����ժҪ��ʹ�ô�p�ٱȜp�������l(w��i)���쾀ָ��C(j��)��(g��u)�y�ԏĂ���(d��ng)�ĩ�˷��ƫ@��늙C(j��)�ľ��_λ����Ϣ��������ͬ��늙C(j��)(PMSM)���Ӱ��b�_�P(gu��n)HALL���ڼ�(x��)��늽Ƕȿ��g����(g��u)��һ�Nλ�Â��������^�õĽ�Q�������������һ�N�������M(j��n)������Փ���_�P(gu��n)HALLݔ����̖(h��o)�c늙C(j��)�ŘOλ�ö���(bi��o)������ԓ�����o(w��)������ⲿ�O(sh��)�伴����ɶ��_�P(gu��n)HAI Jl_�c늙C(j��)�����ôŘOλ��늽Ƕ���̖(h��o)֮�g�Č�(du��)��(y��ng)�P(gu��n)ϵ����(sh��)�(y��n)�Y(ji��)������������ԓ���������Ļ��ڶ��_�P(gu��n)HALL��PMSMʸ������ϵ�y(t��ng)��(d��ng)�B(t��i)푑�(y��ng)�졢�D(zhu��n)�ٷ�(w��n)���ȸߣ��ڴ����^��Ħ���D(zhu��n)����r���D(zhu��n)�پ����_(d��)��2���������(q��)��(d��ng)Ч�ʸߣ����ڔ�(sh��)��(sh��)�F(xi��n)����(w��n)���ɿ��ȃ�(y��u)�c(di��n)��
�����P(gu��n)�I�~���쾀ָ��C(j��)��(g��u)������ͬ����Hall�����M(j��n)�����gʸ���}���{(di��o)�ƣ���(sh��)����̖(h��o)̎����
0.�� ��
PMSM�����M(j��n)���Ʒ�����PMSMģ�M��һ�_(t��i)���M(j��n)늄�(d��ng)�C(j��)���M(j��n)��λ���_�h(hu��n)���ƣ�����ȡ���^�ö�λЧ���������(q��)��(d��ng)���ʺ㶨���(q��)��(d��ng)Ч�ʟo(w��)�����C��PMSM�ğo(w��)���������Ʒ����ܵ�����(gu��)�W(xu��)���P(gu��n)ע�ʹ����о������ǻ��߲��m�ϵ��ّ�(y��ng)�ã�����Ҫ��늙C(j��)�߂�ijЩ���Ա����^���O�ʣ����m����ͨPMSM��(y��ng)�á�
����ͨ�^(gu��)��늙C(j��)���Ӱ��b�_�P(gu��n)HALL�����_�P(gu��n)��̖(h��o)�c늙C(j��)�ŘOλ����Ϣ�M(j��n)�И�(bi��o)�������ԫ@����ȵ�λ����Ϣ�������Ԙ�(g��u)��ʸ������ϵ�y(t��ng).Ҳ�ЌW(xu��)�߽Y(ji��)�ϷQ��顰�Οo(w��)�����������������ǰ��b�`��ŘOƫ���ϵ�y(t��ng)�`��Ĵ��ڌ���(y��n)��Ӱ�ϵ�y(t��ng)���ƾ��ȣ�����ݔ�������`��������һ�N�������M(j��n)������Փ���_�P(gu��n)HAlll_ݔ����̖(h��o)�c늙C(j��)�ŘOλ�Ø�(bi��o)�������������g늽Ƕȼ�(x��)�֣��(q��)��(d��ng)PMSM���M(j��n)�\(y��n)�У�ͬ�r(sh��)��(bi��o)��HALL��̖(h��o)��B(t��i)��ͨ�^(gu��)��(bi��o)����ÿ�NHALL��̖(h��o)��B(t��i)������늙C(j��)�ŘO̎��һ���Ŀ��g늽Ƕȷ�����(n��i)���˕r(sh��)����ʹ�ý���ʸ�����ƻ�ֱ���D(zhu��n)�ؿ��ơ�ͨ�^(gu��)һ�_(t��i)���b9�_�P(gu��n)HALLPMSM�M(j��n)�Ќ�(sh��)�(y��n)����(sh��)�(y��n)�Y(ji��)������ԓ��(bi��o)�����������^�ߣ�����(j��)ԓ�����@�õ�늙C(j��)λ����̖(h��o)�������������(q��)��(d��ng)ʹ�ã�ϵ�y(t��ng)�\(y��n)�����á�
