ժҪ����B�˻�������PwM�ij���늙CH������·�Y�����o���˿����·��һ�N�ͳɱ����F��������������M�ɺ���ԭ�����ڴ˻��A�ϣ����·Ч�ʡ�׃����ݔ��늉��C����늙C��늉���ֵ���ƾ��Զȵȷ��棬����������PwM��H���·�cĿǰ���õ�����ʽ�·�����ܲ���������C��ԓ�����·����Ч�����á�
�����P�I�~������늙C�������·������PwM��H���
O�� ��
��늙C(usM)���·�ж�N�Y����ʽ��Ŀǰ������ʽ�·�����^�V��ԓ��·�Y���������Σ����ɵ�usM�\�ӿ����b�ÿ��ԝM���S�����È��ϵ�����Ҳ����һЩȱ�c����׃����ݔ��늉��C�������ߣ�늉���ֵ���ƾ��ԶȲ�����ȣ��������\�ӿ����b�����ܵ��Mһ����ߡ����������D���в�usM��������B�˻�������PwM��H������·�Y�����o���˶�������PwM������̖�l������һ�N�ͳɱ����F���������M���ˌ����C��Ч�����á�
����1��������PWM��H������·
�Dl��ʾ�鱾����������늙CH���ӿ����·�Ļ����Y�����D�й���M0sFET�_�P����Q1��Q8���Ƀɂ�H��������PwM������̖PwMAlһPwMD2�Ŀ����£���ֱ��늉��D�Q����l������늉���ͨ�^����׃��������ƥ��늸зքe��usM��A��B��������մ�Ƭ����ƥ��늸п�����Ч�؞V��������늉��еĸ��l�C���ɷ֣����F�������Ҳ��ӡ�
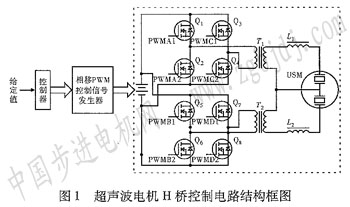
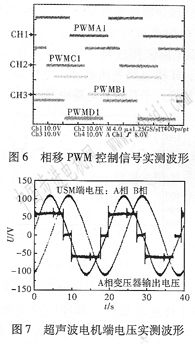
��������H����׃�Q�·���ԣ����õ�PwM���Ʒ����ǣ��ϡ�����_�P������PWM��̖���a��λ�ڌ��Ǿ��ϵăɂ��_�P������PwM��̖��ͬ��ͨ�^�{��PwM������̖ռ�ձȁ���׃ݔ������늉���ֵ�������@�N���Ʒ�ʽ��H��ݔ������늉��Č��H���κͷ�ֵ���Hȡ�Q��PwM������̖ռ�ձȣ������c�m���^�����P�����c��ؓ�d���|(���Ի�����)���P���@����ݔ��늉��C�������ߣ�ռ�ձ�һ��ֵ�{�������Sؓ�d���|׃����׃���������~��Ŀ��ƷǾ��ԡ�
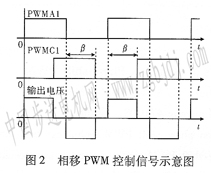
�����c����������ͬ���D1��ʾ�·��������PWM���Ʒ����������_�P������P�s_M������̖ռ�ձȹ̶���50����(��Ӌ���^)���ϡ�����_�P������PWM��̖���a���D2�o��������PwM������̖��ʾ��D��
�����D����̖���R�c�Dlһ�¡��{�����Ҙ���_�P����PWM��̖����λ��(��D2��ʾ�½�)�����Ը�׃ݔ��늉��}�_��ռ�ձȣ�늉���ֵ���S֮��׃����������PwM���Ʒ�����H��ݔ��늉����H��PWM������̖�Q�����cؓ�d���|���m���^�̟o�P��
��������PwM������̖�l�����LjD1��ʾ�·����Ҫ�h��֮һ���䌍�F�����ж�N��ͬ�ķ�ʽ��
�����ٲ��ÃȺ�PwM��Ԫ��늙C���ƌ���DsPоƬ��ͨ�^ܛ�����̌��F�����ǣ�����Ŀǰ����ϵ�е�DSP����ᘌ����y늙C���È����OӋ�ģ������PwM��Ԫ�Ԅ����ɵ�PwM��̖����������PWM��Ҫ�����@ЩDSP���F����PwM����һ��PwM�������ڃ���Ҫ���푑��Д࣬ռ�ô���Ӌ��r�g��ʹDsP��Ӌ�������o����������ڌ��F���Ʋ��ԣ�����������ƹ��ܵ������l�]��
