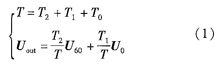
����ʽ�У�T��һ��PwM�������ڣ�T1��T2��ϳ�Ŀ��ʸ���ăɂ�����늉�ʸ�����m�r�g��T0����ʸ�����m�r�g��
������Ŀ��늉�ʸ���ֽ��һ������ϵ���ã�

����ͬ����Ӌ��ó�Ŀ��늉�ʸ����ÿһ���ȅ^�r�������g늉�ʸ���_ͨ���m���Õr�g��
�����OĿ��늉�ʸ�����@�ɂ�����늉�ʸ��uX��Ux+60��늉�ʸ�����ϳɣ�T1,T2�քe��uX��Ux+60���m���õĕr�g�����Ì��QҎ�t�ɘӼ��g��һ���_�P���ڃȣ�늉�ʸ�����õĴ���͕r�g�飺
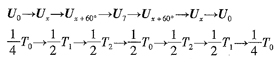
�����ɴ˿�֪��ÿ���_�P��һ���{�����ڃ���Ҫ�_ͨ���P���һ�Σ����F����׃���_�P�l�ʺ㶨��
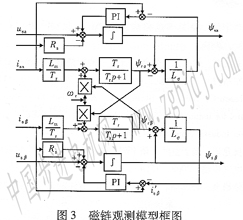
����1��3ȫ�ٶ�ģ��
��ͨ���^�y��ֱ���D�ؿ��Ƽ��g���������P��Ҫ�����á����y����^�y��һ�����늉�ģ�ͻ����ģ�͡�늉�ģ�ͽY�����Σ����ڵ��ٕrӋ���`������ģ�͵������ܺã�������늙C����׃����Ӱ푡���ϵ�y����u��nģ�����鶨�Ӵ�朵��^�yģ�ͣ��C����n��i��i��nģ�͵ă��c���ɶ���늉����D�ف��@�ö��Ӵ�朡���ʽ(2)�õ��D�Ӵ�朦�ra��̖������ʽ(3)�õ����Ӵ�朦�ra��
̖������ʽ(4)�õ��������isa��̖��

�����������M����ʽ���ɵ�uһnģ����D3��ʾ��ͨ�^ݔ�붨��늉����D����̖����Ӌ��@��늄әC�����������ܺõ�ģ�M�ˮ���늙C�ĸ�����������
����1��4����늉�ʸ��u����u�µĴ_��
���Ӵ�朷�ֵ�`����D���`��քe���^һ��P1���������õ��˅���늉����������D����ϵ�µăɂ�����ud�cuq��
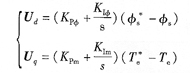
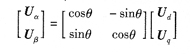
�����@�ɂ��������Ԫ����ؿ��ƶ��Ӵ�机��D�أ��ٽ��^Park׃�Q�����õ����g�����{������ą���늉�����u���cu��.
����2�����о�
�����x�����ཻ�������Б�늙C P= 4kW

�������D�؞�30 N��m���D���_���o��ֵ����֮����t=0��1 s��ؓ�d�D�؞�20 N��m�����Ӵ��܉�E��������D�١��D��׃��������D4��ʾ��
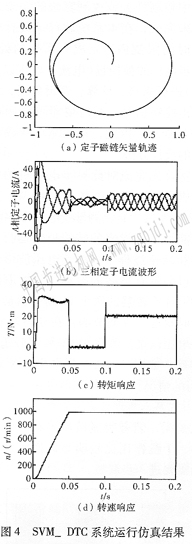
�����ɷ��沨�ο�Ҋ��ϵ�y�ڲ���0 05 s���_���O���D�١��oՓ������߀����ͻ��ؓ�d����r�£����܉�E���^�ӽ��A�Σ��D��푑��ܿ죬���B�r�D�ز��ӷ���С�ڡ�O��3 N��m����������������^���кܴ��ܿ��_�����������ඨ������黥��120����λ�ǵ����Ҳ��Σ��oՓ�������Ӽ���߀���ڷ��B�\�Еr��ϵ�y���푑�Ч�����dz��á�
�����ɴ˿���C���㷨�ɑ����ڌ��Hϵ�y��
����3Ƕ��ʽϵ�y�Č��F���Y������
����������õĵ�׃�l�{��ϵ�y���·�Y����Ҋ�īI[8]��Ƕ��ʽϵ�yӲ��ƽ�_��������GE��˾��VMIc�����ܿ�������ԓ�����������S����Ӳ���_�l�YԴ֧�֣��������N�����ܵ�̎����ģ�塢����I��Oģ�塢ͨӍ�M��������o���Oҕ�����O��ȣ����ڲ�ͬϵ�y���ܵļ���һ�w�����F��
����ܛ��ƽ�_����Ƕ��ʽ���r����ϵ�yvxworks�����ڿ���ϵ�y�п����΄ջ�����㷨�Č��F��KҪ�����ó������ɣ��ڱ�ϵ�yܛ�����OӋ�У������һ���ĕr�g���ƃȣ����һϵ�е�̎���^�̣�����������늙C�ı�����(�����늉��Լ��D�ٵȻ�����̖)�M�вɘӡ�Ӌ�㡢߉�Д࣬��ɿ����㷨��ݔ��������̖��ͬ�rҪ�����ܳ��F�Ĺ��ψ��e���M��̎������ˣ����û���vxworks�Č��r���΄յ��OӋ������
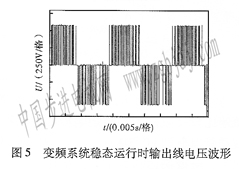
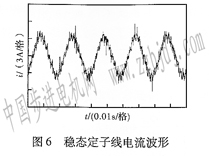
���������������Ɍ��ˮ���늄әC�Ŀ��d�ӌ�늙C�������~������Pe=4 kw���~��늉�Ue=380 V�������ֱ����ĸ��늉���540 v��
����늙C�܉����O�����D�ٷ����\�У�����늙C���ӺͼӜp���^���У����늉�����׃�ĺܲ�Ҏ�t��늙C������������ӡ�����ԭ����������ڴ�����h���^���ăɂ�PI�{���������ǰ��������\�Еr��BӋ���{���ģ��ڄӑB�{���^���У����F����늉��`���ʹsVPwM�����x��늉�ʸ������ʴ_����D5���D6��늙C���~���l��50Hz���\�е���r����늉����ο�֪������svMһDTc���Ʒ�ʽ�������F���_�P�l�ʵĺ㶨��������νӽ����Ҳ����������@�C���ɔ_��ԭ���ǿ��d�����С���ɔ_���ñ��^���@���f�������㷨�Ȳ���������Ҫ�Mһ���{����
����4 �Y�Z
�����U����sVM��DTc�㷨��ԭ������ͨ�^���ô��ȫ�ٶ�ģ�ͣ���sVM��DTCϵ�y���Ը��M��ͨ�^matlab���棬��C���кܺõĿ���Ч�������˿����㷨߀�ɹ��ؑ��õ�����Ƕ��ʽϵ�y����ƺ��ĵ�׃�l�{��ϵ�y���\�нY�������������ָ�˶��_���˺ܺõ�Ч�������Ҍ��F���_�P�l�ʵĺ㶨������@ʾ�˴��㷨���кܸߵĹ��̑��Ãrֵ��
����
|