����PMSM�IJ��M(j��n)������ָʹͬ��늄�(d��ng)�C(j��)�Ě�϶�ń�(d��ng)��(sh��)���B�m(x��)�����D(zhu��n)�ň�(ch��ng)׃?y��u)��xɢ�IJ��M(j��n)�ň�(ch��ng)��ʹ�D(zhu��n)����һ�������ǰ�M(j��n)�Ŀ��Ʒ������īI(xi��n)[3]�������һ�N늉�ʸ�����ֵIJ��M(j��n)���Ʒ������˷�����������y�T�����У���(sh��)�(y��n)�Y(ji��)��������Ѹ�ٵ��D(zhu��n)��푑�(y��ng)���īI(xi��n)[4]Ԕ��(x��)������ʹ��6��(g��)��늉�ʸ�����Ʒ�����ģ�͘�(g��u)��ԭ��������͌�(sh��)�(y��n)�Y(ji��)���������D(zhu��n)��푑�(y��ng)��Ѹ���ԡ��īI(xi��n)[5]��B��һ�N�����@�M�����λ���ֵķ�����ʹ��bH�Nͨ늷�ʽ��ÿһ�Nͨ늷�ʽ�a(ch��n)��һ�N�ض���С�ͷ���ď�(f��)λ�D(zhu��n)�أ�����늄�(d��ng)�C(j��)���D(zhu��n)���i����һ��(g��)�ض���λ���ϣ����o���Č�(sh��)�(y��n)�C��12���M(j��n)��ʽ����Ч�ԣ��īI(xi��n)[6]��ʹ��bH�Nͨ늷�ʽ�Ļ��A(ch��)�ϑ�(y��ng)���˾ؽǿ��Ʒ������������D(zhu��n)��푑�(y��ng)���ԣ��īI(xi��n)[7]���һ�NPwM���^(q��)�_�h(hu��n)�a(b��)���������(q��)��(d��ng)�b���Л]��������D(zhu��n)�١�λ�õ��]�h(hu��n)���ƭh(hu��n)��(ji��)����������Եõ����ƣ����_(d��)��32��һ��(g��)ѭ�h(hu��n)��ÿ�D(zhu��n)128�������o����(sh��)�(y��n)�C����������Ч�ԣ����M(j��n)���_(d��)���ˣ�8125�㡣�īI(xi��n)[8]��12���M(j��n)��ʽ���A(ch��)��ʹ��ģ���������������ϵ�y(t��ng)��(d��ng)�B(t��i)푑�(y��ng)���ԡ�
��������ʹ�â�˾���a(ch��n)늙C(j��)���ƌ���DsPоƬ�M������ϵ�y(t��ng)��(du��)PMsM�M(j��n)�ж�λ���ƣ���(y��ng)��svPwMݔ����ʽݔ���ض��D(zhu��n)�ǵ�늉�ʸ������(sh��)�F(xi��n)360��늽Ƕȵ�65536���֡���Փ�ϲ�����_(d��)��19.8�壬��(sh��)�(y��n)�Y(ji��)���C�������Ŀ��Ʒ��������^�߶�λ���ƾ��ȡ���?y��n)�?x��)��?j��n)?sh��)���Ը��ߣ����ԷQ�����M(j��n)���Ʒ�����
1 ���M(j��n)���Ʒ�ʽ
����1��1 ���D(zhu��n)�ň�(ch��ng)�xɢ���鲽�M(j��n)�ň�(ch��ng)����늉�ʸ����늽Ƕȷ�����[O�㣬360��]�����֞�k�ݣ��Qk�鼚(x��)��?j��n)?sh��)k��[1��+��]���t��늽Ƕ�Ӌ(j��)��IJ��M(j��n)�Ǟ飺
�����O(sh��)늙C(j��)�O��(du��)��(sh��)��pm���tÿ�D(zhu��n)��(x��)�ֵIJ��M(j��n)��(sh��)Ŀ��pmk���C(j��)е���M(j��n)�Ǟ飺
������Փ��k���ԟo(w��)�tae��������С������늉�ʸ��������С��ae���M(j��n)�������D(zhu��n)����am���M(j��n)����K��λ��ָ��λ�ã���Ҫ���D(zhu��n)�ٕr(sh��)������늉�ʸ������m�����M(j��n)�Ǽ�mae���D(zhu��n)��m�����D(zhu��n)���{(di��o)��(ji��)��ݔ����
����1��2���M(j��n)�\(y��n)��(d��ng)�ľؽ�����
PMSM��(w��n)�B(t��i)�\(y��n)�Еr(sh��)�����Զ�����裬�����F�ġ��sɢ�p��ӛ��늴Ź��ʣ����D(zhu��n)�ع�ʽ��
ʽ�У�Te��늴��D(zhu��n)�أ�pn��늙C(j��)�O��(du��)��(sh��)�����D(zhu��n)�����Ŵ�朣�is��늙C(j��)�������ʸ����ֵ���R���
��ʸ���c�D(zhu��n)��ֱ�S�A�ǣ��ޞ�늙C(j��)늽��ٶȣ�Ld��ֱ�S늸У�Lq�齻�S늸С�
һ����NʽPMsM��·��(du��)�Q������Ld=Lq�������ɴ�·����(du��)�Q������Ĵ����D(zhu��n)�أ��ɵã�
��ʽ��֪������������ʸ����ֵis��׃����׃���ʸ���c�D(zhu��n)��ֱ�S�A�ǿڣ��t늴��D(zhu��n)���c��
�Ǧ�����ֵ�����ȡ�ʹ늉�ʸ�����M(j��n)���D(zhu��n)����׃�ؽǦȣ����������pС�D(zhu��n)�أ���(sh��)�F(xi��n)��λ���{(di��o)�١�
�{(di��o)�ٷ�(w��n)�B(t��i)�\(y��n)�Еr(sh��)������늽Ƕ�Ӌ(j��)�㣬늉�ʸ�����D(zhu��n)һ�ܣ����D(zhu��n)�ń�(d��ng)��(sh��)�ښ�϶��Ҳ���D(zhu��n)��2��r��
늽Ƕȣ��������D(zhu��n)�ń�(d��ng)��(sh��)ÿ��犵��D(zhu��n)�ٞ飺
n1=f/pn (5)
ʽ�У�f�鶨��������l�ʡ�
��λ���ƕr(sh��)��ؓ(f��)�d�D(zhu��n)���У�
T1=Tem=KUsin��1 (6)
ʽ�У�T1��ؓ(f��)�d�D(zhu��n)�أ���1�鷀(w��n)�B(t��i)�ؽǡ�
���ƕr(sh��)�҂�ֻ��_������늉�ʸ��Uref�ķ�ֵU�����ʼ��λ��i����ʹ�䰴���҂�Ҏ(gu��)���ķ���
��m��늲��M(j��n)��mae���M(j��n)���D(zhu��n)�����У�
��=��i+mae (7)
���ھؽǞ��1����r�¿���PMsM���M(j��n)�\(y��n)�С�
2 HAILL��B(t��i)��(bi��o)������
2��1 HALL��B(t��i)�@ȡ
���_�P(gu��n)HAI����̖(h��o)ȫ����������(j��ng)ȥ�������·���{(di��o)���·������DsP����9��(g��)HALL늙C(j��)������
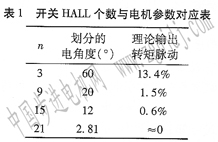
����늽Ƕȿ��g���֞�18��(g��)�^(q��)�g����D1��ʾ��

�ɈD��֪�@18��(g��)��B(t��i)��100001111��000001111�ȣ���ʮ�M(j��n)�Ɣ�(sh��)ֵ��15��30����496��
�����˶��M(j��n)�Ɣ�(sh��)������λ����̖(h��o)�M(j��n)��늙C(j��)���ơ�
����2��2�D(zhu��n)���}��(d��ng)�_�P(gu��n)HALL��(g��)��(sh��)�c��(x��)��늽Ƕȿ��g�P(gu��n)ϵ���������
��������(j��)��1��ʾ���C�Ͽ��]�D(zhu��n)���}��(d��ng)�Ͱ��b��(f��)�s�ȣ��x��9HAJL_����ͬ��늙C(j��)�M(j��n)�Ќ�(sh��)�(y��n)��
����2��3�ŘOλ����Ϣ�@ȡ������һ��(g��)���������У��ګ@�ò��M(j��n)�ǵ���r�£���회����M(j��n)���c��һ�ο���ݔ������o����λ�ǽY(ji��)���ԫ@�ñ��ο���ݔ�����˕r(sh��)���ԫ@�ýo����늙C(j��)�ŘOλ�á�������d��B(t��i)�£����ڴ����������ã��ŘO�����o��λ�æ�r_ref���ǴŘO���挍(sh��)λ�æ�r���ڌ�(sh��)�Hϵ�y(t��ng)�У�����Ħ�����������ص�Ӱ푣���(hu��)��һ��(g��)ؓ(f��)�d�Ǧ�1=��r_refһ��r���ڣ��˕r(sh��)�����؞飺