�����ڲ��Ì�������PwM����оƬ����ucc3895�ȡ��@���оƬ������Ҋ�����Ҷ��Ǟ��Դ���ö��OӋ�ģ�ֻ�ܽo����һ��H���4·����PwM������̖���o���o���D1�·��ʾuSM������Ҫ�ăɂ�H��f�{���Ƶ���̖����ˣ���оƬͬ���{�����y�ڌ��F�����@ЩоƬ������PwM������̖�l����ͨ���c�������܆�Ԫ������һ���y�چΪ�ʹ�á��{����
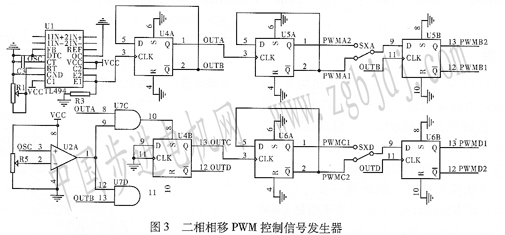
��������ᘌ�uSM�ӑ��������OӋ��һ�N�ͳɱ��Ķ�������PwM������̖�l�����·����D3��ʾ��ԓ�·�܉�a�����ڿ��ƶ���H���8·����PwM������̖��������λ��̶���90����H��ݔ��늉��l�ʡ���ֵ(�}��)�����B�m�{����
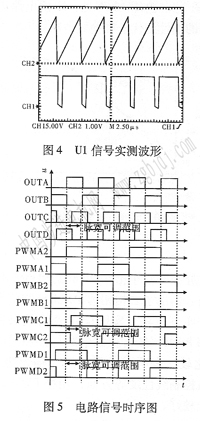
�����D3�У�ul��ͨ��PwMоƬT1494�����·�У��H����T1494������ʎ������m�·�a���r���̖��δ�����}���{�����ܡ�TL494���O�Þ�ζ�ݔ��ģʽ��ݔ���}�_��̖ռ�ձȞ�****ֵ���{���λ��R1�����B�m��׃ݔ���}�_��̖�l�ʡ�ͬ�r��Tf494��ʎ���a������X��(�D3����̖Osc)Ҳ�����������������{�����D4��u1��̖�Č��y���Ρ��D��chl��ݔ���}�_��̖��ch2��Osc��
�����D3��6��D�|�l�������������|�l�����Ҷ����������l���Ԯa�������8·����PwM������̖��ulݔ���}�_��̖����D�|�l��u4A�ĕr�ݔ�룬u4Aݔ���ķ��l��̖OuTA��OuTB�քe�B����D�|�l��u5A��u5B�ĕr�ݔ��ˣ��������l�õ�ݔ����̖PwMAl��PwMA2��PwMBl��PwMB2���քe����D1��M0sFET Q1��02��05��Q6�ĖŘO����̖��������̖�ĕr���Pϵ��D5��ʾ��
���������D1�c�D2����ʹ��H��ݔ��늉���ֵ���{���D1��Q3��Ql��Q5��Q7�ŘO����̖����λ����B�m�{�����@һ��λ���{���ɈD3�еı��^��U2A���F����J2A�ăɂ�ݔ��քe��ǰ����X����̖0sc�́����λ��R5�ı��^�ƽ��u2A������ݔ����̖���cOscͬ�l���}�_��̖���������c�Tu7c��u7D��D�|�l��U4B���ɵĶ����l�·��ݔ����̖������D4���Կ��������{��R5��׃�c��X������^���ƽ��ֵ�r�����^��u2Aݔ���}�_��̖�������clJ4A�r���̖(�༴�D4��chl)��������֮�g����λ��S֮��׃���ɴˌ��F����PwM�����������λ�Ƅӡ�
�������c�Tu7c��u7D��D�|�l��Ij4B���ɵĶ����l�·�������ڌ��F���l���ܵ�ͬ�r�����C��̖0uTA��0uTB��OuTc��OuTD֮�g���д_�����ȡ���r���Pϵ��OuTc��OuTD�քe�B����D�|�l��u6A��u6B�ĕr�ݔ��ˣ��������l�õ�ݔ����̖PwMcl��PwMc2��PwMDl��PwMD2���քe����D1��M0sFET Q3��Q4��Q7��Q8�ĖŘO����̖��
����u5B��u6B��D��ݔ��քe����U5A��u6A��ݔ���������Ǹ��Ե�ݔ��ֵ�������Ǟ��ˌ��F��·PwMݔ����̖֮�g�Ļ��i����ʹ����֮�g���д_������λ�Pϵ���ε��p�S�_�PSXA��SXD�Á���׃����H��ݔ����̖����λ�ʹ֮��+90���һ90�㣬������uSM�����D���D��
����ԓ�·�������C������������Ч�����á�
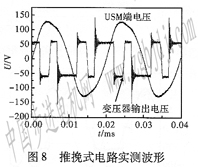
�����D6���D7�քe������PwM������̖��׃����ݔ��늉���uSM��늉����y���Ρ�
����2 ���܌���
��ǰ������uSM�ӿ����·�ж�N��ͬ�ĽY����ʽ������ʽ�·�Y���������Σ������^�V��
���������ݔ��늉��C�����·Ч�ʡ�ݔ��늉���ֵ���ƾ��Զȵȷ��棬�����Ľo��������PwM��H���·������ʽ�·�M�����܌��ȡ���ʹ֮���пɱ��ԣ������ʹ��ͬһ�_uSM�әC���ɷN�·����ͬһ�Mݔ��׃��������ƥ��늸С�������ʽ����Ҫ��׃����ԭ߅�@�Ѓɂ���ͬ���@�M��H���·ֻʹ������һ���@�M��
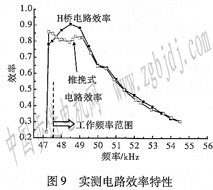
����1)׃����ݔ��늉��C������ʽ�·׃����ݔ��늉����m���^��Ӱ푣����Ώ��s���C�������ߡ��D8������ʽ�·���y׃����ݔ��늉���uSM��늉����Ρ�H���·�������ڈD7�нo��������ƪ������̎���ٽo�����������y���Δ�����Ӌ���������PwM����ռ�ձȾ���30���r������ʽ�·׃����ݔ��늉���THD(���C��ʧ��)ֵ�s��H���·��2������PwM����ռ�ձ�������50��������·��׃����ݔ��늉�������ͬ������ռ�ձ�50���Ľ�׃������
�������ȈD7�c�D8�е�uSM��늉����ο��Կ�������ʹ����ͬƥ��늸е���r�£�����H���·׃����ݔ��늉��C�������ͣ���uSM��늉����Ҷ����@��������ʽ�·���@������H���·ƥ��늸е�ȡֵ�����^������ɶȣ������ڸ���ϵ�y��������Ҫ���M�����w�����OӋ��
����2)�·Ч��
��������ʽ�·��Ҫ4��M0sFET������PWM��H���·�Y���^����ʽ�·���s����Ҫ8��MOs��FET������·�����^���еĹ��������p���^��
������һ���棬H���·׃����ݔ��늉���uSM��늉��C�������ͣ����ǹ����·���C���p�ĜpС��
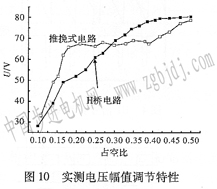
�����D9��ɷN�·��Ч�ʌ��y�������������l���^�ߣ�uSM�D���^�͕r���ɷN�·��Ч���ஔ���S�������l�ʽ��ͣ�uSM�D�����ߣ�H���·Ч�ʸ�������ʽ�·���������l��څ����uSM�Cе��ʎ�l�ʕr��H���·Ч���½�������ʽ�·Ч���Ը���H���·��������uSM�Cе��ʎ�l�ʸ�����늙C�\�в���������մ�����^���������ѣ�����uSM�Č��H�\���l�ʷ���ͨ���O�Þ��Ե��ڙCе��ʎ�l�ʡ��ڹ����l�ʷ����ȣ�H���·Ч�����ԃ�������ʽ�·��
����3)늉���ֵ���ƾ��Զ�uSM��ֱ�ӿɿ�׃�������늉����l�ʡ���ֵ����λ��ɿ�׃�����{���Ǿ��Ա��F�����ϵ�yǰ��ͨ���еĿ��ƷǾ��ԣ��p���@һ�Ǿ������������uSM���ƵĄӑB���ܡ�
����H�������ʽ�·��uSM��늉���ֵ�{�����Dz���PwM���g���F������ʽ�·�{��PwM������̖��ռ�ձȣ����Hݔ��늉����κͷ�ֵ���Hȡ�Q��PwM������̖�������c�m���^�����P����������H���·�t��ͨ�^��̖����λ�Ƅӌ��F��ֵ�{����ݔ��늉����H��PWM������̖�Q�����cؓ�d���|���m���^�̟o�P��
�����D10��ɷN�·�Č��yռ�ձ�һuSM��늉���ֵ�{�����ԡ���������PwM��H���·���Dʾռ�ձȔ�ֵ������λ��Q����׃����ݔ��늉�ռ�ձ�(��Ҋ�D2)���ɈD10��Ҋ��H���·늉���ֵ�{�����Եľ��Զȃ�������ʽ�·��
����3�YՓ
���Ľ�B�˻�������PWM�ij���늙CH������·���o���˶�������PwM������̖�l�����ĵͳɱ����F���������H���ñ���Ч�����á����Č�����PWM��H������·�c����ʽ�·�M�������ܱ��^���������·Ч�ʡ�ݔ��늉��C����늉���ֵ���ƾ��Զȵȷ��棬����PwM��H������·�����^�á�
����
|