������fissin�Ȟ�������1��Ӱ푣����O(sh��)���������p����ƽ��ģ��M(j��n)�����²��E�M(j��n)���{(di��o)ԇ��
������ʹ늙C(j��)�M(j��n)�����D(zhu��n)����(d��ng)HA LL_��B(t��i)�l(f��)����׃�r(sh��)ֹͣ늙C(j��)�\(y��n)�У�ӛ䛮�(d��ng)ǰ��r_ref(1)����ʹ늙C(j��)���D(zhu��n)����(d��ng)HALL��B(t��i)�l(f��)����׃�r(sh��)ֹͣ늙C(j��)�\(y��n)�У�ӛ䛮�(d��ng)ǰ��r_ref(2)���۴�HALL��B(t��i)��׃̎λ��ӛ���r_reC=[�Ȧ�r_ref(2)]��2��
����������HALL���������b�y�����`��Ĵ��ڣ����Կ��Ԍ�(du��)ÿ̎HALL��B(t��i)��׃̎λ���M(j��n)�И�(bi��o)����
����������Դ��`��t�����M(j��n)��һ�Θ�(bi��o)��������ȡ��(g��)��(du��)�Q늽Ƕ�λ�ü��ɡ�
����������ϵ�y(t��ng)��Ҫ�ɷ�(w��n)��ֱ���Դ�·��ϵ�y(t��ng)�o���·����(sh��)�a�@ʾ�·�����؆�ԪоƬ�����x�(q��)��(d��ng)�·��MOsFET�����·��HALL����z�y(c��)�·����λ�Ùz�y(c��)�·���D(zhu��n)�ٙz�y(c��)�·���^(gu��)���^(gu��)���z�y(c��)�·�;��܂���(d��ng)�C(j��)��(g��u)�M�ɡ�ϵ�y(t��ng)�o���·�ṩ��λ�ýo����̖(h��o)����(sh��)�a�@ʾ�·�@ʾĿǰϵ�y(t��ng)������Ϣ��HA LL����z�y(c��)�·�ɘ�M0sFET�����·ݔ���������(j��ng)�V�����ƽ�D(zhu��n)�Q����O Vһ3 V����z�y(c��)��̖(h��o)������DSP�ɂ�(g��)12λAD�D(zhu��n)�Q��Ԫ��9·�_�P(gu��n)HALL����9·��̖(h��o)����(j��ng)�V�������·����DsPоƬ����λ����̖(h��o)��ϵ�y(t��ng)�Y(ji��)��(g��u)ԭ����D2��ʾ��
��2��4ϵ�y(t��ng)����(sh��)
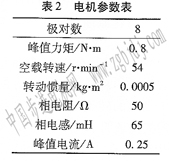
��(sh��)�(y��n)ʹ��늙C(j��)����(sh��)���2��ʾ��
����2��5���M(j��n)65536��(x��)�ֿ���
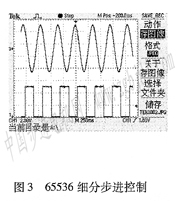
����(x��)��?j��n)?sh��)k=65 536����D3��ʾ������1����������Ρ���ϵ�y(t��ng)���õ���sVPwM�{(di��o)�Ʒ�ʽ���ڵ��ٕr(sh��)���ԳʬF(xi��n)���^�õ������ԣ����ڸ��ٕr(sh��)������Ό��ɞ��R���Ρ���?y��n)�sVPWM�{(di��o)�Ʊ��|(zh��)��һ�N�{(di��o)�Ʋ���������(du��)�Q���R���ζɵġ�Ҏ(gu��)�t�ɘӵ�һ�N׃��sPwM�����R�����{(di��o)�Ʋ��Ɍ�(du��)�Q���Ҳ���ע���������C����������a(ch��n)�������ڼ�(x��)��?j��n)?sh��)�ܸߣ�늙C(j��)����������y�Կ�������X��@Ҳ���C��늙C(j��)�\(y��n)��ƽ��(w��n)������2��һ·HALL��̖(h��o)���g��������D(zhu��n)�ٷ�(w��n)����
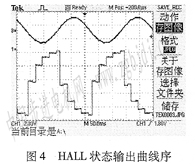
����2��6 HALL��B(t��i)׃��
��D4��ʾ��늙C(j��)�\(y��n)�Юa(ch��n)����HALL��̖(h��o)��B(t��i)׃��������1��늙C(j��)�����������2��HALL��B(t��i)��̖(h��o)��(j��ng)�^(gu��)DAݔ������Ҋһ��(g��)늽Ƕ����ڃ�(n��i)��B(t��i)��18��(g��)��ͬ��(sh��)�֣��c3��(ji��)����һ�¡���(j��ng)3����(ji��)�������E�M(j��n)�И�(bi��o)�����Ԡ�B(t��i)10000011l�������ڼ�(x��)�֠�r��(bi��o)��������4500��8140����(du��)��(y��ng)늽Ƕȿ��g��24 7�㡫44 7�㣬�����D1��ʾ����Փ�ϵ�늽Ƕ�λ����4��7���ƫ�ƫ��ā�(l��i)Դ�ǰ��b�`��ŘOƫ����`��Դ�C�����õĽY(ji��)�����؏�(f��)��(bi��o)�������18��(g��)HALL��B(t��i)��ȫ����(bi��o)����
����2��7��(bi��o)����HALL��̖(h��o)����ʸ������
��(d��ng)DsP�@��һ��(g��)늙C(j��)λ��HALL��B(t��i)��r_rec�r(sh��)��늙C(j��)�D(zhu��n)��λ������늽Ƕȿ��g�����_�����������ƫ��ڴ�늽Ƕȿ��g��(n��i)�J(r��n)���D(zhu��n)��λ�Þ����gֵ��r_m:
���Ժ�(ji��n)�������^(gu��)�̡��˕r(sh��)�������ʸ����λ�o���鳬ǰ��r_m90��늽Ƕȣ����麆(ji��n)����ʸ�����ơ���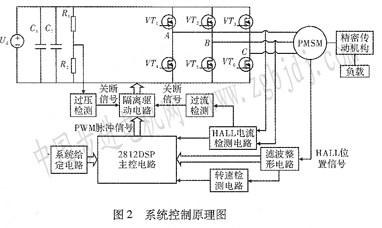 �� ��
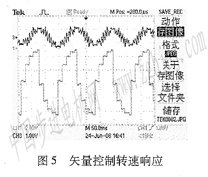
�D5��ʾ��PMsMʸ�������D(zhu��n)��푑�(y��ng)�������������푑�(y��ng)����������2��HALL��B(t��i)��̖(h��o)��(j��ng)�^(gu��)ݔ���������������������(y��ng)���_�P(gu��n)HAI JIl��̖(h��o)��(x��)��늽Ƕȿ��g��18�ݣ��t��18��(g��)늉�ʸ����ʹ��늙C(j��)����౻��(x��)�֞�18�ݡ�����(j��)��1��֪���ˌ�(du��)ݔ������****�D(zhu��n)���}��(d��ng)ֻ��l(w��i) 5����������2��Ҋ��(bi��o)����HAIll_��̖(h��o)ݔ�������D(zhu��n)�ٷ�(w��n)������(j��ng)��(sh��)�H�y(c��)������늙C(j��)�����^���S���A(y��)�o�������д�Ħ������������r�£��D(zhu��n)�ٷ�(w��n)�����_(d��)����2�����D(zhu��n)�ٷ�(w��n)������ȫ�M���ŷ�ϵ�y(t��ng)�O(sh��)Ӌ(j��)Ҫ��
����3.�Y(ji��)Փ
���������һ�N�������M(j��n)���Ʒ���������ͬ��늄�(d��ng)�C(j��)HALL��̖(h��o)��(bi��o)���������ǰѲ��M(j��n)���Ʒ�ʽ��HALL��̖(h��o)�c�D(zhu��n)��늽Ƕ���Ϣ��Y(ji��)�ϵĺ�(ji��n)����Ч�Ę�(bi��o)����������(bi��o)�����HALL��̖(h��o)��ֱ������ʸ�����ơ���(sh��)�(y��n)�Y(ji��)�����������Ę�(bi��o)��������(zh��n)�_�ԣ�����(j��)�˘�(bi��o)�����M(j��n)�п��ƣ����ܝM�����Ҫ���кܺõđ�(y��ng)��ǰ����ʹ�Ãr(ji��)ֵ��
|











